También podría gustarte
- Arduino. Trucos y secretos.: 120 ideas para resolver cualquier problemaDe EverandArduino. Trucos y secretos.: 120 ideas para resolver cualquier problemaCalificación: 5 de 5 estrellas5/5 (5)
- Contrato de Recibo Por HonorarioDocumento31 páginasContrato de Recibo Por HonorarioKareling TerrerosAún no hay calificaciones
- Curso Arduino desde cero - 40cDocumento88 páginasCurso Arduino desde cero - 40cMariano Perea ManzanoAún no hay calificaciones
- Autómatas ProgramablesDocumento6 páginasAutómatas ProgramablesaquiumAún no hay calificaciones
- Alarma hogar ultrasonidoDocumento3 páginasAlarma hogar ultrasonidoReyli Joel Hernández LealAún no hay calificaciones
- LM 35 SensorDocumento7 páginasLM 35 SensorDavid AlorAún no hay calificaciones
- Practica BalancinDocumento5 páginasPractica BalancinCdcc90Aún no hay calificaciones
- Lección 5 - Entradas AnalógicasDocumento6 páginasLección 5 - Entradas AnalógicasAnty FanAún no hay calificaciones
- Video UltrasonicoDocumento17 páginasVideo UltrasonicoELIZABETH . HERRERA ORMENOAún no hay calificaciones
- Programación Visual M. en E. Juan Manuel Zaragoza AmbrizDocumento13 páginasProgramación Visual M. en E. Juan Manuel Zaragoza AmbrizemanuelAún no hay calificaciones
- Tutorial Sensor Ultrasónico HC-SR04Documento5 páginasTutorial Sensor Ultrasónico HC-SR04Cavallin CarlosAún no hay calificaciones
- Tutorial Arduino sensor HC-SR04Documento5 páginasTutorial Arduino sensor HC-SR04OSCAR ALBERTO MOLINA JUAREZAún no hay calificaciones
- Reporte Termometro Lm35-1Documento9 páginasReporte Termometro Lm35-1Gabino CaciaAún no hay calificaciones
- Lección 8Documento11 páginasLección 8JORGE ARROYOAún no hay calificaciones
- Práctica 5Documento54 páginasPráctica 5IGNACIO IVÁN OBREGON PEREZAún no hay calificaciones
- Frecuencimetro DigitalDocumento8 páginasFrecuencimetro DigitalAngel NietoAún no hay calificaciones
- Calibración sensor HC-SR04Documento13 páginasCalibración sensor HC-SR04RuedaMarinJorgeAndresAún no hay calificaciones
- 07 Cerradura Digital Con S4A y ArduinoDocumento2 páginas07 Cerradura Digital Con S4A y ArduinoJuan Pablo EspinalAún no hay calificaciones
- Practica 3 InterfacesDocumento13 páginasPractica 3 InterfacesZack D CarrilloAún no hay calificaciones
- gENERADOR ULTRASONIDOS PARA PERROSDocumento11 páginasgENERADOR ULTRASONIDOS PARA PERROStulayevaiAún no hay calificaciones
- Practica SensorDocumento7 páginasPractica SensorEmmaAún no hay calificaciones
- Tutorial de Arduino y Sensor Ultrasónico HCDocumento7 páginasTutorial de Arduino y Sensor Ultrasónico HCMarco ColomaAún no hay calificaciones
- Tarea UpeaDocumento13 páginasTarea UpeaMaykol ChipanaAún no hay calificaciones
- Apertura de Cerradura Mediante BluetoothDocumento3 páginasApertura de Cerradura Mediante BluetoothIvan ChipanaAún no hay calificaciones
- Proyecto ArduinoDocumento18 páginasProyecto ArduinoalexanderAún no hay calificaciones
- Entradas y Salidas Analógicas y DigitalesDocumento16 páginasEntradas y Salidas Analógicas y DigitalesCristianAún no hay calificaciones
- Sensor de GasDocumento10 páginasSensor de Gas15 Haros Gutierrez Jessica MayteAún no hay calificaciones
- Proyecto Final Sensor de DintanciaDocumento7 páginasProyecto Final Sensor de Dintanciamore cars , more passionAún no hay calificaciones
- Frecuencimetro Digital 'Lw3dyl'Documento1 páginaFrecuencimetro Digital 'Lw3dyl'pepe sanchezAún no hay calificaciones
- 01.taller 3 - Marcador PingpongDocumento6 páginas01.taller 3 - Marcador Pingpongivonne sAún no hay calificaciones
- Laboratorio #12 - MEDIDOR DE TEMPERATURA y SENSOR DE ULTRASONIDODocumento13 páginasLaboratorio #12 - MEDIDOR DE TEMPERATURA y SENSOR DE ULTRASONIDOjorgeAún no hay calificaciones
- Entradas Digitales en ARDUINODocumento10 páginasEntradas Digitales en ARDUINOCristian Ronaldo SaraviaAún no hay calificaciones
- Contador de 0-99Documento6 páginasContador de 0-99Javer Bernardo Martinez0% (1)
- Arquitectura de ComputadorasDocumento20 páginasArquitectura de ComputadorasLeonel Francisco Orellana OrellanaAún no hay calificaciones
- Manual Arduino: guía completa sobre el sistema Arduino UNODocumento6 páginasManual Arduino: guía completa sobre el sistema Arduino UNOArmas San Juan Christopher EduardoAún no hay calificaciones
- Arduino Mega 2560 - EntregarDocumento14 páginasArduino Mega 2560 - EntregarJohn Edgard Canahua UchasaraAún no hay calificaciones
- PequeñaDocumento2 páginasPequeñaAnderson HuillcaAún no hay calificaciones
- Clase 6 - Librerías y Resolución de Problemas HONDURASDocumento11 páginasClase 6 - Librerías y Resolución de Problemas HONDURAScrisAún no hay calificaciones
- Guía para ExamenDocumento9 páginasGuía para ExamenJazael ÁlvarezAún no hay calificaciones
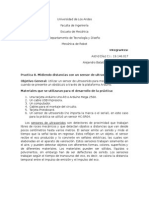
- Practica 8. Midiendo Distancias Con Un UltrasonidosDocumento6 páginasPractica 8. Midiendo Distancias Con Un UltrasonidosAstrid Carolina Díaz GonzálezAún no hay calificaciones
- Sensor UltrasónicoDocumento18 páginasSensor Ultrasónicouri100% (1)
- Proyecto Arduino casa inteligenteDocumento7 páginasProyecto Arduino casa inteligenteTatiana PerezAún no hay calificaciones
- Prácticas de Sensores Con Arduino H.MDocumento36 páginasPrácticas de Sensores Con Arduino H.MHectorJoseMojicaOrtizAún no hay calificaciones
- Lectura y Escritura de Valores en La Tarjeta Arduino en Relación A LabiewDocumento10 páginasLectura y Escritura de Valores en La Tarjeta Arduino en Relación A LabiewLuis Ayasta Portocarrero100% (1)
- Informe 6Documento3 páginasInforme 6Duo Doble AAún no hay calificaciones
- Proyecto Final Circuitos Digitales - Reloj DigitalDocumento21 páginasProyecto Final Circuitos Digitales - Reloj DigitalWilver Albornoz EspinozaAún no hay calificaciones
- Cerradura ElectricaDocumento8 páginasCerradura ElectricaFrancisco ZuñigaAún no hay calificaciones
- Sensores en Entradas Analógicas de Arduino - DiymakersDocumento9 páginasSensores en Entradas Analógicas de Arduino - DiymakersHilmer Irving Marcha HuancaAún no hay calificaciones
- Practica BalancinDocumento4 páginasPractica BalancinF Javier GarcíaAún no hay calificaciones
- Sensor de Agua Con ArduinoDocumento13 páginasSensor de Agua Con ArduinoWalter Córdova MacedoAún no hay calificaciones
- Secuencia de Leds ConDocumento9 páginasSecuencia de Leds CongilbertocrAún no hay calificaciones
- UltrasonicoDocumento5 páginasUltrasonicoBeiker DiazAún no hay calificaciones
- Control SerialDocumento57 páginasControl SerialOrlando GuarachiAún no hay calificaciones
- Ventilasdor ArduinoDocumento10 páginasVentilasdor ArduinoOrianaGaydouAún no hay calificaciones
- Sensor de Temperatura Atmel Studio - Atmega2560Documento5 páginasSensor de Temperatura Atmel Studio - Atmega2560andreAún no hay calificaciones
- Proyecto de SensoresDocumento7 páginasProyecto de SensoresDANIEL EDUARDO BAEZAún no hay calificaciones
- Potencio MetroDocumento12 páginasPotencio MetroMicaela MartinezAún no hay calificaciones
- Reporte Lab Electrometria ProyectoDocumento10 páginasReporte Lab Electrometria ProyectoBernardo Rangel RamirezAún no hay calificaciones
- Arduino 2 Ultrasonido ProgramacionDocumento18 páginasArduino 2 Ultrasonido ProgramacionEMMANUEL OBANDOAún no hay calificaciones
- Informe Del Ejercicio 2 Hecho en ClaseDocumento12 páginasInforme Del Ejercicio 2 Hecho en ClaseInversiones HernándezAún no hay calificaciones
- 01.taller 3 - Marcador PingpongDocumento6 páginas01.taller 3 - Marcador Pingpongivonne sAún no hay calificaciones
- Liberal Ismo: Liberali SMODocumento4 páginasLiberal Ismo: Liberali SMOivonne sAún no hay calificaciones
- Marco Teorico y ConceptualDocumento10 páginasMarco Teorico y Conceptualivonne sAún no hay calificaciones
- Animales endémicos de ColombiaDocumento8 páginasAnimales endémicos de Colombiaivonne sAún no hay calificaciones
- Pelicula Cadena de FavoresDocumento3 páginasPelicula Cadena de Favoresivonne sAún no hay calificaciones
- Cuadernillo de Preguntas Saber 11 - MatemáticasDocumento28 páginasCuadernillo de Preguntas Saber 11 - MatemáticasFabián Andrés Perilla Manjarrés0% (5)
- Religion 11ºDocumento15 páginasReligion 11ºivonne sAún no hay calificaciones
- Cuadernillo de Preguntas Saber 11 - MatemáticasDocumento28 páginasCuadernillo de Preguntas Saber 11 - MatemáticasFabián Andrés Perilla Manjarrés0% (5)
- 4730-Texto Del Artículo-19552-2-10-20191122 PDFDocumento9 páginas4730-Texto Del Artículo-19552-2-10-20191122 PDFivonne sAún no hay calificaciones
- Estudio de tráfico EMP.114-EMP.600Documento13 páginasEstudio de tráfico EMP.114-EMP.600Libertad FinancieraAún no hay calificaciones
- Sesion 5Documento22 páginasSesion 5Deysi Atequipa CordovaAún no hay calificaciones
- Estructura Programa de Seguridad Del PacienteDocumento5 páginasEstructura Programa de Seguridad Del PacienteJackeline SuarezAún no hay calificaciones
- Formatos Selfmailer O AutoenviableDocumento1 páginaFormatos Selfmailer O AutoenviableVera Arauza AdrianaAún no hay calificaciones
- Ensayo Del Balance de Situacion (Balance General)Documento4 páginasEnsayo Del Balance de Situacion (Balance General)LUIS ALBERTO APARICIO SALCEDOAún no hay calificaciones
- PlanillaDocumento2 páginasPlanillaMiguel Ángel Hernández PérezAún no hay calificaciones
- Hoja de vida ingeniero químicoDocumento2 páginasHoja de vida ingeniero químicoYomar GuillenAún no hay calificaciones
- P&idDocumento19 páginasP&idIsamar Salas MirandaAún no hay calificaciones
- Sílabo Epu-NivelaciónDocumento11 páginasSílabo Epu-NivelaciónAlexander PozoAún no hay calificaciones
- Manejo de Residuos Sólidos en Establecimientos de SaludDocumento2 páginasManejo de Residuos Sólidos en Establecimientos de SaludYHOSSIMAR IVAN CCORAHUA MEZAAún no hay calificaciones
- Instructivo Homologacion Digital PDFDocumento14 páginasInstructivo Homologacion Digital PDFD Alejandro C UrregoAún no hay calificaciones
- Contrato Prosalud 2023Documento25 páginasContrato Prosalud 2023elianalandeogomezAún no hay calificaciones
- Celdas SM6 ScheneiderDocumento26 páginasCeldas SM6 ScheneiderChristianEnrique17Aún no hay calificaciones
- FormatFactoryPart9 mp3Documento3 páginasFormatFactoryPart9 mp3Vanessa MartinesAún no hay calificaciones
- LosasDocumento26 páginasLosasGinoGarciaArmasAún no hay calificaciones
- Informe FrecuenciaDocumento3 páginasInforme FrecuenciaJose Jadir Layton CorzoAún no hay calificaciones
- 100 MontaditosDocumento3 páginas100 MontaditosjosemanuelAún no hay calificaciones
- ExponencialDocumento7 páginasExponencialjesus herazoAún no hay calificaciones
- Diseñar Un Plan de Mantenimiento Preventivo A Una Máquina Compactadora de Bloques para Optimizar El Proceso Productivo (Página 2) - MonografiasDocumento9 páginasDiseñar Un Plan de Mantenimiento Preventivo A Una Máquina Compactadora de Bloques para Optimizar El Proceso Productivo (Página 2) - MonografiasMateo AndresAún no hay calificaciones
- Instrucciones Nivel Optico Leica Serie Na700Documento36 páginasInstrucciones Nivel Optico Leica Serie Na700Jose Rodriguez RosalesAún no hay calificaciones
- Sistema Nacional PlanificacionDocumento234 páginasSistema Nacional PlanificacionCristian Mendez AguilarAún no hay calificaciones
- Preguntas Del Caso NetlfixDocumento7 páginasPreguntas Del Caso NetlfixErickson Eduardo Landaverde MuñozAún no hay calificaciones
- Obligaciones formales para llevar libros y registros contablesDocumento109 páginasObligaciones formales para llevar libros y registros contablesJorge Aguilar AlcaldeAún no hay calificaciones
- Fallas y Soluciones Micronautra M3Documento4 páginasFallas y Soluciones Micronautra M3Mariano CastilloAún no hay calificaciones
- Ficha de Datos de Seguridad Cyclo® Maxpro™ Grey Ox™ Silicone Gasket MakerDocumento23 páginasFicha de Datos de Seguridad Cyclo® Maxpro™ Grey Ox™ Silicone Gasket Makerskate dancerAún no hay calificaciones
- Análisis de Trabajo Seguro (ATSDocumento2 páginasAnálisis de Trabajo Seguro (ATSMiguel GonzalesAún no hay calificaciones
- Taller Administración DeportivaDocumento1 páginaTaller Administración Deportivajavier javier100% (2)
- Tampico 1Documento6 páginasTampico 12-A Omar Santiago Moreno TorresAún no hay calificaciones
- Gasto AutomóvilDocumento6 páginasGasto AutomóvilAlberto Rodriguez GalindoAún no hay calificaciones