También podría gustarte
- Rendimiento de Computadoras - EjerciciosDocumento20 páginasRendimiento de Computadoras - EjerciciosLuis Castillo100% (4)
- Plan de Estudios Informatica 2019Documento55 páginasPlan de Estudios Informatica 2019Andres Camilo Herrera100% (1)
- M.U T C.orion+v02.es en FR PDFDocumento507 páginasM.U T C.orion+v02.es en FR PDFHakim Rahmani100% (1)
- La Niña Mas Bonita Del Mundo TABDocumento3 páginasLa Niña Mas Bonita Del Mundo TABPAUL ESAU NARVAEZ GILER100% (1)
- La Niña Mas Bonita Del Mundo TABDocumento3 páginasLa Niña Mas Bonita Del Mundo TABPAUL ESAU NARVAEZ GILER100% (1)
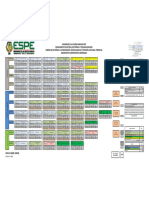
- MALLA Electrónica y Automatización 1Documento1 páginaMALLA Electrónica y Automatización 1PAUL ESAU NARVAEZ GILERAún no hay calificaciones
- Ejercicios y Problemas Con PicDocumento17 páginasEjercicios y Problemas Con Picalperda50% (2)
- La Mujer PerfectaDocumento3 páginasLa Mujer PerfectaPAUL ESAU NARVAEZ GILERAún no hay calificaciones
- Informe 9 Grupo 6 PDFDocumento17 páginasInforme 9 Grupo 6 PDFPAUL ESAU NARVAEZ GILERAún no hay calificaciones
- Malla IEAJDocumento1 páginaMalla IEAJPAUL ESAU NARVAEZ GILERAún no hay calificaciones
- Silabo InstDocumento4 páginasSilabo InstPAUL ESAU NARVAEZ GILERAún no hay calificaciones
- Genius Por Albert EinsteineDocumento1 páginaGenius Por Albert EinsteinePAUL ESAU NARVAEZ GILERAún no hay calificaciones
- Silabo LiderazgoDocumento6 páginasSilabo LiderazgoPAUL ESAU NARVAEZ GILERAún no hay calificaciones
- Microcurricular - Básica Superior Semana 4 P6Documento10 páginasMicrocurricular - Básica Superior Semana 4 P6PAUL ESAU NARVAEZ GILERAún no hay calificaciones
- Porfa No Te Vayas Beret Morat Letra y Acordes by MUSICTUTORIALSDocumento5 páginasPorfa No Te Vayas Beret Morat Letra y Acordes by MUSICTUTORIALSPAUL ESAU NARVAEZ GILER100% (1)
- GUIA1Documento3 páginasGUIA1PAUL ESAU NARVAEZ GILERAún no hay calificaciones
- 1.1. Fuentes Reguladas (AC/DC) Ventajas DesventajasDocumento4 páginas1.1. Fuentes Reguladas (AC/DC) Ventajas DesventajasPAUL ESAU NARVAEZ GILERAún no hay calificaciones
- Cronograma Interno Distribucion de Fichas PedagogicasDocumento1 páginaCronograma Interno Distribucion de Fichas PedagogicasPAUL ESAU NARVAEZ GILERAún no hay calificaciones
- MICROCURRICULAR LL, CN, ECA, MAT. e ING. BÁSICA SUPERIOR SEMANA 1 P6Documento6 páginasMICROCURRICULAR LL, CN, ECA, MAT. e ING. BÁSICA SUPERIOR SEMANA 1 P6PAUL ESAU NARVAEZ GILERAún no hay calificaciones
- EJERCICIOSDocumento5 páginasEJERCICIOSPAUL ESAU NARVAEZ GILERAún no hay calificaciones
- Informatica Preparacion PR EvaluacionDocumento5 páginasInformatica Preparacion PR Evaluacionjuan diego benito mesaAún no hay calificaciones
- Capitulo 7Documento3 páginasCapitulo 7kanonasoAún no hay calificaciones
- Características de Un ServidorDocumento3 páginasCaracterísticas de Un ServidorRicardo LopezAún no hay calificaciones
- SWISSLOG Versión para DOS 3.D8Documento110 páginasSWISSLOG Versión para DOS 3.D8David Fernández Jiménez100% (1)
- M-Circuitos de Disparo Con MicrocontroladoresDocumento2 páginasM-Circuitos de Disparo Con MicrocontroladoresIsidro HernandezAún no hay calificaciones
- Informe Planeacion Del Soporte TécnicoDocumento3 páginasInforme Planeacion Del Soporte TécnicoRolando PosadaAún no hay calificaciones
- Manual Del Micro Control Ad or 8051Documento67 páginasManual Del Micro Control Ad or 8051Gumaro VasquezAún no hay calificaciones
- 01 - Componentes Del ComputadorDocumento16 páginas01 - Componentes Del Computadorsandra milena bejarano herreraAún no hay calificaciones
- Teoría Del PipelineDocumento9 páginasTeoría Del PipelineMichel ChocceAún no hay calificaciones
- Tauret Computadores - .Documento7 páginasTauret Computadores - .Jonathan MelgarejoAún no hay calificaciones
- Examen Sobre El ComputadorDocumento5 páginasExamen Sobre El ComputadorRonald Hoyos GutierrezAún no hay calificaciones
- Tipos de Tornillos para Mon PDFDocumento3 páginasTipos de Tornillos para Mon PDFGrabando con Javii el CRACKAún no hay calificaciones
- Mantenimiento Preventivo en HardwareDocumento6 páginasMantenimiento Preventivo en HardwareCarlos Eleodoro Romero CruzAún no hay calificaciones
- Compuamigos 2Documento30 páginasCompuamigos 2Melina GalánAún no hay calificaciones
- Repaso de ExamenDocumento7 páginasRepaso de ExamenVirginia PerezAún no hay calificaciones
- CUESTIONARIO 1 DispositivosDocumento2 páginasCUESTIONARIO 1 DispositivosRamon GonzalezAún no hay calificaciones
- Manual Básico Windows PDFDocumento10 páginasManual Básico Windows PDFAl PabloAún no hay calificaciones
- Control 8 Vanessa GomezDocumento9 páginasControl 8 Vanessa GomezBeba Gomez MoralesAún no hay calificaciones
- Alta Definición Sin Tiempos de Espera.: Copiadora Multifuncional de Gran Formato de 4.8 Metros / MinutoDocumento2 páginasAlta Definición Sin Tiempos de Espera.: Copiadora Multifuncional de Gran Formato de 4.8 Metros / MinutoPedro Guerrero PérezAún no hay calificaciones
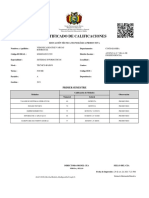
- Certificado de CalificacionesDocumento1 páginaCertificado de CalificacionesCamacho Bylaw JohnAún no hay calificaciones
- Partes Del CelularDocumento4 páginasPartes Del CelularMiguel CoitaAún no hay calificaciones
- Informe de Práctica 1 PDFDocumento13 páginasInforme de Práctica 1 PDFAlvaro LCAún no hay calificaciones
- Cuadro StockDocumento5 páginasCuadro StockEduardoUretaAún no hay calificaciones
- Computadoras Automotrices OkDocumento3 páginasComputadoras Automotrices OksantjaramilloAún no hay calificaciones
- Sistem As Opera Tivo ST IposDocumento7 páginasSistem As Opera Tivo ST IposCarlos CisnerosAún no hay calificaciones
- Cuestionario Del Capítulo 2 - Attempt ReviewDocumento7 páginasCuestionario Del Capítulo 2 - Attempt ReviewCarolinaAún no hay calificaciones
- Procesador de TextosDocumento3 páginasProcesador de TextosArlette SamAún no hay calificaciones