También podría gustarte
- La Fotogrametría DefiniciónDocumento4 páginasLa Fotogrametría DefiniciónLili LacAún no hay calificaciones
- FotogrametriaDocumento5 páginasFotogrametriaSaul TorresAún no hay calificaciones
- Informe Fotogrametria 2Documento15 páginasInforme Fotogrametria 2PATRIK MAYCOL CAYCHO CLEMENTEAún no hay calificaciones
- Historia de La Fotogrametria 1Documento5 páginasHistoria de La Fotogrametria 1SANDRA MILENA JUNCO PORRASAún no hay calificaciones
- FotogrametriaDocumento5 páginasFotogrametriaAlexander JaénAún no hay calificaciones
- FotogrametríaDocumento5 páginasFotogrametríaROBINSON YONI CONDORI CONDORIAún no hay calificaciones
- Historia - Parte 02Documento5 páginasHistoria - Parte 02SANDRA MILENA JUNCO PORRASAún no hay calificaciones
- Funadementos FotogrametriaDocumento7 páginasFunadementos FotogrametriaJared Melvin Palomino YupanquiAún no hay calificaciones
- InterpretacionDocumento100 páginasInterpretacionRogger Eligio Barrientos LipaAún no hay calificaciones
- 1.3-. Historia de La Fotogrametría y Su Aplicación Al Patrimonio ArqueológicoDocumento8 páginas1.3-. Historia de La Fotogrametría y Su Aplicación Al Patrimonio ArqueológicoSergio GomezAún no hay calificaciones
- Historia y Definición de La FotogrametríaDocumento12 páginasHistoria y Definición de La FotogrametríaOlivares VelasquezAún no hay calificaciones
- Fotogrametrí1 01Documento4 páginasFotogrametrí1 01Nelson Delgado QuispeAún no hay calificaciones
- Fotogrametría: definición, evolución e instrumentos básicosDocumento6 páginasFotogrametría: definición, evolución e instrumentos básicosFidencio Gomez GarciaAún no hay calificaciones
- PPT FotogrametriaDocumento46 páginasPPT FotogrametriaDiego PastorAún no hay calificaciones
- Historia de La FotogrametriaDocumento7 páginasHistoria de La FotogrametriacrisleicoAún no hay calificaciones
- FotogrametríaDocumento3 páginasFotogrametríaAnonymous 0OSl3pA9Aún no hay calificaciones
- Clase #1 - Introducción A La FotogrametriaDocumento42 páginasClase #1 - Introducción A La Fotogrametriaedward10r100% (1)
- 1851 Aimé LaussedatDocumento5 páginas1851 Aimé Laussedatjery wellAún no hay calificaciones
- Manual Fotogrametria Conceptos Basicos - Procesamiento de Imagenes AereasDocumento52 páginasManual Fotogrametria Conceptos Basicos - Procesamiento de Imagenes AereasRUBEN ELI ESTRADA CHUNGAAún no hay calificaciones
- Fotogrametría: Generalidades y evolución históricaDocumento5 páginasFotogrametría: Generalidades y evolución históricajery wellAún no hay calificaciones
- Taller 1 FotogrametriaDocumento14 páginasTaller 1 FotogrametriaLeidy BenavidesAún no hay calificaciones
- FOTOGRAMETRIADocumento7 páginasFOTOGRAMETRIAElkin G. MendezAún no hay calificaciones
- RESTITUIDORESDocumento12 páginasRESTITUIDORESDiego Felipe Rodriguez Morales100% (4)
- Ensayo de La Importancia de La FotogrametriaDocumento7 páginasEnsayo de La Importancia de La FotogrametriaMarcos Leon de leonAún no hay calificaciones
- Introducción, y Antecedentes de La Fotogrametría PDFDocumento23 páginasIntroducción, y Antecedentes de La Fotogrametría PDFPablo Carlos Huambachano Koc-LemAún no hay calificaciones
- Monografia Topografia Tarea 2Documento29 páginasMonografia Topografia Tarea 2Nelva Luisa Placido VenancioAún no hay calificaciones
- Historia de la fotogrametría y teledetecciónDocumento4 páginasHistoria de la fotogrametría y teledetecciónOrlando Diaz M.Aún no hay calificaciones
- FOTOGRAMETRIADocumento12 páginasFOTOGRAMETRIAfranklin CMAún no hay calificaciones
- Proyecto Final Fotogrametria (Grupo3)Documento17 páginasProyecto Final Fotogrametria (Grupo3)Max GonzalesAún no hay calificaciones
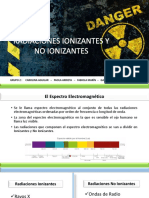
- Origen de La Fotogrametría y Espectro ElectromagnéticoDocumento6 páginasOrigen de La Fotogrametría y Espectro ElectromagnéticoDaniela Montes SolerAún no hay calificaciones
- Fotogrametria 1 Nestor Ivan Garcia MotatoDocumento22 páginasFotogrametria 1 Nestor Ivan Garcia MotatoMauricio Candiales0% (1)
- Historia de La FotogrametríaDocumento19 páginasHistoria de La FotogrametríalesmesAún no hay calificaciones
- FotogrametriaDocumento22 páginasFotogrametriaEdson HeadringtonAún no hay calificaciones
- Historia y evolución de la fotogrametría a través de las etapas analógica, analítica, digital y de gran formatoDocumento7 páginasHistoria y evolución de la fotogrametría a través de las etapas analógica, analítica, digital y de gran formatojose estiven villavicencioAún no hay calificaciones
- Informe de FotogrametriaDocumento33 páginasInforme de Fotogrametriahectorfranck0% (1)
- Clase 01 - Introducción A La FotogrametríaDocumento9 páginasClase 01 - Introducción A La FotogrametríaCristina Chávez MayoAún no hay calificaciones
- Definición FotogrametríaDocumento103 páginasDefinición FotogrametríaDiego Fabian RodriguezAún no hay calificaciones
- Introducción, y Antecedentes de La FotogrametríaDocumento23 páginasIntroducción, y Antecedentes de La FotogrametríaPercy Gian Marco Caceres VilcaAún no hay calificaciones
- Fotogrametria - Grupo 2Documento24 páginasFotogrametria - Grupo 2Vizcarra ShartonAún no hay calificaciones
- TrabajoDocumento36 páginasTrabajoJared Melvin Palomino YupanquiAún no hay calificaciones
- Sensores RemotosDocumento12 páginasSensores RemotosALEJANDRA PENA GUERREROAún no hay calificaciones
- Equipos Basicos de La TopografiaDocumento19 páginasEquipos Basicos de La TopografiaROSARIOAún no hay calificaciones
- Fotogrametria (Geomatica)Documento2 páginasFotogrametria (Geomatica)alex fabianAún no hay calificaciones
- FotogrametríaDocumento15 páginasFotogrametríafdAún no hay calificaciones
- Material de Apoyo Sensores RemotosDocumento23 páginasMaterial de Apoyo Sensores RemotosjoseAún no hay calificaciones
- Exposicion de TeledeteccionDocumento113 páginasExposicion de TeledeteccionPierre Moro VigoAún no hay calificaciones
- Tarea 1 - Lorena SucreDocumento26 páginasTarea 1 - Lorena SucreDavid Moises Molina GonzalezAún no hay calificaciones
- INFORME - Fotogametria - InternetDocumento18 páginasINFORME - Fotogametria - InternetIvonneRoJasDiazAún no hay calificaciones
- Orígenes y desarrollo de la FotogrametríaDocumento150 páginasOrígenes y desarrollo de la FotogrametríaoadmseAún no hay calificaciones
- Antecedentes Historicos de La FotogrametriaDocumento2 páginasAntecedentes Historicos de La FotogrametriaJavier SanchézAún no hay calificaciones
- Sensor ModisDocumento25 páginasSensor ModisDavidSaboyaAún no hay calificaciones
- Historia y evolución de la fotogrametría desde sus inicios hasta la actualidad digitalDocumento13 páginasHistoria y evolución de la fotogrametría desde sus inicios hasta la actualidad digitalAndres GonzalezAún no hay calificaciones
- Historia de la percepción remota y su aplicación en ingeniería civilDocumento14 páginasHistoria de la percepción remota y su aplicación en ingeniería civilSandro Venero SonccoAún no hay calificaciones
- Monografía, La Fotogrametría Arquitectural Digital y Sus AplicacionesDocumento70 páginasMonografía, La Fotogrametría Arquitectural Digital y Sus AplicacionesRoger Tuesta100% (1)
- Manual de FotogrametríaDocumento42 páginasManual de FotogrametríaEdgar ramAún no hay calificaciones
- Fotogrametría terrestre: introducción a su historia y métodosDocumento6 páginasFotogrametría terrestre: introducción a su historia y métodosKevin Ramirez UrculloAún no hay calificaciones
- Trabajo PracticoDocumento13 páginasTrabajo PracticoKevin Ramirez UrculloAún no hay calificaciones
- Geomática Tecnologías De Punta: 1ª EdiciónDe EverandGeomática Tecnologías De Punta: 1ª EdiciónCalificación: 4 de 5 estrellas4/5 (3)
- Esparza Fernanda TAREA-No 1Documento16 páginasEsparza Fernanda TAREA-No 1Fer EsparzaAún no hay calificaciones
- Resuelto TasasruidosDocumento13 páginasResuelto Tasasruidosshirley guzmanAún no hay calificaciones
- Irt-01-Procedimiento Inspeccion TermografiaDocumento22 páginasIrt-01-Procedimiento Inspeccion Termografiadaniel sanchezAún no hay calificaciones
- Catalogo Cierra Puertas-Slider y ParrillaDocumento118 páginasCatalogo Cierra Puertas-Slider y Parrillajean23arteagaAún no hay calificaciones
- MOTORES RENDER 3D MAX VRAYDocumento22 páginasMOTORES RENDER 3D MAX VRAYMj JiAún no hay calificaciones
- Generalidades Radiaciones Ionizantes y No IonizantesDocumento25 páginasGeneralidades Radiaciones Ionizantes y No IonizantesGilbert GuzmanAún no hay calificaciones
- Fluorescencia de ClorofilasDocumento23 páginasFluorescencia de ClorofilasLeticia LageAún no hay calificaciones
- PreciosDocumento20 páginasPreciosIGNACIO Peréz PerézAún no hay calificaciones
- Curso de fotografía inicial - La luz, materia prima de la fotografíaDocumento9 páginasCurso de fotografía inicial - La luz, materia prima de la fotografíaPaola QuevedoAún no hay calificaciones
- La Radiologia DigitalDocumento2 páginasLa Radiologia DigitalJaviera Gotuzzo CarrascoAún no hay calificaciones
- END por rayos X en ingeniería geológicaDocumento11 páginasEND por rayos X en ingeniería geológicaPedro Vasquez AcevedoAún no hay calificaciones
- Taller-5 OpticaGeom PDFDocumento4 páginasTaller-5 OpticaGeom PDFJavier Eduardo Hincapie LenisAún no hay calificaciones
- Guía para El Empleo de Visores Nocturnos Térmicos y Sistema de PunteriaDocumento29 páginasGuía para El Empleo de Visores Nocturnos Térmicos y Sistema de Punterialuca ardenziAún no hay calificaciones
- Informe 7 Laboratorio de FísicaDocumento8 páginasInforme 7 Laboratorio de FísicaMauricio Nova Duran100% (1)
- El Arte de La Fotografia en Blanco y NegroDocumento117 páginasEl Arte de La Fotografia en Blanco y NegroCorina100% (6)
- Redes de Nanocomunicación Inalámbrica para Nanotecnología en El Cuerpo HumanoDocumento16 páginasRedes de Nanocomunicación Inalámbrica para Nanotecnología en El Cuerpo HumanoALVINAún no hay calificaciones
- Cuaderno 2Documento7 páginasCuaderno 2Nicole Flores GenebrozoAún no hay calificaciones
- Color y semiótica: una perspectivaDocumento18 páginasColor y semiótica: una perspectivaSynergiAún no hay calificaciones
- Higiene Industrial - Check-List - Iluminacion y ColorDocumento5 páginasHigiene Industrial - Check-List - Iluminacion y ColorafernauboneAún no hay calificaciones
- Óptica Problemas lentes espejos refracción índiceDocumento2 páginasÓptica Problemas lentes espejos refracción índicealejandraardilamAún no hay calificaciones
- SensoresFotoeléctricosTiposCaracterísticasDocumento17 páginasSensoresFotoeléctricosTiposCaracterísticasJhimmy Jhoel Crisostomo PomaAún no hay calificaciones
- Tipos de pérdida visual y sus causasDocumento4 páginasTipos de pérdida visual y sus causasLuciano CoronelAún no hay calificaciones
- Cerebro, Gran Inventador de MentirasDocumento121 páginasCerebro, Gran Inventador de MentirasEuro MurziAún no hay calificaciones
- Apuntes de Energia Solar Dpto Energia Electrica y Energetica Universidad de Cantabria PDFDocumento242 páginasApuntes de Energia Solar Dpto Energia Electrica y Energetica Universidad de Cantabria PDFEduardo Alberto Fiadino100% (1)
- Riesgos laborales: agentes químicos y físicosDocumento34 páginasRiesgos laborales: agentes químicos y físicosvanessa guilarteAún no hay calificaciones
- Fosnova Led CatalegDocumento418 páginasFosnova Led Cataleglada1119Aún no hay calificaciones
- Lámpara Appasamy AIA-11 Manual de Usuario y Servicio TecnicoDocumento35 páginasLámpara Appasamy AIA-11 Manual de Usuario y Servicio TecnicoalejandraAún no hay calificaciones
- Introduccion A La Magnificacion en Odontología - Vidal Tudela PDFDocumento32 páginasIntroduccion A La Magnificacion en Odontología - Vidal Tudela PDFJorge Montes de Oca0% (1)
- Caracterización microscópica de minerales en ShalipaycoDocumento138 páginasCaracterización microscópica de minerales en ShalipaycoMaricarmen Buiza MuñozAún no hay calificaciones