También podría gustarte
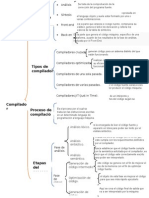
- Cuadro Sinoptico de CompiladorDocumento1 páginaCuadro Sinoptico de Compiladorpilpene100% (1)
- Manual Servicio Epk I5010 EspañolDocumento32 páginasManual Servicio Epk I5010 EspañolAlberto Bernardino Ybañez CastañedaAún no hay calificaciones
- MariaJesusGarciaSalazar SMR MME01 TareaDocumento7 páginasMariaJesusGarciaSalazar SMR MME01 TareaMarichuspi García SalazarAún no hay calificaciones
- Resumen Historia Procesadores y RamDocumento5 páginasResumen Historia Procesadores y RamTabitha CaseyAún no hay calificaciones
- FORMATO DE ENTREGA Y RESGUARDO DE EQUIPO DE CÓMPUTO v3Documento1 páginaFORMATO DE ENTREGA Y RESGUARDO DE EQUIPO DE CÓMPUTO v3Cristhian Missael Martiez RojasAún no hay calificaciones
- Cisco CyberOps - CyOps1.1 Chp13 Instructor Supplemental MaterialDocumento53 páginasCisco CyberOps - CyOps1.1 Chp13 Instructor Supplemental MaterialAcceso RemotoAún no hay calificaciones
- Fundamentos básicos de NVIDIA Jetso NanoDe EverandFundamentos básicos de NVIDIA Jetso NanoCalificación: 3 de 5 estrellas3/5 (1)
- Evolución de Los MicroprocesadoresDocumento32 páginasEvolución de Los Microprocesadorescristian100% (1)
- Estructuras - U5 - Lenguaje EnsambladorDocumento41 páginasEstructuras - U5 - Lenguaje EnsambladorCristianAún no hay calificaciones
- Acosta Pérez Álvaro MME01 TareaDocumento8 páginasAcosta Pérez Álvaro MME01 Tareaalvarodel89Aún no hay calificaciones
- 4 y 5 - Clase - HardwareDocumento42 páginas4 y 5 - Clase - HardwareDiegoAún no hay calificaciones
- IF02 Memorias Microprocesadores ArquiDocumento4 páginasIF02 Memorias Microprocesadores ArquiALBERTH IVAN ALEXIS RUIZ OLIVARESAún no hay calificaciones
- 06b y 04a Microprocesadores 20201Documento58 páginas06b y 04a Microprocesadores 20201EidenAún no hay calificaciones
- Taller MicroDocumento10 páginasTaller MicroDaniel Antonio Urdaneta NaimAún no hay calificaciones
- Taller #1 Javier Diaz, Juan Gutierrez y Jorge Romero C713-1Documento8 páginasTaller #1 Javier Diaz, Juan Gutierrez y Jorge Romero C713-1Ale AbAún no hay calificaciones
- Curso Arquitectura de Computadoras UTPDocumento224 páginasCurso Arquitectura de Computadoras UTPRaúlAún no hay calificaciones
- Presentacion 1Documento59 páginasPresentacion 1Paola DavilaAún no hay calificaciones
- Micro Big Version Jan 2010Documento198 páginasMicro Big Version Jan 2010TrelemadAún no hay calificaciones
- Principales Partes Del Computador y Sus FuncionesDocumento4 páginasPrincipales Partes Del Computador y Sus FuncionesNaty llorenteAún no hay calificaciones
- Arquitectura de OrdenadorDocumento39 páginasArquitectura de OrdenadorPunisherAún no hay calificaciones
- Definición de MicroprocesadorDocumento3 páginasDefinición de Microprocesadorricajav777Aún no hay calificaciones
- Actividad de Aprendizaje 3Documento13 páginasActividad de Aprendizaje 3BryanAún no hay calificaciones
- Evolucion MPDocumento32 páginasEvolucion MPJesus Calderon ValverdeAún no hay calificaciones
- Conceptos Basicos de UCDocumento53 páginasConceptos Basicos de UCJhon Jairo AnayaAún no hay calificaciones
- Taller I. Microprocesadores.Documento13 páginasTaller I. Microprocesadores.Daniel Antonio Urdaneta NaimAún no hay calificaciones
- Tema 3 MicroprocesadoresDocumento13 páginasTema 3 MicroprocesadoresHernan Ordoñez SanguezaAún no hay calificaciones
- Reparacion de PC PDFDocumento47 páginasReparacion de PC PDFMercodri100% (2)
- Cap 2 Segunda ParteDocumento9 páginasCap 2 Segunda ParteVALDEZ MOLLO MELANI JHOSELINAún no hay calificaciones
- El MicroprocesadorDocumento35 páginasEl MicroprocesadorramonloaizaAún no hay calificaciones
- Exposicion de ProcesadorDocumento29 páginasExposicion de ProcesadorAnlly Lorena Vargas CartagenaAún no hay calificaciones
- El MicroprocesadorDocumento9 páginasEl MicroprocesadorMarcela OrbesAún no hay calificaciones
- Especificaciones Técnicas de Los Microprocesadores IntelDocumento4 páginasEspecificaciones Técnicas de Los Microprocesadores IntelCarlos Alberto Ibarra Resendiz100% (1)
- El MicroprocesadorDocumento35 páginasEl MicroprocesadorLeonel LopezAún no hay calificaciones
- Lab 2 PCDocumento6 páginasLab 2 PCJesus HuamaniAún no hay calificaciones
- Mainboard y ProcesadoresDocumento8 páginasMainboard y ProcesadoresOscar Xavier Montero CampaverdeAún no hay calificaciones
- CgrwyDocumento17 páginasCgrwyKevin SosaAún no hay calificaciones
- 3 Unidad III - Apuntes PDFDocumento28 páginas3 Unidad III - Apuntes PDFRene Zahori Torres BecerraAún no hay calificaciones
- Clase 5Documento41 páginasClase 5Doraliz ParedesAún no hay calificaciones
- Clase 1Documento203 páginasClase 1Mecatronico HB Huaccaycachacc BaldarragoAún no hay calificaciones
- Tipos Genericos de MicroprocesadoresDocumento10 páginasTipos Genericos de MicroprocesadoresJORGE PISCOYAAún no hay calificaciones
- Actividad de Aprendizaje 1Documento13 páginasActividad de Aprendizaje 1BryanAún no hay calificaciones
- Evolución de Los Procesadores de Una LaptopDocumento20 páginasEvolución de Los Procesadores de Una LaptopVivar Rosio0% (1)
- Chipset PDFDocumento89 páginasChipset PDFAlfonso Miguel Velez V0% (1)
- LopezCastejon SMR MME01 TareaDocumento15 páginasLopezCastejon SMR MME01 Tareamarianator8837Aún no hay calificaciones
- Linea Tiempo IntelDocumento39 páginasLinea Tiempo Intelyeison arteagaAún no hay calificaciones
- Microprocesadores y Placas BaseDocumento14 páginasMicroprocesadores y Placas BaseMiguel PérezAún no hay calificaciones
- Microprocesador, Memoria RAM y Disco Duro, Requerimientos Básicos de Los Sistemas Operativos.Documento18 páginasMicroprocesador, Memoria RAM y Disco Duro, Requerimientos Básicos de Los Sistemas Operativos.Yajaira Soledad Chipantiza FreireAún no hay calificaciones
- La Historia Del MicroprocesadorDocumento58 páginasLa Historia Del MicroprocesadorChristian SalcedoAún no hay calificaciones
- Desarrollo Actividades Sistemas A Partir de La 4Documento11 páginasDesarrollo Actividades Sistemas A Partir de La 4luz mary pasuy enriquezAún no hay calificaciones
- Historia Del CPUDocumento25 páginasHistoria Del CPUJose BarahonaAún no hay calificaciones
- Segundo Parcial Arquitectura de La ComputadoraDocumento15 páginasSegundo Parcial Arquitectura de La ComputadoraBrisa AverzaAún no hay calificaciones
- Introducción A Los MicrocontroladoresDocumento179 páginasIntroducción A Los MicrocontroladoresGuerrero Barajas RicardoAún no hay calificaciones
- Unidad IIIDocumento84 páginasUnidad IIIJafeth BRAún no hay calificaciones
- Lenguaje EnsambladorDocumento18 páginasLenguaje EnsambladorIvan Flores PariAún no hay calificaciones
- Semana-5-Mantenimiento de PCDocumento13 páginasSemana-5-Mantenimiento de PCGamarra LeninAún no hay calificaciones
- Tarea 1 de MicrocontroladoresDocumento14 páginasTarea 1 de MicrocontroladoresJose Cruz Mandujano AlcalaAún no hay calificaciones
- Guia 1 Fund de MicroprocesadoresDocumento15 páginasGuia 1 Fund de MicroprocesadoresEmerson Jesus Del NogalAún no hay calificaciones
- Montaje Tema 3 Ejercicio 1 2 3 4 5 6Documento10 páginasMontaje Tema 3 Ejercicio 1 2 3 4 5 6HugoAún no hay calificaciones
- Guia TicsDocumento6 páginasGuia TicsGrailin Ventura GuerraAún no hay calificaciones
- Microprocesador de 32 BitsDocumento6 páginasMicroprocesador de 32 BitsJohn M. RomeroAún no hay calificaciones
- Arquitectura de ComputadorasDocumento53 páginasArquitectura de ComputadorasMayBlueAún no hay calificaciones
- Manual Mantenimiento PC SDocumento134 páginasManual Mantenimiento PC SLuis Antonio Morales PullasAún no hay calificaciones
- Exposición ChipsetDocumento20 páginasExposición ChipsetNadia Cruz SantiagoAún no hay calificaciones
- 4f04a47e-66fb-4a50-aeb8-002fef50e15aDocumento3 páginas4f04a47e-66fb-4a50-aeb8-002fef50e15aAnonymous cTqYw0Aún no hay calificaciones
- River Information System (Ris)Documento15 páginasRiver Information System (Ris)Yannick AlvaradoAún no hay calificaciones
- Luces Controladas Con MQTTDocumento4 páginasLuces Controladas Con MQTTGuillermo BravoAún no hay calificaciones
- H7Xin-diapositivas Inf 3Documento12 páginasH7Xin-diapositivas Inf 3samael28arielAún no hay calificaciones
- OracleDocumento17 páginasOracleloco abreu abreuAún no hay calificaciones
- Modelo RupDocumento2 páginasModelo RupBrandacaAún no hay calificaciones
- A3700V2 Manual Del Instalador V2-r2Documento6 páginasA3700V2 Manual Del Instalador V2-r2Carlos Simos100% (2)
- Evolución de Los Computadores Personales.Documento2 páginasEvolución de Los Computadores Personales.mateo carcamoAún no hay calificaciones
- Taller RepasoDocumento4 páginasTaller RepasoMinuAún no hay calificaciones
- ProgramacionDocumento47 páginasProgramacionjohnAún no hay calificaciones
- 1er Examen Parcial de Algoritmos ParalelosDocumento3 páginas1er Examen Parcial de Algoritmos ParalelosuniverAún no hay calificaciones
- Solucionario Montaje y Mantenimiento 2018 PDFDocumento118 páginasSolucionario Montaje y Mantenimiento 2018 PDFAnahí Mula de la BandaAún no hay calificaciones
- Taller 4 Telemática I - Configuring Named Standard ACLs InstructionsDocumento3 páginasTaller 4 Telemática I - Configuring Named Standard ACLs InstructionsDilan Esnehider Martinez SilvaAún no hay calificaciones
- Informe de Laboratorio TeleinformáticaDocumento19 páginasInforme de Laboratorio TeleinformáticaLena RodriguezAún no hay calificaciones
- Teo SistemasDocumento17 páginasTeo SistemasDaniel VarelaAún no hay calificaciones
- Segmento de PilaDocumento2 páginasSegmento de PilabymoaAún no hay calificaciones
- ZK Manual - Usuario - Enterprise 2018Documento57 páginasZK Manual - Usuario - Enterprise 2018docuAún no hay calificaciones
- Sistemas Operativos ExperimentosDocumento12 páginasSistemas Operativos ExperimentosalixAún no hay calificaciones
- Curso Domotica-PresencialDocumento6 páginasCurso Domotica-PresencialSantiago RemacheAún no hay calificaciones
- Línea de Tiempo, Avances Del CPUDocumento7 páginasLínea de Tiempo, Avances Del CPUcarmen solanoAún no hay calificaciones
- PROGRAMACION - Deber #1Documento14 páginasPROGRAMACION - Deber #1David LopAún no hay calificaciones
- LibroAutomatizacinIndustrialI Versin FinalDocumento109 páginasLibroAutomatizacinIndustrialI Versin Finalcesar.jimenez.conalep.057Aún no hay calificaciones
- TEMA 8 Internet - 1Documento18 páginasTEMA 8 Internet - 1marco_chin846871Aún no hay calificaciones
- Cuando Una Máquina No Computa - Javier BlancoDocumento10 páginasCuando Una Máquina No Computa - Javier BlancoAriel OlmedoAún no hay calificaciones
- Reporte de AplicacionDocumento21 páginasReporte de AplicacionEmiliano ArredondoAún no hay calificaciones
- Uni2 Act4 TAL APL PRA ALG BUSDocumento2 páginasUni2 Act4 TAL APL PRA ALG BUSRobertAún no hay calificaciones
- Metodos de Levantamiento Gps Grupo 3 2022Documento18 páginasMetodos de Levantamiento Gps Grupo 3 2022Mario Fernando Quintanilla ZuritaAún no hay calificaciones