0% encontró este documento útil (0 votos)
15 vistas90 páginasModulo 2-3 So
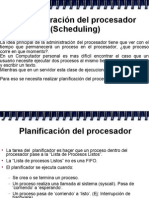
El documento aborda la administración de procesos en sistemas operativos, describiendo conceptos clave como procesos, hilos y modelos de estados. Se analizan diferentes algoritmos de planificación, incluyendo FCFS, SJF, SRTF y Round Robin, así como sus características y aplicaciones. Además, se discuten objetivos de rendimiento y administración en entornos multitarea y multiprocesados.
Cargado por
Jorge Luis LopardoDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd
0% encontró este documento útil (0 votos)
15 vistas90 páginasModulo 2-3 So
El documento aborda la administración de procesos en sistemas operativos, describiendo conceptos clave como procesos, hilos y modelos de estados. Se analizan diferentes algoritmos de planificación, incluyendo FCFS, SJF, SRTF y Round Robin, así como sus características y aplicaciones. Además, se discuten objetivos de rendimiento y administración en entornos multitarea y multiprocesados.
Cargado por
Jorge Luis LopardoDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd