También podría gustarte
- Pets Manejo Y Operación de Densímetro Nuclear PortátilDocumento42 páginasPets Manejo Y Operación de Densímetro Nuclear PortátiloscarAún no hay calificaciones
- SI Elena Rupérez Cerezo Jun12Documento69 páginasSI Elena Rupérez Cerezo Jun12ElsyHerreraSantAún no hay calificaciones
- (PDS) Lab 05 DTFT 19 IIDocumento12 páginas(PDS) Lab 05 DTFT 19 IIjaneth rodriguez0% (1)
- Lab 04 Pds Resp Frec 11 II ADocumento6 páginasLab 04 Pds Resp Frec 11 II Avikingo5Aún no hay calificaciones
- Practica4 - 1 - 1 - Carlos Jesus Zuñiga AguilarDocumento7 páginasPractica4 - 1 - 1 - Carlos Jesus Zuñiga AguilarCarlillos J. ZuñigaAún no hay calificaciones
- Tranformada de FourierDocumento113 páginasTranformada de FourierWILLIAM RUIZ CHAMPI PUMAAún no hay calificaciones
- Diseño TecnológicoDocumento13 páginasDiseño TecnológicoLeslie RamirezAún no hay calificaciones
- 2012 - Practica Filtro Digital en LabVIEWDocumento9 páginas2012 - Practica Filtro Digital en LabVIEWEdwar ZamoraAún no hay calificaciones
- Aplicaciones de Filtros Digitales Tema11Documento34 páginasAplicaciones de Filtros Digitales Tema11Hamner D Ballesteros JarabaAún no hay calificaciones
- Transformada de Fourier en Modo RadixDocumento8 páginasTransformada de Fourier en Modo RadixSimon Bedoya ValenciaAún no hay calificaciones
- P05 Transformada Discreta de FourierDocumento10 páginasP05 Transformada Discreta de FourierAlan MarquezAún no hay calificaciones
- Investigación de La Unidad 6, Métodos Numéricos (Series de Fourier)Documento7 páginasInvestigación de La Unidad 6, Métodos Numéricos (Series de Fourier)Jesús Alexander MejíazAún no hay calificaciones
- FFT Campos SelemDocumento5 páginasFFT Campos SelemSel ArsAún no hay calificaciones
- Paso 3 - Harold DiazDocumento10 páginasPaso 3 - Harold DiazXergio LmusAún no hay calificaciones
- Lab 04 Serie Fourier 14 IDocumento6 páginasLab 04 Serie Fourier 14 IAlv Andre MGAún no hay calificaciones
- Brigada 3 Practica5 Grupo 15Documento11 páginasBrigada 3 Practica5 Grupo 15Alexis De León LópezAún no hay calificaciones
- Informe - Tema 03Documento24 páginasInforme - Tema 03Raul Depaz NuñezAún no hay calificaciones
- Exposicion de Analisis Espectral Grupo 4Documento11 páginasExposicion de Analisis Espectral Grupo 4Fernando AtalayaAún no hay calificaciones
- Señales y Sistemas Tarea 2Documento10 páginasSeñales y Sistemas Tarea 2EsnerAún no hay calificaciones
- Lab de FMDocumento29 páginasLab de FMIsaac SaturnoAún no hay calificaciones
- Analisis y Serie de FourierDocumento9 páginasAnalisis y Serie de FourierNico MartinAún no hay calificaciones
- Tarea 2 Señales Y Sistemas Harol Grisson MoyaDocumento18 páginasTarea 2 Señales Y Sistemas Harol Grisson MoyaAndres ManosalvaAún no hay calificaciones
- Trabajo Final de Matemáticas AplicadaDocumento19 páginasTrabajo Final de Matemáticas AplicadaGuitarristx dE LeYendxAún no hay calificaciones
- FourierDocumento14 páginasFourierNimrod Ángel Rojas MuñozAún no hay calificaciones
- Lab 04 Serie Fourier 13 IIDocumento8 páginasLab 04 Serie Fourier 13 IIGabriel Crispin SilvaAún no hay calificaciones
- Filtro Digital CarrilloDocumento32 páginasFiltro Digital CarrilloFREDERICK QUISPE HIPOLITOAún no hay calificaciones
- Plantilla Informe LaboratorioDocumento4 páginasPlantilla Informe Laboratoriojuan pabloAún no hay calificaciones
- Practica #3Documento14 páginasPractica #3Jordan Moreira ValdezAún no hay calificaciones
- Tratamiento Digital de SeñalesDocumento52 páginasTratamiento Digital de SeñalesGiovanny OrtizAún no hay calificaciones
- FourierDocumento34 páginasFourierWilliam MoretaAún no hay calificaciones
- Aproximación funciones FourierDocumento35 páginasAproximación funciones FourieraldoAún no hay calificaciones
- Trabajo Transformadas de Fourier ListoDocumento4 páginasTrabajo Transformadas de Fourier ListoPaulina JimenezAún no hay calificaciones
- Lab Nº6 - Respuesta en Frecuencia - 2021 - ParDocumento3 páginasLab Nº6 - Respuesta en Frecuencia - 2021 - ParEsteban MontesAún no hay calificaciones
- Lab Nº6 - Respuesta en Frecuencia - 2021 - ParDocumento3 páginasLab Nº6 - Respuesta en Frecuencia - 2021 - ParEsteban MontesAún no hay calificaciones
- 2.2 Series de Fourier ExponencialesDocumento14 páginas2.2 Series de Fourier ExponencialesZAMUDIO MARQUEZ WILLIAM RAMIRO INGENIER�A EN TECNOLOG�AS DE LA INFORMACI�N Y COMUNICACIONESAún no hay calificaciones
- Informe Comunicacion AnalogicaDocumento17 páginasInforme Comunicacion AnalogicaDarwin Dario Uscacchi ValenciaAún no hay calificaciones
- Aplicaciones de series matemáticas (potencia, Taylor, Laurent, FourierDocumento10 páginasAplicaciones de series matemáticas (potencia, Taylor, Laurent, FourierJoswar Rengifo MartinezAún no hay calificaciones
- Practica 6 Ads 862Documento15 páginasPractica 6 Ads 862Anonymous oy7GSEAún no hay calificaciones
- Aplicaciones de La Serie de FourierDocumento6 páginasAplicaciones de La Serie de FourierDAVID ALBERTO MARTINEZ PEREZAún no hay calificaciones
- Trabajo Final Unidad 5 Introduccion A Las Series de Fourier 1Documento14 páginasTrabajo Final Unidad 5 Introduccion A Las Series de Fourier 1Nicolás MéndezAún no hay calificaciones
- La Transformada de Fourier InformeDocumento13 páginasLa Transformada de Fourier InformePedro Arturo Peter CarmonaAún no hay calificaciones
- Serie Fourier Ecuaciones DiferencialesDocumento24 páginasSerie Fourier Ecuaciones DiferencialesDiego TotoAún no hay calificaciones
- Practica Convolucion Lineal y CircularDocumento6 páginasPractica Convolucion Lineal y CircularSevy Tom ZoriuqAún no hay calificaciones
- Lab Nº6 - Respuesta en Frecuencia - 2020 - ParDocumento3 páginasLab Nº6 - Respuesta en Frecuencia - 2020 - ParBryan Mendoza ChalcoAún no hay calificaciones
- Espectro de Frecuencia DFT SeñalesDocumento3 páginasEspectro de Frecuencia DFT SeñalesAnita Rivera100% (1)
- Tarea 1 - Unidad 1Documento10 páginasTarea 1 - Unidad 1GerardoAún no hay calificaciones
- Practica 3 Transformada de Fourier en Tiempo DiscretoDocumento5 páginasPractica 3 Transformada de Fourier en Tiempo DiscretoArmando CajahuaringaAún no hay calificaciones
- Prac 2 Analogicas Chavez MalenaDocumento9 páginasPrac 2 Analogicas Chavez MalenaFernanda LopezAún no hay calificaciones
- Lab8 PdsDocumento13 páginasLab8 PdsAdrian NarvaezAún no hay calificaciones
- Análisis de Fourier para L Tratamiento de SeñalesDocumento39 páginasAnálisis de Fourier para L Tratamiento de SeñalesNéstor Lopez PrincipeAún no hay calificaciones
- Transdormada de FouerierDocumento3 páginasTransdormada de FouerierAmando AcostaAún no hay calificaciones
- DSP Lab 7Documento4 páginasDSP Lab 7Luis Fernando RiveraAún no hay calificaciones
- Análisis de Fourier o Análisis ArmónicoDocumento16 páginasAnálisis de Fourier o Análisis ArmónicoJuan Carlos Albuja JácomeAún no hay calificaciones
- Tarea 2 Señales en El Dominio de La FrecuenciaDocumento14 páginasTarea 2 Señales en El Dominio de La Frecuenciaroger betancourth100% (1)
- Señales (1) - 1Documento7 páginasSeñales (1) - 1moises antolinezAún no hay calificaciones
- 5to - SyS - LAB - N6 - 1 - 2023Documento6 páginas5to - SyS - LAB - N6 - 1 - 2023Litos Car RritoAún no hay calificaciones
- Diseño FIR MATLABDocumento72 páginasDiseño FIR MATLABYorcy A. DiazAún no hay calificaciones
- Serie de Fourier y la ecuación de la cuerda vibranteDocumento33 páginasSerie de Fourier y la ecuación de la cuerda vibranteYolanda Otoya CelisAún no hay calificaciones
- Difusión anisotrópica: Mejora del análisis de imágenes mediante difusión anisotrópicaDe EverandDifusión anisotrópica: Mejora del análisis de imágenes mediante difusión anisotrópicaAún no hay calificaciones
- Taller LAB 14Documento2 páginasTaller LAB 14Sebastian VargasAún no hay calificaciones
- Métodos de integraciónDocumento13 páginasMétodos de integraciónSebastian VargasAún no hay calificaciones
- LaboratorioDocumento2 páginasLaboratorioSebastian VargasAún no hay calificaciones
- ID Caja Tipo Titulo Subtitulo EditorialDocumento3 páginasID Caja Tipo Titulo Subtitulo EditorialSebastian VargasAún no hay calificaciones
- Nuevo fenómeno de fuerza imaginaria en la luzDocumento8 páginasNuevo fenómeno de fuerza imaginaria en la luzSebastian VargasAún no hay calificaciones
- Informe 2 ElectroEncefaloGramaDocumento8 páginasInforme 2 ElectroEncefaloGramaSebastian VargasAún no hay calificaciones
- Separadores Feria PartidosDocumento4 páginasSeparadores Feria PartidosSebastian VargasAún no hay calificaciones
- Los Ingredientes Del PrecioDocumento1 páginaLos Ingredientes Del PrecioSebastian VargasAún no hay calificaciones
- Tarea EmcDocumento6 páginasTarea EmcSebastian VargasAún no hay calificaciones
- Informe Laboratorio P ArquímedesDocumento7 páginasInforme Laboratorio P ArquímedesSebastian VargasAún no hay calificaciones
- Vargas Alfonso, Sanchez, Murillo. Lab BernoulliDocumento5 páginasVargas Alfonso, Sanchez, Murillo. Lab BernoulliSebastian VargasAún no hay calificaciones
- Informe Laboratorio Continuidad y BernoulliDocumento4 páginasInforme Laboratorio Continuidad y BernoulliSebastian VargasAún no hay calificaciones
- Informe Laboratorio P ArquímedesDocumento7 páginasInforme Laboratorio P ArquímedesSebastian VargasAún no hay calificaciones
- ProtocoloDocumento2 páginasProtocoloSebastian VargasAún no hay calificaciones
- Laboratorio#3Documento2 páginasLaboratorio#3Sebastian VargasAún no hay calificaciones
- ContentServer EsDocumento14 páginasContentServer EsSebastian VargasAún no hay calificaciones
- Histórico del FSLNDocumento11 páginasHistórico del FSLNRoney MarquesAún no hay calificaciones
- El Quijote Que No Luchò Contra Molinos Si No Contra Gigantes de VerdadDocumento2 páginasEl Quijote Que No Luchò Contra Molinos Si No Contra Gigantes de VerdadSebastian VargasAún no hay calificaciones
- Filtro Pasa Banda RLCDocumento2 páginasFiltro Pasa Banda RLCSebastian VargasAún no hay calificaciones
- El Campesinado y El Marxismo PDFDocumento24 páginasEl Campesinado y El Marxismo PDFCarlos RiVeraAún no hay calificaciones
- Taller LAB 3Documento2 páginasTaller LAB 3Sebastian VargasAún no hay calificaciones
- Snake Game STM32F103 LCD PulsadoresDocumento1 páginaSnake Game STM32F103 LCD PulsadoresSebastian VargasAún no hay calificaciones
- La Anuc y Los 50 Años de Su Lucha Por La TierraDocumento1 páginaLa Anuc y Los 50 Años de Su Lucha Por La TierraSebastian VargasAún no hay calificaciones
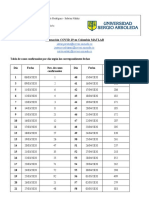
- Estimación COVID19-Peraza - Rodríguez - ValdezDocumento5 páginasEstimación COVID19-Peraza - Rodríguez - ValdezSebastian VargasAún no hay calificaciones
- Al Farc0007 PDFDocumento6 páginasAl Farc0007 PDFSebastian VargasAún no hay calificaciones
- TIJERASDocumento57 páginasTIJERASFarfalla FataleAún no hay calificaciones
- MR Santucho - Poder Burgués, Poder RevolucionarioDocumento25 páginasMR Santucho - Poder Burgués, Poder RevolucionarioFelisa CuraAún no hay calificaciones
- Aplicación de La Fisica Clasica en La IngeneriaDocumento7 páginasAplicación de La Fisica Clasica en La IngeneriaSebastian VargasAún no hay calificaciones
- DistanciamientoDocumento9 páginasDistanciamientoSebastian VargasAún no hay calificaciones
- Determinación Espectrofotométrica Hierro SuplementoDocumento4 páginasDeterminación Espectrofotométrica Hierro SuplementoSUSAN ASHLY MARQUEZ TRASLAVINAAún no hay calificaciones
- Anexo I - Ficha Médica para Ingreso Escolar Anual-1 - 230125 - 113222Documento5 páginasAnexo I - Ficha Médica para Ingreso Escolar Anual-1 - 230125 - 113222Yani CoronelAún no hay calificaciones
- Comercio Electrónico: Conceptos BásicosDocumento23 páginasComercio Electrónico: Conceptos BásicosCronwell MairenaAún no hay calificaciones
- Mate 03 Examen Final Tercero 2018 Nme PDFDocumento20 páginasMate 03 Examen Final Tercero 2018 Nme PDFDidaktica AmirAún no hay calificaciones
- LITIODocumento272 páginasLITIOMariajosé PuertaAún no hay calificaciones
- Región Andina de Colombia, geografía y economíaDocumento26 páginasRegión Andina de Colombia, geografía y economíaJesus Pardo YanezAún no hay calificaciones
- Comunicación Conjunta 1 Del 2023 Programa de FortalecimientoDocumento14 páginasComunicación Conjunta 1 Del 2023 Programa de Fortalecimientokkita xdAún no hay calificaciones
- Exposicion MOTOR ELECTRICODocumento3 páginasExposicion MOTOR ELECTRICOAngie EstepaAún no hay calificaciones
- Lab 1 Teoria ErroresDocumento36 páginasLab 1 Teoria ErroresFamilia Ríos PeredaAún no hay calificaciones
- Energia Eolica ExpDocumento13 páginasEnergia Eolica ExpPamela Ivette OlivaresAún no hay calificaciones
- Sesión Uno Presentación Servicios AmbientalesDocumento21 páginasSesión Uno Presentación Servicios Ambientalesgennie lopezAún no hay calificaciones
- 5 Presentación LEEN Inducción 2023Documento22 páginas5 Presentación LEEN Inducción 2023SOL GALLARDOAún no hay calificaciones
- Racionalismo y Empirismo. Descartes y Hume.Documento13 páginasRacionalismo y Empirismo. Descartes y Hume.blasko092100% (1)
- Habilidades Comunicativas IDocumento22 páginasHabilidades Comunicativas ITrabajo Social CoyhaiqueAún no hay calificaciones
- Lengua estándar y sus característicasDocumento6 páginasLengua estándar y sus característicasRocii HerreraAún no hay calificaciones
- Propuesta Servicios Proyecto Ejecutivo Cosmic WorldDocumento5 páginasPropuesta Servicios Proyecto Ejecutivo Cosmic WorldDiana DíazAún no hay calificaciones
- Propuesta Pip Señalizacion y Seguridad VialDocumento14 páginasPropuesta Pip Señalizacion y Seguridad VialRichard Valenzuela MenesesAún no hay calificaciones
- FRACKING-VentajasyDesventajasDocumento10 páginasFRACKING-VentajasyDesventajasJhon Alexander NumpaqueAún no hay calificaciones
- Mecánica para Ingenieros IDocumento13 páginasMecánica para Ingenieros INelson SalgadoAún no hay calificaciones
- ARTICULO UFPS. Extraccion de ADN para ConservarDocumento5 páginasARTICULO UFPS. Extraccion de ADN para ConservarmaferAún no hay calificaciones
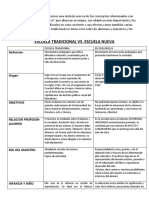
- TP Escuela NuevaDocumento7 páginasTP Escuela NuevaRooAún no hay calificaciones
- Entre: MujeresDocumento8 páginasEntre: MujeresCynthia Estefania Ortiz VieyraAún no hay calificaciones
- Plantillas Scrum ArregladoDocumento18 páginasPlantillas Scrum ArregladoDaniela PerezAún no hay calificaciones
- De La Cruz - TADocumento139 páginasDe La Cruz - TAJhon Alejandro GuillermoAún no hay calificaciones
- Normas Auditoría PúblicaDocumento7 páginasNormas Auditoría PúblicaMaría Maya100% (1)
- Evaluacion U 2Documento7 páginasEvaluacion U 2Jose Miguel CabreraAún no hay calificaciones
- Proyecto de Ciencia Jabon Casero Con Aceite UsadoDocumento17 páginasProyecto de Ciencia Jabon Casero Con Aceite UsadoGary W Aguilar100% (2)
- Maqueta de PlieguesDocumento1 páginaMaqueta de PlieguesMatias LizasoainAún no hay calificaciones
- Informe GranulometriaDocumento11 páginasInforme GranulometriaDomenica ParedesAún no hay calificaciones