También podría gustarte
- Colin Brito - Exámen 3Documento6 páginasColin Brito - Exámen 3Bibiana ReynosoAún no hay calificaciones
- Morin, Edgar - Unir Los ConocimientosDocumento552 páginasMorin, Edgar - Unir Los ConocimientosPatricia Yave100% (10)
- Apuntes de Fresadora Haas (Códigos G Y M) .Documento57 páginasApuntes de Fresadora Haas (Códigos G Y M) .Eduardo100% (2)
- Ejemplo Programacion g81Documento3 páginasEjemplo Programacion g81DanielOrtizAún no hay calificaciones
- Iii Sol Flores Mondragón Iqa Operaciones Ii 2020 IDocumento8 páginasIii Sol Flores Mondragón Iqa Operaciones Ii 2020 IJazmin Flores MondragónAún no hay calificaciones
- Tecnologia para El Control de Los RiesgosDocumento8 páginasTecnologia para El Control de Los RiesgosNeilMartinezFernandezAún no hay calificaciones
- Codigos de Programacio TornoDocumento26 páginasCodigos de Programacio Tornovictor elias quintero tobarAún no hay calificaciones
- ACT-OMCN - Programacion 2 Torno - 2024Documento2 páginasACT-OMCN - Programacion 2 Torno - 2024Fernando Pastén FernándezAún no hay calificaciones
- ObjetivosDocumento10 páginasObjetivosJoel JimenezAún no hay calificaciones
- Codigo M y G CNCDocumento4 páginasCodigo M y G CNCJORGE ALEJANDRO RAMIREZ AQUINO100% (1)
- Funcion G25 CNCDocumento22 páginasFuncion G25 CNCSamir B. VerasteguiAún no hay calificaciones
- Codigo IsoDocumento36 páginasCodigo IsoliberfustaAún no hay calificaciones
- Codigos GDocumento44 páginasCodigos GAnton Repka100% (1)
- Clase CNCDocumento41 páginasClase CNCJUAN JESÚS RAMOS VEGAAún no hay calificaciones
- CodigoDocumento10 páginasCodigoDavid DsvAún no hay calificaciones
- Programacion FagorDocumento10 páginasProgramacion FagorEulalio LopezAún no hay calificaciones
- GUIA PARA CENTRO DE MAQUINADO (Autoguardado)Documento23 páginasGUIA PARA CENTRO DE MAQUINADO (Autoguardado)os_astarotAún no hay calificaciones
- CNC FresaDocumento31 páginasCNC FresaaamarosaAún no hay calificaciones
- Funcion GDocumento10 páginasFuncion GwrdnAún no hay calificaciones
- Manual de ProgramacionDocumento153 páginasManual de ProgramacionJosue Palacin100% (1)
- Interpolación CircularDocumento8 páginasInterpolación CircularMecanizado SenaAún no hay calificaciones
- CLASE 5 CNCDocumento6 páginasCLASE 5 CNCCamiloCienfuegosAún no hay calificaciones
- Apuntes-Torno-Cnc - PROBLEMASDocumento24 páginasApuntes-Torno-Cnc - PROBLEMASSebastian AlarconAún no hay calificaciones
- Curso de CNCDocumento45 páginasCurso de CNCNicolás Maquiavelo100% (2)
- Ejercicios de Programacion en Torno CNCDocumento17 páginasEjercicios de Programacion en Torno CNCAntonio AcostaAún no hay calificaciones
- Practicas Introduccion CNCDocumento23 páginasPracticas Introduccion CNCMartinHarrisAún no hay calificaciones
- CNC FresaDocumento11 páginasCNC FresaJean Alexandre Quispe FloresAún no hay calificaciones
- 1 EjerciciosDocumento11 páginas1 EjerciciosDaphne Cueva ValleAún no hay calificaciones
- Programación ManualDocumento25 páginasProgramación ManualSaul Serrano CahuantziAún no hay calificaciones
- DESPLAZAMIdddDocumento6 páginasDESPLAZAMIdddlololo2354Aún no hay calificaciones
- Ciclo Fijo de Desbaste en Eje Z o transversal-FUSCODocumento7 páginasCiclo Fijo de Desbaste en Eje Z o transversal-FUSCOIvan FuscoAún no hay calificaciones
- G01 Interpolacion LinealDocumento24 páginasG01 Interpolacion Linealhiram54Aún no hay calificaciones
- Catalogo HaasDocumento11 páginasCatalogo HaasGarcia Gonzalez BenignoAún no hay calificaciones
- Programación CNCDocumento35 páginasProgramación CNCAgustín Soldano100% (1)
- MANUAL CODIGO G y MDocumento59 páginasMANUAL CODIGO G y MSylvhiia PerezAún no hay calificaciones
- Ejemplo de Programacion para Torno CNCDocumento3 páginasEjemplo de Programacion para Torno CNCLuis Miguel Verde BencomoAún no hay calificaciones
- CNC Comandos EspañolDocumento9 páginasCNC Comandos Españolnelson D.Aún no hay calificaciones
- Anexo Manual Fanuc Torno CNCDocumento13 páginasAnexo Manual Fanuc Torno CNCarturo_23eAún no hay calificaciones
- Apuntes Torno CNCDocumento24 páginasApuntes Torno CNCSuli ZgzAún no hay calificaciones
- Curso CNC CM DYNADocumento56 páginasCurso CNC CM DYNAPriscilaPalaciosAún no hay calificaciones
- Guia Ape 8Documento9 páginasGuia Ape 8Bryan AcostaAún no hay calificaciones
- CODIGOSDocumento11 páginasCODIGOSEdith SepulvedaAún no hay calificaciones
- Maria de La Luz Casillas Cano, 1830366, 602Documento8 páginasMaria de La Luz Casillas Cano, 1830366, 602Luz CasillasAún no hay calificaciones
- CodigosDocumento57 páginasCodigosJose De SantiagoAún no hay calificaciones
- Programacion Del 4 Eje (Eje A)Documento13 páginasProgramacion Del 4 Eje (Eje A)Sebastian MonsalveAún no hay calificaciones
- Guia de Referencia CNC Del Operador.Documento67 páginasGuia de Referencia CNC Del Operador.Alberto RomeroAún no hay calificaciones
- Ejemplo Pieza Torneado CNC Con WINUNISOFT PDFDocumento5 páginasEjemplo Pieza Torneado CNC Con WINUNISOFT PDFarnaldodsAún no hay calificaciones
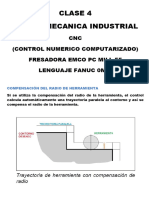
- CLASE 4 CNCDocumento5 páginasCLASE 4 CNCCamiloCienfuegosAún no hay calificaciones
- Programacion Codigo GDocumento5 páginasProgramacion Codigo GEdwin PozoAún no hay calificaciones
- Procesos de Manufactura I Programación para Máquinas CNC: Profesor: Bastian Vergara Gallegos Correo: Bvergara@ubiobio - CLDocumento18 páginasProcesos de Manufactura I Programación para Máquinas CNC: Profesor: Bastian Vergara Gallegos Correo: Bvergara@ubiobio - CLBrhayams Gacitua GuiñezAún no hay calificaciones
- Ciclos de Taladrado G81, G82 Y G83: María de La Luz Casillas Cano, 1830366, 602Documento10 páginasCiclos de Taladrado G81, G82 Y G83: María de La Luz Casillas Cano, 1830366, 602Luz CasillasAún no hay calificaciones
- Curso Fanuc 2015-2016Documento40 páginasCurso Fanuc 2015-2016Cristian Rojas Ulloa100% (2)
- Curso Torno RoscaDocumento16 páginasCurso Torno Roscaluislobo10Aún no hay calificaciones
- LAB. ING. de Manufactura Aisitida Con CNCDocumento11 páginasLAB. ING. de Manufactura Aisitida Con CNCJuanMancoAún no hay calificaciones
- Practica 7 ReporteDocumento4 páginasPractica 7 ReporteGalilea BandaAún no hay calificaciones
- Ejemplos TornoDocumento16 páginasEjemplos TornoLalo VarelaAún no hay calificaciones
- Tarea 1 Fresadora 2023Documento3 páginasTarea 1 Fresadora 2023Jhonny Jhoel Ccanto GuadalupeAún no hay calificaciones
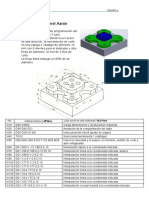
- Programacion de AlfilDocumento5 páginasProgramacion de AlfilJohan Christhofer Armas ValenciaAún no hay calificaciones
- 5 Torno CNCDocumento3 páginas5 Torno CNCGonzalo CarnevaleAún no hay calificaciones
- Manual de Comandos para ManufacturaDocumento24 páginasManual de Comandos para ManufacturaLizbeth LopezAún no hay calificaciones
- G76 - Rosca Paralela PDFDocumento1 páginaG76 - Rosca Paralela PDFAlucard SanzAún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Consultivo 19ABR24Documento5 páginasConsultivo 19ABR24CamiloCienfuegosAún no hay calificaciones
- Cuaderno de ComunicacionDocumento35 páginasCuaderno de ComunicacionCamiloCienfuegosAún no hay calificaciones
- Llaves Combinadas y FijasDocumento14 páginasLlaves Combinadas y FijasCamiloCienfuegosAún no hay calificaciones
- CLASE 3 CNCDocumento5 páginasCLASE 3 CNCCamiloCienfuegosAún no hay calificaciones
- MT-1965-2022 Termometro Infrarrojo 1965 Sanwin SW550CDocumento2 páginasMT-1965-2022 Termometro Infrarrojo 1965 Sanwin SW550CANDRES LLAGUARIMAY CHIPANAAún no hay calificaciones
- Reporte 5 Control ElectromecanicoDocumento8 páginasReporte 5 Control ElectromecanicoArturo Rivera HernandezAún no hay calificaciones
- Informe Final - Grupo 3Documento12 páginasInforme Final - Grupo 3Rosie SalazarAún no hay calificaciones
- Caso. Bob KnowltonDocumento3 páginasCaso. Bob KnowltonRicardo ParedesAún no hay calificaciones
- Informe 1 Propiedades de Los Gases y Determinación de Masas MolaresDocumento16 páginasInforme 1 Propiedades de Los Gases y Determinación de Masas MolaresCATHERINE MARQUEZ TILANOAún no hay calificaciones
- Laboratorio MFL Propiedades Solidos y LiquidoDocumento8 páginasLaboratorio MFL Propiedades Solidos y LiquidoDaniloAún no hay calificaciones
- Fisica en Procesos Productivos Tarea 3 Pedro AlfaroDocumento7 páginasFisica en Procesos Productivos Tarea 3 Pedro AlfaroPedro Alfaro CuelloAún no hay calificaciones
- Lubricacion en Motores ElectricosDocumento9 páginasLubricacion en Motores ElectricosJhonatan MontalvoAún no hay calificaciones
- Ciencias Basicas Lab 2Documento12 páginasCiencias Basicas Lab 2Fabrizio AmayaAún no hay calificaciones
- Clase 16 IntegralDocumento11 páginasClase 16 IntegralJhon Edison Bravo BuitragoAún no hay calificaciones
- Conceptos Básicos Y Acciones de Control PidDocumento60 páginasConceptos Básicos Y Acciones de Control Pidjaime ruiz de medinaAún no hay calificaciones
- Proyecto Aña Cua Central Hidroeléctrica YacyretáDocumento291 páginasProyecto Aña Cua Central Hidroeléctrica YacyretáAlan VeraAún no hay calificaciones
- Movimiento Circular UniformeDocumento5 páginasMovimiento Circular UniformeCarlos Alberto GonzalezAún no hay calificaciones
- Materiales CompuestosDocumento42 páginasMateriales CompuestosAdriana Camacho100% (1)
- Presentación 1 Introducción TransferenciaDocumento17 páginasPresentación 1 Introducción TransferenciabAún no hay calificaciones
- GUIA 1ER DEPARTAMENTAL QUIMICA Aplicada IPNDocumento25 páginasGUIA 1ER DEPARTAMENTAL QUIMICA Aplicada IPNJose Luis Mtz100% (1)
- Pract 2 Determinacion Proteina UV-VisDocumento11 páginasPract 2 Determinacion Proteina UV-VisSherezada AranzazúAún no hay calificaciones
- CALENTADOR ELÉCTRICO DE DEPÓSITO 76L 127V RHEEM PERFORMANCE 2 SERVICIOS The Home Depot MéxicoDocumento1 páginaCALENTADOR ELÉCTRICO DE DEPÓSITO 76L 127V RHEEM PERFORMANCE 2 SERVICIOS The Home Depot MéxicoAbelardo HerediaAún no hay calificaciones
- Serie de Reactividad de Los Metales: Litio Li Potasio Bario Calcio Sodio Magnesio Aluminio K Ba Ca Na MG AlDocumento1 páginaSerie de Reactividad de Los Metales: Litio Li Potasio Bario Calcio Sodio Magnesio Aluminio K Ba Ca Na MG AlDarik Edison Yupanqui YautibugAún no hay calificaciones
- Batimetría en RíosDocumento94 páginasBatimetría en RíosWillian Fredy Peñasco ApazaAún no hay calificaciones
- OLAMSA-SSOMA-F-036 PETAR - TRABAJOS ELÉCTRICOS - Version 2Documento1 páginaOLAMSA-SSOMA-F-036 PETAR - TRABAJOS ELÉCTRICOS - Version 2Dulce Azucena Trujillo RomeroAún no hay calificaciones
- Requisito Generales para Se 138kvDocumento93 páginasRequisito Generales para Se 138kvRony RodriguezAún no hay calificaciones
- Evaluacion Fisica McuDocumento2 páginasEvaluacion Fisica McuYulian RzrzAún no hay calificaciones
- Laboratorio 9 Resistividad Eléctrica.Documento13 páginasLaboratorio 9 Resistividad Eléctrica.STEEVEN ARMANDO CASANOVA REYES100% (1)
- Estructura AtomicaDocumento39 páginasEstructura AtomicaJESUS ROLANDO FIGUEROA CAMPANAAún no hay calificaciones
- Clase 11Documento67 páginasClase 11Juan Pablo OrozcoAún no hay calificaciones