También podría gustarte
- William F. Smith and Javad Hashemi - Fundamentos de La Ciencia e Ingenieria de Materiales-McGraw-Hill (2006) - 384-392Documento9 páginasWilliam F. Smith and Javad Hashemi - Fundamentos de La Ciencia e Ingenieria de Materiales-McGraw-Hill (2006) - 384-392Carlos ClementeAún no hay calificaciones
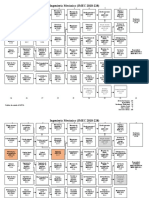
- Reticulas Mecanica ITTGDocumento2 páginasReticulas Mecanica ITTGCarlos ClementeAún no hay calificaciones
- Reticula S Mecanic A 2016Documento2 páginasReticula S Mecanic A 2016Carlos ClementeAún no hay calificaciones
- Nissan (Datsun) Violet WIKIDocumento13 páginasNissan (Datsun) Violet WIKICarlos ClementeAún no hay calificaciones
- Boletín Pistones FP DIESEL para Detroit S60 Mejorados PDFDocumento1 páginaBoletín Pistones FP DIESEL para Detroit S60 Mejorados PDFCahuapaza GilmerAún no hay calificaciones
- Ejercicios Sesion 12 - SeminarioDocumento1 páginaEjercicios Sesion 12 - SeminarioMAYCOL EDUARD GUILLEN HENOSTROZAAún no hay calificaciones
- 19 Eisn 1 114Documento43 páginas19 Eisn 1 114Randy SueroAún no hay calificaciones
- 6.1.4. - Fundaciones Superficiales-Zapata CombinadaDocumento21 páginas6.1.4. - Fundaciones Superficiales-Zapata CombinadaAlexander Muriel HilariAún no hay calificaciones
- EVALUACION SUSTITUTORIO CALCULO III - 2020 20-Propuesto PDFDocumento2 páginasEVALUACION SUSTITUTORIO CALCULO III - 2020 20-Propuesto PDFPohita AnaferAún no hay calificaciones
- Tarea 3 Vespertina Estadistica 1 - 2 219Documento3 páginasTarea 3 Vespertina Estadistica 1 - 2 219Hector Fernando Carrera0% (1)
- González Ortega José Manuel Act. 4Documento3 páginasGonzález Ortega José Manuel Act. 4Manuel GonzalezAún no hay calificaciones
- TesisDocumento167 páginasTesissib3liusAún no hay calificaciones
- Taller Unidad IIDocumento8 páginasTaller Unidad IIpatriciaAún no hay calificaciones
- Estadistica II ContabilidadDocumento68 páginasEstadistica II ContabilidadFranklin BricAún no hay calificaciones
- Predimencionamiento de PresasDocumento18 páginasPredimencionamiento de PresasJaime Auqui ArecheAún no hay calificaciones
- Amef TranslateDocumento16 páginasAmef TranslateEduardo Felix Ramirez Palacios100% (1)
- Primer Informe Hidrologia - RIO LLANTENDocumento17 páginasPrimer Informe Hidrologia - RIO LLANTENErling Paolo Miranda SanchezAún no hay calificaciones
- Transformada de FourierDocumento4 páginasTransformada de FourierDavid OlayaAún no hay calificaciones
- PC2 Ee532 - Fiee UniDocumento3 páginasPC2 Ee532 - Fiee UniDavidAún no hay calificaciones
- Guía de Trabajo 7° Año. Cs. Naturales. Unidad 1Documento8 páginasGuía de Trabajo 7° Año. Cs. Naturales. Unidad 1cesarinvidalinAún no hay calificaciones
- HernandezArias Candelaria M19S1AI2Documento4 páginasHernandezArias Candelaria M19S1AI2Candelaria Hernandez Arias100% (1)
- Resumen Sobre El Pensamiento Filosófico ModernoDocumento5 páginasResumen Sobre El Pensamiento Filosófico ModernoINVERSIONES MANAAún no hay calificaciones
- Características de RTMPDocumento3 páginasCaracterísticas de RTMPcontareaAún no hay calificaciones
- Tipos de Variable JavaDocumento7 páginasTipos de Variable JavaRafael HernandezAún no hay calificaciones
- Cuadro SinopticoDocumento2 páginasCuadro SinopticoJavier SierraAún no hay calificaciones
- Cuestionario OPE Parte 3Documento6 páginasCuestionario OPE Parte 3dianaitahAún no hay calificaciones
- Normativa Colocación Suelos UNE 56-810Documento23 páginasNormativa Colocación Suelos UNE 56-810api-119251807Aún no hay calificaciones
- 2da Practica 2021-ProcesosDocumento4 páginas2da Practica 2021-ProcesosGustavo AndreéAún no hay calificaciones
- Expo HuamanDocumento7 páginasExpo HuamankevinestAún no hay calificaciones
- La Paradoja Del ConoDocumento4 páginasLa Paradoja Del ConoMissael CampecheAún no hay calificaciones
- Taller Monogastricos 2Documento43 páginasTaller Monogastricos 2Valentina Molina ﺕﺕAún no hay calificaciones
- SOPORTE DE TOLVA DESING SEPTIEMBRE-Análisis Estático 1-1Documento12 páginasSOPORTE DE TOLVA DESING SEPTIEMBRE-Análisis Estático 1-1Rony Castañeda BenitesAún no hay calificaciones
- Trabajo Practico Adicional Funcion ExponencialDocumento3 páginasTrabajo Practico Adicional Funcion ExponencialTobias Abraham UreñaAún no hay calificaciones