También podría gustarte
- Calculo Factor PotenciaDocumento4 páginasCalculo Factor PotenciaLeonardo GarciaAún no hay calificaciones
- Siemens SQNXDocumento17 páginasSiemens SQNXjose arangoitia100% (1)
- Redes 2 PuertosDocumento2 páginasRedes 2 PuertosLeonardo GarciaAún no hay calificaciones
- Hoja de Vida Jesus L Garcia SDocumento2 páginasHoja de Vida Jesus L Garcia SLeonardo GarciaAún no hay calificaciones
- Caldera 2Documento1 páginaCaldera 2Leonardo GarciaAún no hay calificaciones
- Condensadores Motor TrifasicoDocumento7 páginasCondensadores Motor TrifasicoLeonardo GarciaAún no hay calificaciones
- Electromecanica Calculo Kva Cos PhiDocumento7 páginasElectromecanica Calculo Kva Cos PhiLeonardo GarciaAún no hay calificaciones
- 11 864sesDocumento8 páginas11 864sesLeonardo GarciaAún no hay calificaciones
- Aprendiendo A Programar Con Diagramas de FlujoDocumento38 páginasAprendiendo A Programar Con Diagramas de FlujoAdri SiguenzaAún no hay calificaciones
- 1 SMDocumento13 páginas1 SMLeonardo GarciaAún no hay calificaciones
- Acciones Basicas de ControlDocumento26 páginasAcciones Basicas de ControlLeonardo GarciaAún no hay calificaciones
- Trasformadores TrifásicosDocumento12 páginasTrasformadores TrifásicosLeonardo GarciaAún no hay calificaciones
- Propiedades de Los SistemasDocumento12 páginasPropiedades de Los SistemasLeonardo GarciaAún no hay calificaciones
- Automatizacion Con s7-200Documento64 páginasAutomatizacion Con s7-200Leonardo GarciaAún no hay calificaciones
- Controlador de Temperatura Danfoss EKC 201Documento8 páginasControlador de Temperatura Danfoss EKC 201christian96Aún no hay calificaciones
- Club Se 80 SimulacionDocumento84 páginasClub Se 80 SimulacionMarcelo Bernardez100% (6)
- Mantenimiento General de de Obras CivilesDocumento4 páginasMantenimiento General de de Obras CivilesAgri Albertini60% (5)
- Guias Laboratorio Electrónica Analógica I 2013Documento26 páginasGuias Laboratorio Electrónica Analógica I 2013Leonardo GarciaAún no hay calificaciones
- Automatizacion IndustriualDocumento8 páginasAutomatizacion IndustriualLeonardo GarciaAún no hay calificaciones
- El Propósito de OPCDocumento2 páginasEl Propósito de OPCLeonardo GarciaAún no hay calificaciones
- Liderazgo ComunitarioDocumento2 páginasLiderazgo ComunitarioLeonardo GarciaAún no hay calificaciones
- Fuentes ConmutadasDocumento46 páginasFuentes Conmutadasbob75Aún no hay calificaciones
- Mantenimiento General de de Obras CivilesDocumento4 páginasMantenimiento General de de Obras CivilesAgri Albertini60% (5)
- Integrales DoblesDocumento8 páginasIntegrales Doblesluispdzp78% (9)
- Punt ErosDocumento49 páginasPunt ErosLeonardo GarciaAún no hay calificaciones
- Marco Teorico Medidor de RadarDocumento4 páginasMarco Teorico Medidor de RadarLeonardo GarciaAún no hay calificaciones
- Manual Del Sistema PendubotDocumento50 páginasManual Del Sistema PendubotcayetanojcmAún no hay calificaciones
- Encoders LinealesDocumento3 páginasEncoders LinealesMaxito Ccama FigueroaAún no hay calificaciones
- Fundamentos Básicos de ServomotoresDocumento26 páginasFundamentos Básicos de ServomotoresHernan Mayna100% (6)
- Encoders ÓpticosDocumento13 páginasEncoders ÓpticosAlex Toapanta SotoAún no hay calificaciones
- EncodersDocumento19 páginasEncodersEnrique RoseroAún no hay calificaciones
- Cursillo VVVF4Documento18 páginasCursillo VVVF4AnkAún no hay calificaciones
- Conveyour TrakingDocumento148 páginasConveyour Trakingfenix5114Aún no hay calificaciones
- Montaje ServoDocumento52 páginasMontaje Servosalojavi100% (1)
- 20213042Documento176 páginas20213042Rogelio ValdezAún no hay calificaciones
- Lexium 05Documento12 páginasLexium 05Luis Francisco Becerril JuradoAún no hay calificaciones
- Estudio Motor de HidrógenoDocumento8 páginasEstudio Motor de HidrógenoAnonymous bc4L2s2UVF100% (1)
- Funcionamiento EncoderDocumento4 páginasFuncionamiento EncoderPavel Angulo100% (2)
- 100 Diapositivas 2 SensoresDocumento100 páginas100 Diapositivas 2 Sensoresfelipe choqueAún no hay calificaciones
- TP6 2022Documento6 páginasTP6 2022Carolina Ruiz CamposAún no hay calificaciones
- Manual FX900 500Documento181 páginasManual FX900 500LuisTolosa100% (4)
- RelayDocumento172 páginasRelayAlfredo JiménezAún no hay calificaciones
- Cuestionario de Robótica PDFDocumento17 páginasCuestionario de Robótica PDFIsrael Bonilla50% (4)
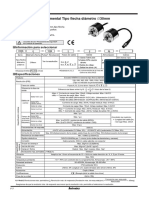
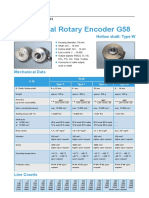
- Incremental Rotary Encoder G58: Shaft: Type S / L / H Hollow Shaft: Type WDocumento6 páginasIncremental Rotary Encoder G58: Shaft: Type S / L / H Hollow Shaft: Type Wjroyal692974Aún no hay calificaciones
- Errores AntiguosDocumento39 páginasErrores AntiguosVictor Pescador AmorAún no hay calificaciones
- Un Sensor de RotacionDocumento28 páginasUn Sensor de RotacionRené Flores ApazaAún no hay calificaciones
- I1 Electiva CaracterizacionDocumento3 páginasI1 Electiva CaracterizacionLug LeoAún no hay calificaciones
- Manual InstruccionesDocumento106 páginasManual InstruccionesJharby Leonardo RiverosAún no hay calificaciones
- Fundamentos de Teoría de Control Automático y AplicacionesDocumento2 páginasFundamentos de Teoría de Control Automático y AplicacionesRaziel MedinaAún no hay calificaciones
- Rekoba - Manual Ekm66 v01-2012Documento76 páginasRekoba - Manual Ekm66 v01-2012Alex Under100% (2)
- Sensor EsDocumento93 páginasSensor EsalexalanveraAún no hay calificaciones
- Servos de PosiciónDocumento57 páginasServos de PosiciónDiego CamachoAún no hay calificaciones
- Scorbot-ER VDocumento6 páginasScorbot-ER VDanilo Alfonso Rojas MendezAún no hay calificaciones
- VF 230 TrifaseDocumento12 páginasVF 230 TrifaseHicham EddaferiAún no hay calificaciones
- Tesis Villareal Producc PDFDocumento76 páginasTesis Villareal Producc PDFVioleta Amalia Gutierrez PagánAún no hay calificaciones
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- Excel 2021 y 365 Paso a Paso: Paso a PasoDe EverandExcel 2021 y 365 Paso a Paso: Paso a PasoCalificación: 5 de 5 estrellas5/5 (12)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteCalificación: 1 de 5 estrellas1/5 (1)
- LAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.De EverandLAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.Calificación: 4.5 de 5 estrellas4.5/5 (54)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónDe EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- ¿Cómo piensan las máquinas?: Inteligencia artificial para humanosDe Everand¿Cómo piensan las máquinas?: Inteligencia artificial para humanosCalificación: 5 de 5 estrellas5/5 (1)
- Lógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosDe EverandLógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosCalificación: 3.5 de 5 estrellas3.5/5 (7)
- Machine Learning y Deep Learning: Usando Python, Scikit y KerasDe EverandMachine Learning y Deep Learning: Usando Python, Scikit y KerasAún no hay calificaciones
- Inteligencia artificial: Análisis de datos e innovación para principiantesDe EverandInteligencia artificial: Análisis de datos e innovación para principiantesCalificación: 4 de 5 estrellas4/5 (3)
- Design Thinking para principiantes: La innovación como factor para el éxito empresarialDe EverandDesign Thinking para principiantes: La innovación como factor para el éxito empresarialCalificación: 4.5 de 5 estrellas4.5/5 (10)
- El mito de la inteligencia artificial: Por qué las máquinas no pueden pensar como nosotros lo hacemosDe EverandEl mito de la inteligencia artificial: Por qué las máquinas no pueden pensar como nosotros lo hacemosCalificación: 5 de 5 estrellas5/5 (2)
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasDe EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Todo Sobre Tecnología Blockchain: La Guía Definitiva Para Principiantes Sobre Monederos BlockchainDe EverandTodo Sobre Tecnología Blockchain: La Guía Definitiva Para Principiantes Sobre Monederos BlockchainAún no hay calificaciones
- EL PLAN DE NEGOCIOS DE UNA FORMA SENCILLA. La guía práctica que ayuda a poner en marcha nuevos proyectos e ideas empresariales.De EverandEL PLAN DE NEGOCIOS DE UNA FORMA SENCILLA. La guía práctica que ayuda a poner en marcha nuevos proyectos e ideas empresariales.Calificación: 4 de 5 estrellas4/5 (20)
- Curso básico de Python: La guía para principiantes para una introducción en la programación con PythonDe EverandCurso básico de Python: La guía para principiantes para una introducción en la programación con PythonAún no hay calificaciones
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosDe EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosCalificación: 5 de 5 estrellas5/5 (5)
- Minería de Datos: Guía de Minería de Datos para Principiantes, que Incluye Aplicaciones para Negocios, Técnicas de Minería de Datos, Conceptos y MásDe EverandMinería de Datos: Guía de Minería de Datos para Principiantes, que Incluye Aplicaciones para Negocios, Técnicas de Minería de Datos, Conceptos y MásCalificación: 4.5 de 5 estrellas4.5/5 (4)
- Ciberseguridad industrial e infraestructuras críticasDe EverandCiberseguridad industrial e infraestructuras críticasAún no hay calificaciones