Documentos de Académico
Documentos de Profesional
Documentos de Cultura
PL y Simplex
Cargado por
Walter VelascoTítulo original
Derechos de autor
Formatos disponibles
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Denunciar este documentoCopyright:
Formatos disponibles
PL y Simplex
Cargado por
Walter VelascoCopyright:
Formatos disponibles
Universidad de los Andes-CODENSA
Programacin Lineal y el Mtodo Simplex.
Programacin No Lineal y los Teoremas de Lagrange y
Khun-Tucker.
Introduccin
La programacin matemtica es una potente tcnica de modelado
usada en el proceso de toma de decisiones. Cuando se trata de
resolver un problema de este tipo se deben tener en cuenta:
1. Identificar las posibles decisiones a tomar.
2. Determinar que decisiones resultan admisibles (Conjunto de
restricciones).
3. Clculo coste/beneficio de cada decisin (Funcin objetivo).
Cualquier problema de programacin requiere identificar cuatro
componentes bsicos:
1. El conjunto de datos
2. El conjunto de variables involucradas en el problema, junto con
sus dominios respectivos de definicin.
3. El conjunto de restricciones lineales del problema que definen el
conjunto de soluciones admisibles.
4. La funcin lineal que debe ser optimizada.
Problema del Transporte
Cierto producto debe enviarse en determinadas cantidades
u
1
,,u
m
, desde cada uno de m orgenes, y recibirse en cantidades
v
1
,,v
n
, en cada uno de los n destinos. Determine las cantidades
x
ij
, que deben enviarse desde el origen i al destino j, para
conseguir minimizar el coste de envo.
1. Datos
m: el nmero de orgenes
n: el nmero de destinos
u
i
: la cantidad que debe enviarse desde el origen i
v
j
: la cantidad que debe ser recibida en el destino j
c
ij
: el coste de envo de una cantidad de producto desde el origen i
al destino j
2. Variables
x
ij
: la cantidad que se enva desde el origen i al destino j. Se
supone que las variables deben ser no negativas.
(1)
3. Restricciones: Las restricciones del problema son:
(2)
El primer conjunto de condiciones indica que la cantidad del
producto que parte del origen i debe coincidir con la suma de las
cantidades que parten de ese origen hasta los distintos destinos
j=1,,n.
El segundo conjunto de condiciones asegura que el total recibido
en el destino j debe corresponder a la suma de todas las
cantidades que llegan a ese destino y parten de los distintos
orgenes i=1,,m.
Los grupos de restricciones presentados en (1) y (2) muestran las
restricciones de las variables y del problema, respectivamente.
4. Funcin a maximizar
En el problema de transporte nos interesa minimizar los costos de
envo (suma de los costos de transporte de todas las unidades). Es
decir, se debe minimizar:
(3)
n 1,..., j m; 1,..., i ; 0 = = >
ij
x
=
=
= =
= =
m
1 i
j ij
n
1 j
i ij
n 1,..., j ; v x
m 1,..., i ; u x
= =
=
m
i
n
j
ij ij
x c Z
1 1
Ejemplo El Problema del Transporte:
Considrese el problema de transporte mostrado en la figura 1,
donde m=3 orgenes, n=3 destinos, u
1
=2, u
2
=3, u
3
=4, v
1
=5, v
2
=2,
v
3
=2.
Figura 1. Esquema del problema de transporte.
En este caso el sistema es
|
|
|
|
|
|
|
|
.
|
\
|
=
|
|
|
|
|
|
|
|
|
|
|
|
.
|
\
|
|
|
|
|
|
|
|
|
.
|
\
|
=
2
2
5
4
3
2
1 0 0 1 0 0 1 0 0
0 1 0 0 1 0 0 1 0
0 0 1 0 0 1 0 0 1
1 1 1 0 0 0 0 0 0
0 0 0 1 1 1 0 0 0
0 0 0 0 0 0 1 1 1
33
32
31
23
22
21
13
12
11
x
x
x
x
x
x
x
x
x
CX
1,2,3 j i, ; 0 = >
ij
x
Las tres primeras ecuaciones establecen la conservacin del
producto en los tres orgenes y las tres ltimas igualdades, la
conservacin del producto en los tres destinos.
Si se concretan los valores particulares:
Para los costos de envo, el problema consiste en minimizar:
El mnimo de la funcin objetivo es 14, que corresponde a:
|
|
|
.
|
\
|
=
1 2 3
2 1 2
3 2 1
c
33 32 31 23 22 21 13 12 11
2 3 2 2 3 2 x x x x x x x x x Z + + + + + + + + =
|
|
|
.
|
\
|
=
2 0 2
0 2 1
0 0 2
X
Problema de la Planificacin de la
Produccin
Un productor fabrica una pieza, cuya demanda vara en el tiempo,
de acuerdo con la siguiente figura.
Figura 2. Grfico de la demanda en funcin del tiempo.
El productor debe atender la demanda mensual siempre. En
general cualquier problema de planificacin admitir diversas
posibilidades que aseguren que la demanda es convenientemente
atendida:
a) Produccin variable: El fabricante puede producir cada mes
el nmero exacto de unidades que le solicitan.
b) Produccin Constante: El fabricante que debe atender una
demanda que cambia con el tiempo puede producir por encima
de dicho nivel en periodos de baja demanda y almacenar la
sobreproduccin para los periodos de demanda mayor.
Los problemas de esta naturaleza ilustran las dificultades que
surgen cuando objetivos contrarios estn presentes en e un
sistema dado.
1. Datos
n: el nmero de meses a considerar
s
0
: la cantidad almacenada disponible al principio del periodo
considerado
d
t
: el nmero de unidades (demanda) que se solicita en el mes t
s
max
: la capacidad mxima de almacenamiento
a
t
: el precio de venta en el mes t
b
t
: el costo de produccin en el mes t
c
t
: el costo de almacenamiento en el mes t
2. Variables
x
t
: el nmero de unidades producidas en el mes t
s
t
: el nmero de unidades almacenadas en el mes t
3. Restricciones
La demanda d
t
en el mes t debe coincidir con el cambio en el
almacenamiento ,
s
t-1
s
t
, ms la produccin xt en el mes t; la capacidad de
almacenamiento no puede excederse; y la demanda d
t
,
almacenamiento s
t
, y produccin x
t
deben ser no negativas.
1
max
; 1, 2,...,
; 1, 2,...,
, 0
t t t t
t
t t
s x d s t n
s s t n
s x
+ = =
s =
>
4. Funcin a Optimizar
Una posibilidad consiste en maximizar el ingreso despus de
descontar los costes de la variacin de la produccin y los
inventarios.
Otra posibilidad consiste en minimizar los costos de
almacenamiento:
1
( )
n
t t t t t t
t
Z a d b x c s
=
=
1
n
t t
t
Z c s
=
=
Ejemplo El Problema de la Planificacin de la
Produccin:
Considrese la funcin de demanda en funcin del tiempo
mostrada en la siguiente tabla:
Tabla 1. Demanda en funcin del tiempo.
Supngase que la cantidad almacenada inicialmente es s
0
=2.
Entonces el sistema se transforma en:
1
2
3
4
1
2
3
4
1 0 0 0 1 0 0 0 0
1 1 0 0 0 1 0 0 3
; , ; 1, 2,3, 4
0 1 1 0 0 0 1 0 6
0 0 1 1 0 0 0 1 1
s
s
s
s
Cx st xt o t
x
x
x
x
| |
|
|
|
| | | |
|
| |
|
| |
= = > =
|
| |
|
| |
\ . \ .
|
|
|
|
\ .
Donde el cero en la matriz de la derecha procede a restar la
demanda para t=1 del almacenamiento inicial.
Si se maximiza el beneficio despus de descontar los costos y los
inventarios, y se toma a
t
=3, b
t
=1, c
t
=1, el problema de optimizacin
se convierte en:
Maximizar
Sujeto a las restricciones ya mencionadas.
Resolviendo este problema encontramos que el valor mximo es:
Lo que implica ningn almacenamiento.
1 2 3 4 1 2 3 4
36 Z x x x x s s s s =
1 2 3 4 1 2 3 4
26 para ( , , , , , , , ) (0, 0, 0, 0, 0,3, 6,1)
T
Z x s s s s x x x x = = =
Problema de la Dieta
Se conocen los contenidos nutritivos de ciertos alimentos, sus
precios y la cantidad mnima diaria de nutrientes aconsejada. El
problema consiste en determinar la cantidad de cada alimento que
debe comprarse para satisfacer los mnimos aconsejados y
alcanzar un precio total mnimo.
1. Datos
m: el nmero de nutrientes.
n: el nmero de Alimentos.
a
ij
: la cantidad del nutriente i en una unidad del alimento j.
b
i
: la cantidad mnima del nutriente i aconsejada.
c
j
: el precio de una unidad del alimento j.
2. Variables
x
j
: la cantidad del alimento j que debe adquirirse.
3. Restricciones
Como la cantidad total de un nutriente dado i es la suma de las
cantidades de los nutrientes en todos los alimentos y las
cantidades de alimentos deben ser no negativas, entonces
tenemos:
4. Funcin a Minimizar
En el problema de la dieta se esta interesado en minimizar el
precio de la dieta:
Minimizar
Donde c
j
es el precio unitario del alimento j.
1
; 1,...,
0; 1,...,
n
ij j i
j
j
a x b i m
x j n
=
> =
> =
1
n
j j
j
Z c x
=
=
Ejemplo El Problema de la Dieta:
Considere un caso con cinco nutrientes y con los mnimos
aconsejados para los nutrientes digeribles (DN), protenas
digeribles (DP), calcio (Ca), y fsforo (Ph) dados en la siguiente
tabla:
Tabla 2. Contenidos nutritivos de cinco alimentos
Las restricciones se convierten en
1
2
3
4
5
1 2 3 4 5
78.6 70.1 80.1 67.2 77.0 74.2
6.50 9.40 8.80 13.7 30.4 14.7
0.02 0.09 0.03 0.14 0.41 0.14
0.27 0.34 0.30 1.29 0.86 0.55
, , , ,
x
x
x
x
x
x x x x x
| |
| | | |
|
| |
|
| |
| >
| |
|
| |
|
\ . \ .
|
\ .
0 >
Supngase que los precios unitarios de los alimentos son:
De este modo se tiene el siguiente PPL:
Minimizar
Sujeto a las restricciones ya mencionadas.
Con la solucin de este sistema se obtiene la solucin
1 2 3 4 5
1, 0.5, 2, 1.2, 3 c c c c c = = = = =
1 2 3 4 5
0.5 2 1.2 3 Z x x x x x = + + + +
0.793 en el punto (0,1.530,0,0.023,0) Z =
Problema del Flujo en un a Red
Supngase una red de transporte (conduccin hidrulica,
ferrocarril, carreteras, etc.) a travs de la cual se desea enviar un
cierto material (aceite, grano, vehculos, mensajes, etc.) de un
conjunto de nodos de la red, llamados nodos fuente, a un conjunto
de puntos de destino, llamados nodos sumideros. Adems de
stos, la red contiene nodos intermedios, donde no tienen lugar ni
entradas ni salidas de material. Sea x
ij
el flujo que va del nodo i al
nodo j (positiva en la direccin ij ,y negativa en otro caso).
1. Datos
g: el grafo g=(N,A) que describe la red de transporte, donde N es el
conjunto de nudos, y A es el conjunto de conexiones.
n: el nmero de nudos en la red.
f
i
: el flujo entrante (positivo) o saliente (negativo) en el nudo i
m
ij
: la capacidad mxima de flujo en la conexin entre el nudo i y el
j
c
ij
: el precio de mandar una unidad del bien desde el nudo i al nudo
j.
2. Variables
x
ij
: el flujo que va del nodo i al nodo j
3. Restricciones: Las restricciones del problema son:
Imponiendo la condicin de conservacin del flujo en todos los
nudos, y las restricciones sobre la capacidad de las lneas o
conexiones, se obtienen las siguientes restricciones:
Restricciones de conservacin del flujo
(4)
Restricciones de capacidad de las lneas o conexiones
(5)
donde i<j evita la posible duplicacin de restricciones.
4. Funcin a minimizar: El precio total es:
(6)
As, debe minimizarse (6) bajo (4) y (5).
Las redes de abastecimiento de agua, los sistemas de
comunicaciones, y otros, conducen a problemas de redes de
transporte como el descrito aqu.
n 1,..., i ; ) ( = =
i j ji ij
f x x
j i ; < s s
ij ij ij
m x m
=
ij
j i ij
x c Z
Ejemplo El Problema de Flujo en Redes:
Considrese el problema de flujo en la red de la figura 3 donde las
flechas indican los valores positivos de las variables del flujo.
Figura 3. Esquema del problema de transporte.
En este caso el sistema es
(7)
Donde se supone que
|
|
|
|
|
.
|
\
|
=
|
|
|
|
|
|
.
|
\
|
|
|
|
|
|
.
|
\
|
4
3
2
1
34
24
14
13
12
1 1 1 0 0
1 0 0 1 0
0 1 0 0 1
0 0 1 1 1
f
f
f
f
x
x
x
x
x
j i ;
j i ;
< s
< s
ij ij
ij ij
m x
m x
2) (7,-4,-1,- ) f , f , f , (f y j, i , 4
4 3 2 1
= < =
ij
m
Supngase adems que . El problema de optimizacin
es minimizar
Sometido a (7). Mediante el software adecuado puede obtenerse la
siguiente solucin:
Esta solucin indica que existe un conjunto de infinitas soluciones,
todas ellas proporcionando el mismo valor ptimo, Z=5.
j i, ; 1 =
ij
c
34 24 14 13 12
x x x x x Z + + + + =
1 0 ;
2
0
4
1
4
) 1 (
2
4
4
3
0
punto el en 5
34
24
14
13
12
s s
|
|
|
|
|
|
.
|
\
|
+
|
|
|
|
|
|
.
|
\
|
=
|
|
|
|
|
|
.
|
\
|
=
x
x
x
x
x
Z
Problema de la Cartera de
Valores
Un inversor es propietario de participaciones de varios valores.
Mas concretamente es dueo de b
i
participaciones de los valores
burstiles A
i
, i=1,2,..m. Los precios actuales de estos valores son
v
i
. Considrese que se pueden predecir los dividendos que se
pagarn al final del ao que comienza y los precios finales de los
diferentes valores burstiles, esto es, A
i
pagar d
i
y tendr un
nuevo precio w
i
.
El objetivo es ajustar la cartera, es decir, el nmero de
participaciones en cada valor, de modo que se maximicen los
dividendos
1. Datos
m: el nmero de valores burstiles
b
i
: el nmero actual de participaciones del valor burstil i
v
i
: el precio actual del valor i por participacin
d
i
: el dividendo que se pagar al final del ao en el valor burstil i
w
i
: el nuevo precio del valor burstil i
r: porcentaje mnimo r del valor actual de toda la cartera que no
debe superarse en el ajuste
s: porcentaje mnimo del valor total actual que no debe superarse
por el valor futuro total de la cartera, para hacer frente a la
inflacin
2. Variables
x
i
: el cambio en el nmero de participaciones del valor burstil i.
3. Restricciones
Se deben asegurar ciertas condiciones que debe satisfacer una
cartera bien equilibrada:
El nmero de participaciones debe ser no negativo
Exigimos que el capital asociado a todo valor concreto, despus
del ajuste, represente al menos una cierta fraccin r del capital
total actual de la cartera
i i
x b >
( ) ( );
i i i j j j
i
r v b x v b x j
| |
+ s +
|
\ .
El capital total de la cartera no debe cambiar en el ajuste pues se
supone que no se invierte dinero adicional
Para hacer frente a la inflacin, el capital total en el futuro debe ser
al menos un cierto porcentaje s mayor que el capital invertido
actualmente:
4. Funcin a optimizar
Nuestro objetivo es maximizar los dividendos
La tarea se concreta al determinar el valor mximo de los
dividendos sujeto a todas las restricciones anteriores.
0
i i
i
v x =
( ) (1 )
i i i i i
i i
w b x s v b + > +
( )
i i i
i
Z d b x = +
Ejemplo El Problema de la Cartera de Valores:
Se tienen participaciones de tres valores burstiles, 75 de A, 100
de B y 35 de C, con precios 20, 20 y 100 dlares, respectivamente.
Se dispone de la siguiente informacin: A no pagar dividendos y
alcanzar una nueva cotizacin de 18 dlares, B pagar 3 dlares
por participacin y la nueva cotizacin ser 23 dlares, y C pagar
5 dlares por participacin con una nueva cotizacin de 102
dlares. Si se toman los porcentajes r como 25 y s, 0.30, todas las
restricciones se escriben como:
| |
| |
| |
75
100
35
0.25 20(75 ) 20(100 ) 100(35 ) 20(75 )
0.25 20(75 ) 20(100 ) 100(35 ) 20(100 )
0.25 20(75 ) 20(100 ) 100(35 ) 100(35 )
20 20 100 0
18(75 ) 23(100 ) 102(35
A
B
C
A B C A
A B C B
A B C C
A B C
A B
x
x
x
x x x x
x x x x
x x x x
x x x
x x
>
>
>
+ + + + + s +
+ + + + + s +
+ + + + + s +
+ + =
+ + + + ) 1.03(7000)
C
x + >
Despus de varias simplificaciones , las restricciones anteriores se
transforman en:
La solucin obtenida es:
75
100
35
15 5 25 250
5 15 25 250
5 5 75 1750
20 20 100 0
18 23 102 270
A
B
C
A B C
A B C
A B C
A B C
A B C
x
x
x
x x x
x x x
x x x
x x x
x x x
>
>
>
>
+ >
+ >
+ + =
+ + >
612.5 dlares y 12.5, 75, 17.5
A B C
Z x x x = = = =
Problema de Distribucin de
Energa
Los generadores de energa, as como las demandas de la misma
se sitan en una red energtica. El objetivo de este problema
consiste en decidir la energa a producir por cada generador de
forma tal que se satisfagan las diferentes condiciones tcnicas de
la red y los generadores, as como las demandas, al mnimo coste.
Cada lnea de transmisin de una red de energa transmite energa
de un bus a otro. La energa transmitida es proporcional a la
diferencia de los ngulos de estos buses (de forma similar a que el
agua que fluye en una tubera que conecta dos tanques es
proporcional a la diferencia de alturas del agua en ambos). La
constante de proporcionalidad tiene un nombre divertido
susceptibilidad. La potencia transmitida desde el bus i al j a
travs de la lnea i-j es por tanto
(8)
donde B
ij
es la susceptibilidad de la lnea i-j, y y los ngulos
de los buses i y j, respectivamente. Por razones fsicas, la cantidad
de energa transmitida a travs de una lnea tiene un lmite. Este
lmite est relacionado con consideraciones trmicas o de
estabilidad. Por tanto, una lnea energtica debe ser operada de
forma tal que su lmite de transmisin no sea excedido.
) (
j i ij
B o o
i
o
j
o
Esta condicin puede formularse como
(9)
donde es la capacidad de transmisin de la lnea i-j. Debe
notarse que la potencia transmitida es proporcional a la diferencia
de ngulos y no, a un ngulo dado. Por tanto, puede fijarse el valor
de un ngulo arbitrario a 0, y tomarlo como origen. Es decir, para
un bus arbitrario k:
(10)
Una consecuencia que se deriva de esta posibilidad de fijar
arbitrariamente un origen es que los ngulos son variables no
restringidas en signo. La potencia generada por un generador es
una magnitud positiva limitada inferiormente, debido a las
condiciones de estabilidad (de forma similar a la de un automvil,
que no puede moverse a una velocidad inferior a un cierto lmite), y
superiormente, debido a lmites trmicos (similarmente a la de un
automvil que no puede moverse a ms de una cierta velocidad
mxima). Las restricciones anteriores conducen a:
(11)
donde p
i
es la potencia producida por el generador i, y y son
constantes positivas que representan, respectivamente, el mnimo
y el mximo de las potencias generadas por el generador i.
0 =
k
o
ij j i ij ij
P B P s s ) ( o o
ij
P
i i i
P p P s s
i P
i
P
En todo bus, la potencia que entra debe ser igual a la potencia que
sale (ley de la conservacin de la energa), que puede escribirse
como
(12)
donde es el conjunto de buses conectados a travs de las lneas
al bus i y D
i
la demanda asociada al bus i.
Como se ha indicado anteriormente, la potencia transmitida a
travs de toda lnea es limitada, por tanto
(13)
1. Datos
n: el nmero de generadores.
: la mnima energa de salida asociada al generador i.
: la mxima energa de salida asociada al generador i.
B
ij
: la susceptancia de la lnea i-j.
: la capacidad mxima de transmisin de la lnea i-j.
C
i
: el coste de producir energa en el generador i.
: el conjunto de buses conectados a travs de lneas al bus i.
D
i
: la demanda asociada al bus i.
i ; ) ( = +
O e
i i
j
j i ij
D p B
i
o o
i
O
i , j , ) (
i
O e s s ij
j i ij
ij P B P o o
i
P
i P
ij P
i
O
2. Variables
p
i
: la energa producida por el generador i.
: el ngulo del bus i.
3. Restricciones: Las restricciones de este problema son
(14)
4. Funcin a minimizar: El objetivo es minimizar el precio total de
la produccin de potencia
(15)
donde C
i
es el precio de la produccin del generador i, y n el
nmero de generadores.
i
o
n 1,2,..., i max; min
,..., 2 , 1 ; j max; ) ( max
,.., 2 , 1 i ; ) (
0
i
= s s
= O e s s
= = +
=
O e
i i
ij j i ij ij
j
i i j i ij
k
P pi P
n i P B P
n D P B
i
o o
o o
o
=
=
n
i
i i
p C Z
1
Ejemplo El Problema de Distribucin de Energa:
Considrese el sistema de la figura 4:
Figura 4. Esquema del problema de Distribucin de Energa.
El generador del bus 1 produce un coste 6 y sus lmites inferiores y
superiores son, respectivamente, 0.15 y 0.6. El coste de produccin
del generador del bus 2 es 7 y sus lmites de potencia son,
respectivamente, 0.1 y 0.4. La lnea 1-2 tiene una susceptancia 2.5 y
un lmite de transmisin mximo de 0.3, la lnea 1-3 tiene una
susceptancia de 3.5 y un lmite de transmisin de 0.5, y, finalmente, la
lnea 2-3 tiene una susceptancia de 3.0 y un lmite de transmisin de
0.4. Este sistema tiene una demanda simple localizada en el bus 3
con un valor de 0.85. Se considera un periodo de una hora, y se toma
como origen el bus 3.
Este problema puede escribirse como:
minimizar
sometido a
Las variables de optimizacin son p
1
, p
2
, y .
La solucin de este problema es:
La solucin ptima requiere que el generador 1 produzca 0.565 y
el generador 2 produzca 0.285.
2 1
7 6 p p +
5 . 0 ) ( 5 . 3 5 . 0
4 . 0 ) ( 0 . 3 4 . 0
3 . 0 ) ( 5 . 2 3 . 0
4 . 0 10 . 0
6 . 0 15 . 0
85 . 0 ) ( 0 . 3 ) ( 5 . 3
0 ) ( 5 . 2 ) ( 0 . 3
0 ) ( 5 . 2 ) ( 5 . 3
0
3 1
3 2
2 1
2
1
3 2 3 1
2 2 1 2 3
1 1 2 1 3
3
s s
s s
s s
s s
s s
= +
= + +
= + +
=
o o
o o
o o
o o o o
o o o o
o o o o
o
P
P
p
p
1
o
2
o
T T
.117,0) (-0.143,-0 , 85) (0.565,0.2 p , 385 . 5 = = = o Z
Introduccin a la Programacin
Lineal
Problema de Programacin Lineal (PPL): La forma mas
general de un problema de programacin lineal consiste en
minimizar o maximizar:
Sujeto a:
donde p ,q y m son enteros positivos tales que .
Solucin Factible: Un punto
que satisface todas las restricciones se denomina solucin factible.
El conjunto de todas esas soluciones es la regin de factibilidad.
=
= =
n
j
j j
x c X f Z
1
) (
=
=
=
= s
= >
= =
n
j
i j ij
n
j
i j ij
n
j
i j ij
b x a
b x a
b x a
1
1
1
1 - 1,2,...p i ,
1 - 1,2,...p i ,
1 - 1,2,...p i ,
m q p s s s 1
) ,..., , (
2 1 n
x x x X =
Solucin ptima: Un punto factible tal que para
cualquier otro punto factible X se denomina una solucin ptima
del problema.
Tpicamente n es mucho mayor que m. Lo que distingue a un PPL
de otros problemas de optimizacin es que todas las funciones que
aparecen son lineales.
En un PPL la regin factible es un Politopo o un Poliedro.
El objetivo de los problemas de optimizacin es encontrar un
ptimo global. Sin embargo, las condiciones de optimalidad
garantizan por lo general ptimos locales. Sin embargo, los PPL
presentan propiedades que hacen posible garantizar el ptimo
global:
o Si la regin factible esta acotada, el problema siempre tiene una
solucin (condicin suficiente pero no necesaria).
o El ptimo de un PPL es siempre un ptimo global.
o Si x e y son ptimos de un PPL, entonces cualquier
combinacin lineal de ellos es tambin un ptimo. Ntese que
una combinacin lineal convexa de ptimos no cambia el valor
de la funcin objetivo.
o La solucin ptima se alcanza siempre, al menos, en un punto
extremo de la regin factible.
X
~
)
~
( ) ( X f X f >
Ejemplo Solucin nica:
Maximizar
Sometido a
tiene por solucin nica Z=12, que se alcanza en el punto P=(3,3)
Figura 5. Ejemplo Solucin nica.
2 1
3 x x Z + =
0
1
0
4 2
3
6
2
1
2 1
2
2 1
1
2 1
2 1
s
s
s
s
s
s +
s +
x
x x
x
x x
x
x x
x x
Ejemplo Solucin Mltiple:
Si la funcin objetivo del problema anterior se reemplaza por:
el problema tiene mltiples soluciones
Figura 6. Ejemplo Solucin Mltiple.
En efecto, cualquier punto del segmento con extremos en los
puntos (2; 4)
T
y
(3; 3)
T
da la solucin ptima del problema (Z = 6).
2 1
3 x x Z + =
Ejemplo Solucin No Acotada:
Maximizar
Sometido a
tiene solucin no acotada
Figura 7. Ejemplo No Acotada.
2 1
3 x x Z + =
0
1
0
2
1
2 1
2
2 1
s
s
s
s +
x
x x
x
x x
Ejemplo Solucin No Factible:
Maximizar
Sometido a
No tiene solucin factible porque la nueva restriccin
no es compatible con las anteriores.
2 1
3 x x Z + =
0
2 1
s + x x
0
0
1
0
4 2
3
6
2
2 1
1
2 1
2
2 1
1
2 1
2 1
s +
s
s
s
s
s
s +
s +
x x
x
x x
x
x x
x
x x
x x
Problema en la Forma
Estndar
Un PPL definido en la forma:
Minimizar
Sometido a
Se dice que est en forma estndar. Ello implica:
1. La funcin objetivo debe minimizarse.
2. las restricciones deben ser de igualdad.
3. El vector debe ser no negativo.
4. Las variables x deben ser no-negativas.
Cualquier problema puede ponerse en forma estndar.
X C Z
T
=
o x
b Ax
>
=
m
b 9 e
Paso a un Problema de Minimizacin:
Un problema de maximizacin puede convertirse en uno de
minimizacin cambiando el signo de la funcin objetivo. El
problema:
Maximizar
es equivalente al problema
Minimizar
sometidos ambos a las mismas restricciones.
Paso a Variables No Negativas:
El conjunto de r variables no restringidas puede escribirse
en funcin de otro conjunto de r + 1 variables no
negativas:
De esta forma se aade una variable en vez del mtodo usual de
aadir r nuevas variables.
Paso a Restricciones de Igualdad:
Se puede conseguir usando variables de holgura:
X C Z
T
= max
X C Z
T
= max
{ }
r
x x ,...,
1
{ }
* * *
, ,...,
1
x x x
r
1,2,...r i ;
* *
= = x x x
i
i
o La desigualdad:
con , equivale a la igualdad
o La Desigualdad:
con , equivale a la igualdad
i n in i i
b x a x a x a s + + + ...
2 2 1 1
0
1
>
+ n
x
i n n in i i
b x x a x a x a = + + + +
+1 2 2 1 1
...
i n in i i
b x a x a x a > + + + ...
2 2 1 1
0
1
>
+ n
x
i n n in i i
b x x a x a x a = + + +
+1 2 2 1 1
...
Ejemplos Transformacin a la Forma Estndar:
o Maximizar
sometido a
Este problema en la forma estndar es
Minimizar
sometido a
o Maximizar
sometido a
3 2 1
5 3 2 x x x Z + =
0 ,
3 3
2
2 1
3 2 1
2 1
>
> +
s +
x x
x x x
x x
) ( 5 3 2
7 6 2 1
x x x x Z + =
0 , , , , ,
3 ) ( 3
2
7 6 5 4 2 1
5 7 6 2 1
4 2 1
>
= +
= + +
x x x x x x
x x x x x
x x x
3 1
3 x x Z =
0
1
1
1
1
3 1
3 2 1
3 2 1
>
> +
s
= + +
x
x x
x x x
x x x
Este problema en la forma estndar es
Minimizar
sometido a
3 3 1
3 z y x Z + =
0 , , , , , , ,
1
1
1
2 1 3 3 2 2 1
2 3 3 1
1 3 3 2 2 1
3 3 2 2 1
>
= +
= + + +
= + +
u u z y z y x
u z y x
u z y z y x
z y z y x
El Mtodo Simplex
Sea el PPL:
Minimizar
Sujeto a
Donde es una matriz de costos y A es una matriz
de m x n.
El mtodo simplex (MS) consta de dos etapas:
o Etapa de Iniciacin
El conjunto inicial de restricciones se transforma en otro
equivalente de igualdades, asociadas a una solucin bsica.
Los valores de las variables bsicas se transforman en no
negativos (se obtiene una solucin bsica factible). Esta
etapa se llama reguladora.
x c x f
T
= ) (
, 0
, 0 ;
>
> =
x
b b Ax
T
n
c c c c ) ,..., , (
2 1
=
o Etapa de Iteraciones Estndar
En esta etapa los coeficientes de la funcin de costo se
transforman en no positivos y el valor de la funcin de costo se
mejora iterativamente, hasta obtener la solucin ptima, se
detecta solucin no factible, o solucin no acotada. En este
proceso iterativo se obtienen diferentes soluciones factibles.
Para este fin se utiliza la llamada transformacin elemental de
pivotaje.
Fase de Iniciacin: Una de las peculiaridades del SM consiste en
incorporar una nueva variable Z, igual a la funcin objetivo del
problema, y la restriccin asociada
Las restricciones son
Y la funcin objetivo
Donde (B N) es una particin de la matriz A, y XB y XN definen
otra particin de x, en variables bsicas y no bsicas,
respectivamente.
n n
x c x c Z + + = ...
1 1
b
x
x
N B
N
B
=
|
|
.
|
\
|
) (
|
|
|
.
|
\
|
=
N
B
T
N
T
B
x
x c c Z
1
) 0 (
Usando la ecuacin de restricciones podemos obtener
donde
Ahora, de la ecuacin de la funcin objetivo y la anterior ecuacin
obtenemos
donde
Para obtener
N N B
N B
Ux v Nx B b B x
b Nx Bx
+ = =
= +
1 1
N B U
b B v
1
1
=
=
N
N
T
N
T
B
T
B
N
T
N N
T
B
wx u Z
x c U c v c Z
x c Ux v c Z
+ =
+ + =
+ + =
0
) (
) (
T
N
T
B
T
B
c U c w
v c u
+ =
=
0
|
|
.
|
\
|
|
|
.
|
\
|
=
|
|
.
|
\
|
N B
x U v
w u
x
Z 1
0
El MS comienza con el conjunto de restricciones
Donde es una particin del conjunto de variables
. Las matrices
se obtienen resolviendo las restricciones en x
B
donde son los coeficientes de costo asociados a x
B
y x
N
,
respectivamente.
Podemos entonces obtener un nuevo conjunto equivalente de
restricciones con la misma estructura
donde t se refiere al nmero de la iteracin y t=0 es la iteracin
inicial.
|
|
|
.
|
\
|
=
|
|
|
.
|
\
|
|
|
|
|
.
|
\
|
+ =
|
|
|
.
|
\
|
N N B
x
Z
x U v
w u
x
Z
T
1 1
) 0 (
) 0 ( ) 0 (
) 0 ( ) 0 (
0
N B
x x { }
n
x x x ,... 2 , 1
) 0 ( ) 0 (
y U v
T
N
T
B
T
B
c U c w V C U + = =
) 0 ( ) 0 ( ) 0 ( ) 0 (
,
T
N
c y
T
B
c
|
|
|
.
|
\
|
=
|
|
|
.
|
\
|
|
|
|
|
.
|
\
|
+ =
|
|
|
.
|
\
|
) (
) (
) ( ) ( ) (
) ( ) (
) (
) (
1 1
0
t
t
t t t
t t
t
t
N N
T
B
x
Z
x U v
w u
x
Z
Programacin No Lineal
El problema ms general de programacin no lineal (PPNL), puede
plantearse como:
Minimizar
Sujeto a
En forma compacta el modelo anterior puede escribirse:
Minimizar
Sujeto a
) ,..., (
1 n
x x f Z =
0 ) ,..., (
0 ) ,..., (
0 ) ,..., (
0 ) ,..., (
1
1 1
1
1 1
s
s
=
=
n m
n
n l
n
x x g
x x g
x x h
x x h
) (x f Z =
0 ) (
0 ) (
s
=
x g
x h
Donde es el vector de las variables de decisin,
es la funcin objetivo, y y , donde
y
son las restricciones de desigualdad y de
igualdad, respectivamente.
La figura 8a muestra que el mnimo del problema se alcanza en el
conjunto de puntos en los que la tangente es horizontal.
Figura 8. Mnimos Locales y Globales.
Sin embargo, si se busca el mnimo de la funcin:
en , se encuentra uno con dificultades, pues no tiene puntos con
derivada nula. Sin embargo, el hecho de que f tienda a cero
cuando x tiende a y que tome valores negativos, indica que f
debe alcanzar su mnimo en algn lugar.
T
n
x x x ) ,..., (
1
=
9 9
n
f :
m n
g 9 9 :
l n
h 9 9 :
T
m
x g x g x g )) ( ),..., ( ( ) (
1
=
T
l
x h x h x h )) ( ),..., ( ( ) (
1
=
3 / 2 3 / 2
) 2 ( ) 2 ( ) ( + = x x x f
9
Un anlisis ms profundo de f revela que el mnimo se alcanza en
, pero f no es diferenciable en este punto. Este simple ejemplo
muestra que se debe tener especial cuidado cuando las funciones
que intervienen no son diferenciables.
Figura 9. Grafica de la funcin .
Hay adems otro problema igualmente relevante, referente a los
problemas no lineales diferenciables. Para ilustrarlo, se considera
la funcin objetivo siguiente
Figura 10. Grafica de la funcin .
2 = x
3 / 2 3 / 2
) 2 ( ) 2 ( ) ( + = x x x f
) cos (sin 10 ) 10 / 1 ( ) (
2
x x x x x f + =
Esta funcin es diferenciable en todo , pero tiene un conjunto
infinito de puntos con tangente horizontal (puntos en los que f(x) =
0). Estos puntos reciben el nombre de puntos estacionarios y
todos ellos, salvo uno, son ptimos locales. Puesto que si se
restringe la atencin a un pequeo entorno de ellos, se convierten
en mximos o mnimos locales. La ecuacin f(x) = 0 no puede ser
resuelta en forma cerrada, por lo que se deben utilizar mtodos
numricos. La existencia de un conjunto infinito de puntos
candidatos y la ausencia de un mtodo para generarlos
explcitamente, conducen a la imposibilidad de conocer, con total
certidumbre, si un determinado candidato es el ptimo global.
Estamos interesados en la clase de funciones tales que sus
mnimos locales sean tambin globales. En la figura se da una
funcin que no cumple esta condicin. Hay puntos en el intervalo
que estn por encima del segmento que une los mnimos. La
convexidad es aqu suficiente para evitar este comportamiento.
Para ser convexa se exige que el grafo est por debajo del
intervalo que une los extremos.
Figura 11. Ilustracin de la Propiedad de Convexidad
9
| |
*
, x x
Un PPNL puede no tener solucin por:
1. La funcin no es acotada en S. Por ejemplo, f(x) = x, donde
decrece sin lmite hasta cuando x tiende a . En este caso se
escribe
2. La funcin es acotada en S pero no se alcanza la cota inferior:
en S. Por ejemplo, la funcin est acotada en y la
cota inferior es 0 pero es inalcanzable por f(x).
Teorema 1 (Existencia de Soluciones ptimas)
Sea S un conjunto cerrado, acotado y no vaco de y
una funcin continua. El problema
Minimizar
Sujeto a
admite al menos una solucin ptima.
Corolario 1 (Existencia de Soluciones ptimas)
Sea S un conjunto cerrado y no vaco (posiblemente no acotado)
de y una funcin continua.
9 e x
=
e
- ) ( nfimo
S x
x f
) ( nfimo
S x
x f
e
x
e x f
= ) (
9 = S
n
9 9 S f :
) (x f Z =
S xe
n
9
9 S f :
Si tenemos:
Entonces el problema es:
Minimizar
sujeto a
admite al menos una solucin ptima.
Estos resultados pueden hacerse ms explcitos cuando la funcin
f es convexa.
Definicin 1 (Mnimo global)
Una funcin f(x) tiene un mnimo global (mnimo global estricto) en
el punto , de S, si para todo x en S.
Definicin 2 (Mnimo local)
Una funcin f(x) tiene un mnimo local (mnimo local estricto) en el
punto , de S, si existe un nmero positivo tal que
(respectivamente, ) para todo x en S tal que
.
+ =
e
) ( lim
,
x f
S x x
) (x f Z =
S xe
x
c
)) ( ) ( ( ) ( ) (
* *
x f x f x f x f < s
*
x
) ( ) ( x f x f s ) ( ) ( x f x f <
c < < x x 0
De ello se concluye que un mnimo global es tambin un mnimo
local. En una dimensin es fcil ilustrar los conceptos anteriores.
En la figura 11, S es el segmento . es el conjunto
de los mnimos locales, y es el conjunto de los mnimos
globales.
Figura 12. Una funcin con tres mnimos locales y dos globales.
Definicin 3 (Diferenciabilidad)
Se dice que es diferenciable en x si existen las
derivadas parciales y
, y
donde es el gradiente de f en x.
| | b a, { }
2 1
, , x x a S = { }
2
*
, x a S =
9 9
n
f :
,
i
x
f
c
c
n 1,..., i =
0
) ( ) ( ) ( ) (
lim =
x y
x y x f x f y f
T
x y
T
n
x
x f
x
x f
x f
|
|
.
|
\
|
c
c
c
c
= V
) (
,...,
) (
) (
1
Definicin 4 (Diferenciabilidad continua)
Una funcin f se dice continuamente diferenciable en si todas las
derivadas parciales son continuas en . En este caso, tambin es
diferenciable.
Se considera el siguiente PPNL:
Minimizar
(1)
sujeto a
(2)
donde con y
son funciones continuamente diferenciables en la regin factible
x
x
) (x f Z =
0 ) (
0 ) (
s
=
x g
x h
l n n
: h , : g , : 9 9 9 9 9 9
m n
f ( )
T
m
x g x g x g ) ( ),..., ( ) (
1
= ( )
T
l
x h x h x h ) ( ),..., ( ) (
1
=
{ } 0 g(x) , 0 ) ( s = = x h x S
Condiciones de Karush-Kuhn-
Tucker (CKKT)
Las condiciones de Karush, Kuhn and Tucker constituyen el
resultado ms importante de programacin no lineal. Deben ser
satisfechas por cualquier ptimo restringido, sea ste local o
global, y para cualquier funcin objetivo, ya sea lineal o no lineal.
Adems, los criterios de parada de los mtodos iterativos se basan
en estas condiciones. Mientras que en los problemas
diferenciables sin restricciones el gradiente se anula en los
mnimos locales, esto no ocurre para problemas con restricciones,
tal como ilustra la figura 11 en el punto . Esto se debe a las
restricciones del problema. Las condiciones de Karush-Khun-
Tucker generalizan las condiciones necesarias de ptimo para los
problemas con restricciones.
Figura 13. En problemas restringidos diferenciables el gradiente no es
necesariamente cero en la solucin ptima
a x =
Definicin 5 (Condiciones de Karush-Kuhn-Tucker):
El vector satisface las condiciones de Karush-Khun-Tucker
para el PPNL (1)-(2) si existe un par de vectores y
tales que
(3)
(4)
(5)
(6)
(7)
Los vectores y son los multiplicadores de Khun-Tucker. La
condicin (6) es la condicin complementaria de holgura. La (7) son
las condiciones duales de factibilidad y requieren la no-negatividad
de los multiplicadores de las restricciones de desigualdad. Las
condiciones (4)-(5) se llaman condiciones primales de factibilidad.
Con el Lagrangiano las condiciones
KKT se escriben como
n
x 9 e
m
9 e
l
9 e
m 1,..., j , 0
m 1,..., j , 0 ) (
l 1,..., k , 0 ) (
m 1,..., j , 0 ) (
0 ) ( ) ( ) (
1 1
= >
= =
= =
= s
= V + V + V
= =
j
j j
k
j
m
j
j j
l
k
k k
x g
x h
x g
x g x h x f
) ( ) ( ) ( ) , , ( x g x h x f x L
T T
+ + =
0 ) , , (
0 ) , , (
0 ) , , (
s V
= V
= V
x L
x L
x L
x
0
0 ) , , (
>
= V
x L
T
Figura 14. Ilustracin de las condiciones de KarushKuhnTucker para el caso de
una restriccin de igualdad y dos variables.
Figura 15. Ilustracin de las condiciones de KarushKuhnTucker para el caso de
dos restricciones de desigualdad y dos variables.
Casos Especiales
Si falta una restriccin en un PPNL, el multiplicador asociado a la
restriccin ausente" es nulo, y la restriccin se elimina de la
formulacin de las condiciones de KKT. En estos casos resulta:
1. (Problemas sin restricciones) En este caso solo se tiene la
condicin:
2. (Problemas con restricciones de igualdad solamente) Las
condiciones de KKT son una extensin del principio clsico del
mtodo de los multiplicadores de Lagrange. Este mtodo slo
surge con problemas que nicamente tienen restricciones de
igualdad:
0 ) ( = V X f
l k X h
X h X f
k
k
l
k
k
,..., 1 , 0 ) (
0 ) ( ) (
1
= =
= V + V
=
3. (Problemas con restricciones de desigualdad solamente)
Las condiciones de KKTC son:
m 1,..., j , 0
m 1,..., j , 0 ) (
m 1,..., j , 0 ) (
0 ) ( ) (
1
= >
= =
= s
= V + V
=
j
j j
j
m
j
j j
X g
X g
X g X f
Ejemplo
Minimizar
sujeto a
Sean los multiplicadores asociados a la igualdad y las
desigualdades, respectivamente. Las condiciones de KKT son:
1. La condicin de estacionariedad del Lagrangiano es:
(8)
2. Las condiciones primales de factibilidad:
(9)
2 1
x x Z + =
0
0
0 4
0
2
1
2
2
2
2
2
1
1
s
s
s +
= +
x
x
x x
x x
3 2 1
y , ,
|
|
.
|
\
|
=
|
|
.
|
\
|
+
|
|
.
|
\
|
+
|
|
.
|
\
|
+
|
|
.
|
\
|
+
|
|
.
|
\
|
0
0
1
2
1
0
0
1
2
2
1
1
1
3 2
2
1
1
x
x
x
0
0
0 4
0
2
1
2
2
2
2
2
1
1
s
s
s +
= +
x
x
x x
x x
3. Las condiciones complementarias de holgura son:
(10)
(11)
(12)
3. Las condiciones duales de factibilidad son:
(13)
Caso I: . Si entonces usando (11), x
1
= 0, y (8) implica
que
Puesto que y no se cumple la condicin (13), entonces los
puntos KKT deben satisfacer .
Caso II: , y . Si entonces usando (12), x
2
= 0, y
la relacin
de (9) se obtiene x
1
= 0, y con (8) resulta
por lo que todo punto KKT debe satisfacer .
0 ) (
0 ) (
0 ) 4 (
2 3
1 2
2
2
2
1 1
=
=
= +
x
x
x x
0 , ,
3 2 1
>
0
2
= 0
2
=
0 2 1
0 1
3 1 2
2
= + +
=
x
1
2
=
0
2
=
0
3
= 0
2
=
0
3
=
0
2
2
1
= + x x
0 1=
0
3
=
Caso III: , y . Si entonces usando (10)
resulta , y con la condicin de factibilidad, resulta el
sistema de ecuaciones:
La nica condicin que satisface el sistema (9) es ,
donde y, con (8) resulta:
cuya solucin es:
que es un punto KKT
Caso IV: .Usando (8), resulta el sistema de
ecuaciones
y se obtiene la solucin y . De (9), se obtiene
, y puesto que se trata de un punto factible, es tambin un punto
KKT.
0
1
= 0
3 2
= = 0
1
= 0 4
2 2
1
2
= + x x
0
0 4
2
2
1
2 2
1
2
= +
= +
x x
x x
( ) o o , = x
2
17 1+
= o
0 2 1
0 2 2 1
1
1
= + +
= +
o
o o
) 2 1 ( 2
2
2
1
0
) 2 1 ( 2
2
1
o o
o o
o
o o
o o
=
>
+
=
0
3 2 1
= = =
0 1
0 2 1
1
= +
=
x
1 = 2 / 1
1
= x
4 / 1
2
1 2
= = x x
Definicin 6 (Restriccin Activa)
Sea , y . La restriccin de desigualdad se
dice que es una restriccin activa en el punto si ; por
otro lado, se dice inactiva si
El conjunto de los ndices de las restricciones activas se denota
por , es decir
Lema 1: Las CKKT son necesarias para un ptimo local de la
mayora de PPNL.
n
x 9 e { } m j ,..., 1 e
x 0 ) ( = x g
j
0 ) ( s x g
j
. 0 ) ( < x g
j
) (x I
{ } 0 ) ( ) ( = = x g j x I
j
Condiciones Suficientes
Definicin 7 (Funcin Convexa)
Sea , donde S es un conjunto convexo no vaco de . La
funcin f se dice que es convexa en S si para cada par de puntos
x
1
y x
2
y cualquier escalar t tal que
0t1, se tiene
Si se cumple la desigualdad estricta anterior, f se dice que es
estrictamente convexa. Similarmente, una funcin f es cncava si
la desigualdad se cumple con la desigualdad se cumple al revs,
es decir, si (-f) es convexa.
Teorema 2 ( ptimo global y local)
Considrese la funcin convexa , donde S es un conjunto
convexo no vaco de . Todo mnimo local de f en S es tambin un
mnimo global de f en S. Adems, si f es estrictamente convexa
hay a lo sumo un nico mnimo global.
9 S f :
n
9
) ( ) 1 ( ) ( ) ) 1 ( (
2 1 2 1
X f t X tf X t tX f + s +
9 S f :
n
9
Las figuras 16, 17 y 18 muestran ejemplos de funciones convexa,
cncava y otra no convexa no cncava.
Figura 16. Ejemplo Funcin Convexa. Figura 17. Ejemplo
Funcin Cncava.
Figura 18. Ejemplo Funcin No Convexa, No
Cncava.
Teorema 3 (Convexidad y diferenciabilidad)
Sea un conjunto convexo y diferenciable en S.
Entonces f es convexa en S si:
Adems, f es estrictamente convexa en S si:
Definicin 8 (Funcin dos veces diferenciable)
Se dice que es dos veces diferenciable en el punto X si
existe un vector columna , y una matriz n x n , tal
que
La matriz se llama la matriz Hesiana de f en el punto X. El
elemento ij de
es la segunda derivada parcial . Por otra
parte, si las derivadas parciales son continuas, entonces f se dice
dos veces continuamente diferenciable y, entonces es una
matriz simtrica.
n
S 9 c
9 9
n
f :
S X X X X X f X f X f
T
e V >
2 1 1 2 1 2 1
, ); ( ) ( ) ( ) (
2 1
2 1 1 2 1 2 1
con , ); ( ) ( ) ( ) ( X X S X X X X X f X f X f
T
= e V >
9 9
n
f :
) (X f V
) (
2
X f V
0
) )( ( ) (
2
1
) ( ) ( ) ( ) (
lim
2
2
=
V V
X Y
X Y X f X Y X Y X f X f Y f
T T
x y
) (
2
X f V
) (
2
X f V
j i
X X X f c c c / ) (
2
) (
2
X f V
Definicin 9 (Matriz semidefinida positiva)
Una matriz simtrica A es semidefinida positiva si para
cualquier vector X. Adems, si la igualdad se cumple slo
cuando x = 0, entonces A se llama definida positiva.
Teorema 4 (Funciones convexas)
Sea un conjunto abierto y convexo y sea dos
veces diferenciable en S. Entonces, se cumple:
1. f es una funcin convexa en S si es una matriz
semidefinida positiva para todo , es decir
2. f es una funcin estrictamente convexa en S si es una
matriz definida positiva para todo , es decir
0 > AX X
T
0 = AX X
T
n
S 9 c
9 9
n
f :
)
~
(
2
X f V
S X e
~
n 2
Y ; 0 )
~
( 9 e > V Y X f Y
T
)
~
(
2
X f V
S X e
~
n 2
Y ; 0 )
~
( 9 e > V Y X f Y
T
Algunas funciones convexas importantes son:
1. Funciones Afines:
Sea , donde , , es una funcin afn.
Entonces, la matriz Hesiana es para todo . Puesto
que esta funcin satisface el Teorema 4, es una funcin convexa.
Ntese que f es tambin cncava puesto que
es igual a cero.
2. Formas cuadrticas:
Sea una forma cuadrtica. Si la matriz C es
semidefinida positiva, entonces f es una funcin convexa, ya
que la matriz Hesiana de f es
para todo X.
a X b X f
T
+ = ) (
b a y 9 e
n
X 9 e
0 )
~
(
2
= V X F
n
X 9 e
~
)
~
)( (
2
X f V
a X b CX X X f
T T
+ + =
2
1
) (
C X f = V ) (
2
Las operaciones que conservan la convexidad son:
1. Combinaciones lineales no negativas de funciones
convexas.
Sean f
i
(X), i = 1,, k funciones convexas, y sean , i = 1,,
k escalares positivos. Considrese la funcin .
Puesto que la suma de matrices semidefinidas positivas es
tambin semidefinida positiva, entonces h es una funcin convexa.
2. Composicin primera.
Si h es convexa y T es una transformacin lineal (o afn), la
composicin g = h(T)
tambin es convexa.
3. Composicin segunda
Si g es convexa, y h es una funcin convexa no decreciente de una
variable, la composicin f = h(g) tambin es convexa.
4. Supremo
El supremo de una familia de funciones convexas es tambin una
funcin convexa.
i
=
=
k
i
i i
X f X h
1
) ( ) (
Condiciones Suficientes de
Karush-Kuhn-Tucker
Lema 2 (Problema de programacin convexa)
Considrese el problema de programacin convexa (PPC):
Minimizar
sujeto a
donde f es convexa y diferenciable y S es un conjunto convexo.
Entonces es un ptimo global si
Teorema 5 (Suficiencia de las condiciones de Karush-Khun-
Tucker)
Considrese el PPNL
Minimizar
sujeto a
) (X f Z =
S X e
S X e *
S X X X X f
T
e > V , 0 *) ( *) (
) (X f Z =
0 ) (
0 ) (
s
=
X g
X h
Supngase que existe una tripleta que satisface
las CKKT. Sea
. Supngase que f(X), g
i
(X) para todo
y h
k
(X) para todo son funciones convexas en , y que h
k
(X)
para todo son funciones cncavas en . Entonces es
una solucin global del PPNL.
Ejemplo 1 Caso Especial sin Restricciones:
Sea convexa en y diferenciable en x
*
. Entonces x
*
es
una solucin global ptima del problema
Minimizar
si
La clase ms importante de PPNL para los que las CKKT son
siempre necesarias y suficientes es la de los llamados programas
convexos (PC), que consisten en minimizar una funcin objetivo
convexa con un conjunto de restricciones tales que las
desigualdades son funciones convexas y las igualdades funciones
afines, es decir:
) , , ( X
{ } { } 0 y 0 < = > =
+
k k
k K k K
) (X I i e
+
eK k
n
9
eK k
n
9 X
9 9
n
f :
n
9
n
x x f Z 9 e = ), (
0 ) (
*
= V x f
Minimizar
Sujeto a
donde f y g son funciones convexas y continuamente
diferenciables, y h es una funcin afn. Un caso particular
importante es el problema de programacin lineal, por lo que los
resultados anteriores son totalmente aplicables a este problema.
En muchos casos tenemos el problema
Minimizar
donde r(x) y s(y) son funciones de dos variables x e y,
respectivamente. Puesto que y no estn restringidos, se trata
de un problema sin restricciones, y las CKKT son:
) (x f Z =
0 ) (
0 ) (
s
=
x g
x h
2
)) ( ) ( ( ) , (
+ =
i
i i
y s x r f | o | o
|
= + =
c
c
= + =
c
c
i
i i
i
i i i
y s x r
f
x r y s x r
f
0 )) ( ) ( (
) , (
0 ) ( )) ( ) ( (
) , (
| o
o
| o
| o
o
| o
Mediante un reordenamiento de las anteriores Ecuaciones
podemos obtener:
La solucin del sistema es:
Teniendo en cuenta que maximizar una funcin es lo mismo que
minimizar la misma funcin cambiada de signo, el problema
consiste en
Minimizar
sujeto a
( )
( )
= +
= +
i
i
i
i
i
i
i
i
i
i
i
y s n x r
y s x r x r x r
| o
| o
) (
) ( ) ( ) (
2
) ) ) ( ( ) ( (
) ( ) ( ) ( ) ( ) (
) ) ) ( ( ) ( (
) ( ) ( ) ( ) (
2 2
2
2 2
=
i i
i i
i i
i i i
i i
i i
i i
i i
i i
i i
i
i i
x r x r n
y s x r x r y s x r
x r x r n
y s x r y s x r n
|
o
| o
2 1
x x Z =
0
0
2
1
2 1
s
s
= +
x
x
C ax x
donde son constantes, tales que , x1 y x2
son los niveles de inversin y de trabajo, respectivamente, y
es la funcin de Cobb Douglas, que da el nivel de produccin
como funcin de ambas variables, y a es el coste por unidad de
trabajo. Adems hay una restriccin de dinero disponible C. Este
es un PPC, pues las restricciones son lineales y la funcin objetivo
es convexa.
0 , 0 > > | o 1 s + | o
| o
2 1
) 2 , 1 ( x x x x f =
Bibliografa
Formulacin y Resolucin de Modelos de Programacin Matemtica en
Ingeniera y Ciencia, Enrique Castillo, Antonio J. Conejo, Pablo
Pedregal, Ricardo Garca, Natalia Alguacil, 2002.
También podría gustarte
- Resumen Libro Fundamento Matemáticos para Las Ciencias Sociales.Documento41 páginasResumen Libro Fundamento Matemáticos para Las Ciencias Sociales.JuankJuankJuank100% (1)
- Capitulo 4 Aproximación Funcional e InterpolaciónDocumento21 páginasCapitulo 4 Aproximación Funcional e InterpolaciónIvan Flores AlmarazAún no hay calificaciones
- CALCULO INTEGRAL Unidad 1: Tarea 1 - El Concepto IntegralDocumento24 páginasCALCULO INTEGRAL Unidad 1: Tarea 1 - El Concepto Integralnidia coral0% (5)
- Programacion Lineal 2Documento16 páginasProgramacion Lineal 2Walter VelascoAún no hay calificaciones
- Programacion Lineal 1Documento15 páginasProgramacion Lineal 1Walter VelascoAún no hay calificaciones
- Hidraulica Finning CatDocumento43 páginasHidraulica Finning CatKjatunMayu GutierrezAún no hay calificaciones
- Teoría HidráulicaDocumento9 páginasTeoría HidráulicaWalter Velasco50% (2)
- VPNDocumento17 páginasVPNWalter VelascoAún no hay calificaciones
- Proyeccion IsometricaDocumento16 páginasProyeccion IsometricaWalter Velasco100% (1)
- Unidad IV Mc3a9todos de Evaluacic3b3n de ProyectosDocumento17 páginasUnidad IV Mc3a9todos de Evaluacic3b3n de ProyectosAlexander HernandezAún no hay calificaciones
- Aportes en El Foro Paso 4Documento3 páginasAportes en El Foro Paso 4tania duranAún no hay calificaciones
- Simulador de PHDocumento4 páginasSimulador de PHPablo Mata CruzAún no hay calificaciones
- Problemario Segundo ParcialDocumento121 páginasProblemario Segundo Parcialmelanie gonzalez TovarAún no hay calificaciones
- Equilibrio Ionico ( EJERCICIOS)Documento2 páginasEquilibrio Ionico ( EJERCICIOS)Jhons Mejía EspejoAún no hay calificaciones
- Tutoría 2 MAT415Documento13 páginasTutoría 2 MAT415LeoAún no hay calificaciones
- Números ComplejosDocumento15 páginasNúmeros ComplejosjoseAún no hay calificaciones
- Artificios de IntegracionDocumento14 páginasArtificios de IntegracionOscarManuelPiñonAún no hay calificaciones
- Modelo de ABP 604Documento6 páginasModelo de ABP 604Leandro GallardoAún no hay calificaciones
- Estadístico Taller Noveno Periodo IVDocumento8 páginasEstadístico Taller Noveno Periodo IVJeysson StiivenAún no hay calificaciones
- 8 TP Teoremas Derivada 2021Documento32 páginas8 TP Teoremas Derivada 2021Jose Bazan PastorAún no hay calificaciones
- Metodos Numericos PDFDocumento3 páginasMetodos Numericos PDFJuan Manuel CarreonAún no hay calificaciones
- Calculo de Integrales DefinidasDocumento6 páginasCalculo de Integrales DefinidasfwfmcmoaAún no hay calificaciones
- AM66 Notas Teoricas 2 1C2024Documento38 páginasAM66 Notas Teoricas 2 1C2024Manuel PueblaAún no hay calificaciones
- Función ExponencialDocumento4 páginasFunción Exponencialrogelio825Aún no hay calificaciones
- Ejercicios PRT 2Documento5 páginasEjercicios PRT 2Alejandro MezaAún no hay calificaciones
- Evaluación de La Calidad de Los Alimentos Mediante La Identificación y Cuantificación de HMF Por HPLC. 3BM2 MC P12Documento6 páginasEvaluación de La Calidad de Los Alimentos Mediante La Identificación y Cuantificación de HMF Por HPLC. 3BM2 MC P12Alfredo SevillaAún no hay calificaciones
- Analisis de Estructuras Semestre I - 2010 Certamen 3 PROBLEMA 1 (50 Puntos)Documento8 páginasAnalisis de Estructuras Semestre I - 2010 Certamen 3 PROBLEMA 1 (50 Puntos)Jake SHAún no hay calificaciones
- Cin U3 A4 JeceDocumento5 páginasCin U3 A4 JeceJess ChávezAún no hay calificaciones
- Pruebas No ParametriasDocumento27 páginasPruebas No ParametriasalonsohuertaAún no hay calificaciones
- Calculo de PH de Ácidos y Bases Débiles y Soluciones AmortiguadorasDocumento8 páginasCalculo de PH de Ácidos y Bases Débiles y Soluciones AmortiguadorasSalvador Zúñiga IbarraAún no hay calificaciones
- Ecuacion de Cacuchy RiemannDocumento3 páginasEcuacion de Cacuchy RiemannMiguel Gonzales BarretoAún no hay calificaciones
- Titulacion Acido Debil, Base FuerteDocumento15 páginasTitulacion Acido Debil, Base FuerteRodrigo DalenceAún no hay calificaciones
- Ejercicios SucesionesDocumento2 páginasEjercicios SucesionesYanely SalazarAún no hay calificaciones
- Informe Valoracion Acido - BaseDocumento4 páginasInforme Valoracion Acido - BaseDiego Yakeraso0% (1)
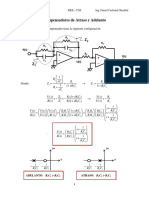
- Compensadores Clases Ee616Documento32 páginasCompensadores Clases Ee616louisAún no hay calificaciones
- MB147Documento3 páginasMB147Giordani LlontopAún no hay calificaciones