También podría gustarte
- 1.1 Antecedentes Del Concreto y Concreto ReforzadoDocumento4 páginas1.1 Antecedentes Del Concreto y Concreto ReforzadoDaniela ZepedaAún no hay calificaciones
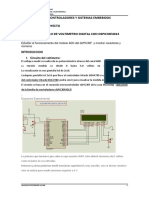
- Voltimetro Digital Con Dspic30f4013Documento3 páginasVoltimetro Digital Con Dspic30f4013abrahan lajo fariasAún no hay calificaciones
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosDe EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosCalificación: 5 de 5 estrellas5/5 (5)
- Planeación y Actividades 4o Grado Del 7 Al 11 de Marzo 2022Documento30 páginasPlaneación y Actividades 4o Grado Del 7 Al 11 de Marzo 2022Pascual Goyito Torres Ortiz100% (1)
- Examen MicroDocumento14 páginasExamen MicroElias Morales RosasAún no hay calificaciones
- Informe Enero 22Documento19 páginasInforme Enero 22Michael VargasAún no hay calificaciones
- BennyAlvaro L8 PDFDocumento15 páginasBennyAlvaro L8 PDFJefte Torres SilvaAún no hay calificaciones
- Informe Motor de Induccion Parte 1Documento19 páginasInforme Motor de Induccion Parte 1Cristian MolinaAún no hay calificaciones
- P1 Entradas y Salidas Digitales ReporteDocumento10 páginasP1 Entradas y Salidas Digitales ReporteDavid FernandezAún no hay calificaciones
- Introducción Arduino y PrácticasDocumento11 páginasIntroducción Arduino y PrácticasJorge ArevalosAún no hay calificaciones
- Practica Nro 9 Display 7 Segmentos Catodo ComunDocumento16 páginasPractica Nro 9 Display 7 Segmentos Catodo ComunMarcoAún no hay calificaciones
- Componentes Del ArduinoDocumento13 páginasComponentes Del ArduinoErick Martinez GámezAún no hay calificaciones
- Prácticas de LaboratorioDocumento20 páginasPrácticas de LaboratorioJavier Zarate NeiraAún no hay calificaciones
- Diseño de Automata y Construccion de Robot Seguidor de LineaDocumento12 páginasDiseño de Automata y Construccion de Robot Seguidor de LineaIGianpiere Nizama Agurto100% (1)
- Informe Arduino1-2Documento17 páginasInforme Arduino1-2Erick Martins Quispe GutierrezAún no hay calificaciones
- Informe Laboratorio 7 Mic600Documento7 páginasInforme Laboratorio 7 Mic600Jose Ubaldo Cantuta Zuazo100% (1)
- Electronica 7Documento12 páginasElectronica 7A L O E SAún no hay calificaciones
- P01Control de Puertos Digitales Con ArduinoDocumento10 páginasP01Control de Puertos Digitales Con ArduinokristelAún no hay calificaciones
- Práctica Arduino L293D Simulación TinkercadDocumento4 páginasPráctica Arduino L293D Simulación Tinkercadrichard navarreteAún no hay calificaciones
- parcial 1Documento7 páginasparcial 1Jhoan Andrey Gomez HernandezAún no hay calificaciones
- Cómo Hacer Un SumobotDocumento20 páginasCómo Hacer Un SumobotJose Neira Galvez100% (1)
- Clase de RoboticaDocumento119 páginasClase de RoboticaDavid GonzalesAún no hay calificaciones
- Generador de Funciones ArduinoDocumento9 páginasGenerador de Funciones Arduinolordkarm100% (1)
- IooijkDocumento12 páginasIooijkDavid A CostaAún no hay calificaciones
- ARDUINO 1 y 2 Victor LópezDocumento17 páginasARDUINO 1 y 2 Victor LópezVictor LopezAún no hay calificaciones
- Microcontrolador Dspic VoltimetroDocumento6 páginasMicrocontrolador Dspic VoltimetroChristian QCAún no hay calificaciones
- Calculo para La IngenieriaDocumento40 páginasCalculo para La IngenieriaAlfonso AndersonAún no hay calificaciones
- Proyecto EinformelaboratorioDocumento12 páginasProyecto EinformelaboratorioJOAN SEBASTIAN PABON PINEDAAún no hay calificaciones
- Arduino L298Documento8 páginasArduino L298Adriana Muñoz MuñozAún no hay calificaciones
- Microprocesadores Practica 4Documento9 páginasMicroprocesadores Practica 4Lizette BlueAún no hay calificaciones
- LAB 7 Arduino Funciones LógicasDocumento6 páginasLAB 7 Arduino Funciones Lógicasroger macias marcaAún no hay calificaciones
- Automotion Boost PDFDocumento5 páginasAutomotion Boost PDFMarcos BenavidesAún no hay calificaciones
- Motor A Pasos JesusDocumento6 páginasMotor A Pasos JesusJesus CarrilloAún no hay calificaciones
- Tutorial de AR - 3Documento5 páginasTutorial de AR - 3Juan FerAún no hay calificaciones
- Practica 5.marcos Mendoza PedroDocumento5 páginasPractica 5.marcos Mendoza PedroPedro MendozaAún no hay calificaciones
- Practica 5.marcos Mendoza PedroDocumento5 páginasPractica 5.marcos Mendoza PedroPedro MendozaAún no hay calificaciones
- Lab 4 DDPDocumento6 páginasLab 4 DDPDAVID ALEJANDRO DURAN CALDERONAún no hay calificaciones
- Tri-Carevita ObstaculosDocumento87 páginasTri-Carevita ObstaculosHector VallejosAún no hay calificaciones
- Tema 3 ArduinoDocumento20 páginasTema 3 ArduinoiapelisaAún no hay calificaciones
- Lab 8 Electronica ADocumento11 páginasLab 8 Electronica AFabrizio ChanaméAún no hay calificaciones
- Practicas Con El Entrenador de Arduino UnoDocumento8 páginasPracticas Con El Entrenador de Arduino Unocabe0282100% (2)
- MCU Ma V4V6 #2 AF3Documento10 páginasMCU Ma V4V6 #2 AF3Miguel RiveraAún no hay calificaciones
- Sistemas DigitalesDocumento22 páginasSistemas DigitalesCarlos JavierAún no hay calificaciones
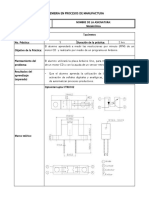
- TaconmetrooDocumento14 páginasTaconmetrooDaniel DGAún no hay calificaciones
- CyDSV EV3Documento8 páginasCyDSV EV3Noe ParedesAún no hay calificaciones
- PRACTICA 5 MecatrónicaDocumento4 páginasPRACTICA 5 MecatrónicaJoselineAún no hay calificaciones
- Alter Informe Lote 11Documento4 páginasAlter Informe Lote 11Chistian SanchezAún no hay calificaciones
- Guia de Practicas 2cDocumento17 páginasGuia de Practicas 2crobinjuda15Aún no hay calificaciones
- Informe Taller ArduinoDocumento6 páginasInforme Taller ArduinoJhojan QuevedoAún no hay calificaciones
- Practicas - Curso ArduinoDocumento36 páginasPracticas - Curso ArduinoJuan ThompsonAún no hay calificaciones
- Carro Controlado Por Bluethot y ArduinoDocumento9 páginasCarro Controlado Por Bluethot y ArduinoWilliam Blanco ArzapaloAún no hay calificaciones
- PosTarea Grupo20Documento17 páginasPosTarea Grupo20saluda207Aún no hay calificaciones
- Microprocesadores Practica 5Documento10 páginasMicroprocesadores Practica 5Lizette BlueAún no hay calificaciones
- AVANCE RELOJ DESPERTADOR MICROCONTROLADORDocumento4 páginasAVANCE RELOJ DESPERTADOR MICROCONTROLADOR4r73m154Aún no hay calificaciones
- Informe de Laboratorio de MicrocontroladoresDocumento7 páginasInforme de Laboratorio de MicrocontroladoresZuniiga AndersonAún no hay calificaciones
- Ing. en Sistemas Computacionales Sistemas ProgramablesDocumento12 páginasIng. en Sistemas Computacionales Sistemas ProgramablesAlejandro MorenoAún no hay calificaciones
- PRÁCTICA 1 Entorno IDE Arduino y ProteusDocumento2 páginasPRÁCTICA 1 Entorno IDE Arduino y Proteusmayelo97Aún no hay calificaciones
- Robot Evita Obstaculos NOVIEMBREDocumento13 páginasRobot Evita Obstaculos NOVIEMBREBerenice SunemAún no hay calificaciones
- Servomecanismos AF6 Programación de Una Tarjeta para Servomotor.Documento12 páginasServomecanismos AF6 Programación de Una Tarjeta para Servomotor.Edwin IsraelAún no hay calificaciones
- Practica 1Documento6 páginasPractica 1JuanMIguelPaezAún no hay calificaciones
- Carro Controlado Por Bluethot y ArduinoDocumento10 páginasCarro Controlado Por Bluethot y ArduinoEfrain Negrete PinedaAún no hay calificaciones
- Manejo Del Puerto SerieDocumento7 páginasManejo Del Puerto SerieEdrei SanchezAún no hay calificaciones
- Especificaciones Técnicas de Coberturas AluzinDocumento2 páginasEspecificaciones Técnicas de Coberturas AluzinJhonathanAún no hay calificaciones
- Guia de Precipitación 02-2016Documento2 páginasGuia de Precipitación 02-2016juanAún no hay calificaciones
- Ácidos Polihidroxicarboxílicos 12Documento2 páginasÁcidos Polihidroxicarboxílicos 12LITZY THAILY JIMENEZ MORAAún no hay calificaciones
- Retraso Mental y su relación con la Demencia a través de la historiaDocumento22 páginasRetraso Mental y su relación con la Demencia a través de la historiaMariu PazAún no hay calificaciones
- Cessna 150Documento5 páginasCessna 150Melissa Del RosalAún no hay calificaciones
- ONU-Guia para Crear Observatorio Urb LocalDocumento47 páginasONU-Guia para Crear Observatorio Urb LocalChaly2kAún no hay calificaciones
- Componentes de Electronicos de RiesgoDocumento4 páginasComponentes de Electronicos de RiesgoRyan Rangel AmadorAún no hay calificaciones
- Upt Práctica 02 Ingeniería SismorresistenteDocumento2 páginasUpt Práctica 02 Ingeniería SismorresistenteDavid ArceAún no hay calificaciones
- Libro Domo Termico Ing. Diego GonzalesDocumento76 páginasLibro Domo Termico Ing. Diego GonzalesCn VickyAún no hay calificaciones
- Medición de Fronteras A 115 KV o 230 KVDocumento2 páginasMedición de Fronteras A 115 KV o 230 KVAnderson Jair Velandia PiraquiveAún no hay calificaciones
- FILOSOFÍA Trabajo ExposiciónDocumento31 páginasFILOSOFÍA Trabajo ExposicióncrisAún no hay calificaciones
- Ematematicas Financieras Ejerccios de Interes SimpDocumento5 páginasEmatematicas Financieras Ejerccios de Interes SimpAngelica Yaneth Diaz LopezAún no hay calificaciones
- Índice de precios unitarios de materiales para proyecto de arquitectura 2013Documento28 páginasÍndice de precios unitarios de materiales para proyecto de arquitectura 2013Adan Barja VelasquezAún no hay calificaciones
- S1 Sistemas TermodinámicosDocumento32 páginasS1 Sistemas TermodinámicosWilder Molina0% (1)
- Comparadores de CaratulaDocumento12 páginasComparadores de CaratulaJhoan MaflaAún no hay calificaciones
- Valvulopatias-tablaDocumento3 páginasValvulopatias-tablaSheryl Lévano DelgadoAún no hay calificaciones
- AmenorreaDocumento7 páginasAmenorreaEmma PaguayAún no hay calificaciones
- Comprencion CuartoDocumento4 páginasComprencion CuartoLesmes Hidalgo CamposAún no hay calificaciones
- Tema 10 y 11 Legislacion - CartagenaDocumento55 páginasTema 10 y 11 Legislacion - CartagenaVerónika Padilla T.Aún no hay calificaciones
- General I Dad DesDocumento23 páginasGeneral I Dad Desanon_828943220Aún no hay calificaciones
- Diez Dias en El Aposento AltoDocumento64 páginasDiez Dias en El Aposento AltoMonica Daliesi ZukowskiAún no hay calificaciones
- Once Catedra PazDocumento4 páginasOnce Catedra PazyessicaAún no hay calificaciones
- Proyecto Final InferencialDocumento31 páginasProyecto Final InferencialEdgar Avila villarrealAún no hay calificaciones
- Clase Práctica 10Documento2 páginasClase Práctica 10correofake09Aún no hay calificaciones
- Cuaderno Caritativa Web 2019Documento17 páginasCuaderno Caritativa Web 2019Antonio Bueno GonzálezAún no hay calificaciones
- Wiac - Info PDF El Sexto Jose Maria Arguedas PRDocumento78 páginasWiac - Info PDF El Sexto Jose Maria Arguedas PREilex Ortiz SuyoAún no hay calificaciones
- Equipo de Control de PozosDocumento26 páginasEquipo de Control de PozosFernando Montes de Oca100% (1)
- Certificado de Análisis de Materia PrimaDocumento2 páginasCertificado de Análisis de Materia PrimaYatzil Cruz ChavezAún no hay calificaciones