También podría gustarte
- Ejercicios Libro.Documento17 páginasEjercicios Libro.Manuel Mauricio Mora CorralesAún no hay calificaciones
- Ejercicios de MarkovDocumento7 páginasEjercicios de MarkovFermincabo75% (4)
- C++ (Diapositivas)Documento12 páginasC++ (Diapositivas)WilsonMuñozLeon100% (2)
- F7 MANUAL YASKAWA - EspañolDocumento243 páginasF7 MANUAL YASKAWA - Españolalperda73% (11)
- Metodos de Busqueda en El PacmanDocumento9 páginasMetodos de Busqueda en El PacmanJerson AleksanderAún no hay calificaciones
- Evaluacion Final - Escenario 8 - PRIMER BLOQUE-CIENCIAS BASICAS - METODOS NUMERICOS - (GRUPO1) PDFDocumento9 páginasEvaluacion Final - Escenario 8 - PRIMER BLOQUE-CIENCIAS BASICAS - METODOS NUMERICOS - (GRUPO1) PDFhugo berdugoAún no hay calificaciones
- Sedimentacion EjerciciosDocumento4 páginasSedimentacion EjerciciosPaucar Coyla JonathanAún no hay calificaciones
- Arquitectura CompletoDocumento13 páginasArquitectura CompletoGustavo Chinchilla RinconAún no hay calificaciones
- TemporizacionDocumento10 páginasTemporizacionArmecks MoralesAún no hay calificaciones
- OsciloscopioDocumento35 páginasOsciloscopioWalther CJAún no hay calificaciones
- Optimización Global y Mirilla EjerciciosDocumento3 páginasOptimización Global y Mirilla EjerciciosJorge Alberto Guzman Gutierrez100% (1)
- 02FP-Variables y Tipos de Datos Sesion 1 PDFDocumento24 páginas02FP-Variables y Tipos de Datos Sesion 1 PDFMarcos MoralesAún no hay calificaciones
- Guia 2Documento15 páginasGuia 2Milagros VegaAún no hay calificaciones
- Búsqueda SecuencialDocumento16 páginasBúsqueda SecuencialEdgarCahuichBerzunzaAún no hay calificaciones
- Fisica 23 WeDocumento6 páginasFisica 23 WeSalvador AcostaAún no hay calificaciones
- Errores y Taylor Udh 2018Documento1 páginaErrores y Taylor Udh 2018ms1821Aún no hay calificaciones
- Tema 2 y 3. Resumen de ArquitecturaDocumento19 páginasTema 2 y 3. Resumen de Arquitecturaroko112Aún no hay calificaciones
- T3 Juego Del GatoDocumento10 páginasT3 Juego Del GatoAndres GutierrezAún no hay calificaciones
- Ordenamiento BurbujaDocumento3 páginasOrdenamiento BurbujaPao Romero100% (1)
- Unidad 4 Control de TransaccionesDocumento3 páginasUnidad 4 Control de TransaccionesAlejandro Sánchez0% (1)
- Apuntes EnsambladorDocumento60 páginasApuntes EnsambladorgatmaedAún no hay calificaciones
- 1 Fundamentos Del Lenguaje EnsambladorDocumento16 páginas1 Fundamentos Del Lenguaje EnsambladorArthur LopezAún no hay calificaciones
- Practico Base de DatosDocumento9 páginasPractico Base de DatosINFORMATIC GUYSAún no hay calificaciones
- Conceptos Basicos de E-S ProgramadaDocumento7 páginasConceptos Basicos de E-S ProgramadaRaul BaidalAún no hay calificaciones
- T Are A 4 Intel I Gencia ArtificialDocumento5 páginasT Are A 4 Intel I Gencia ArtificialGustavo López FigueroaAún no hay calificaciones
- 1443957Documento16 páginas1443957Samael MartinezAún no hay calificaciones
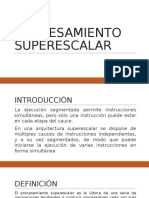
- Procesamiento SuperescalarDocumento20 páginasProcesamiento SuperescalarAlicia Rodriguez100% (1)
- Memoria ParticionadaDocumento6 páginasMemoria Particionadajuan perezAún no hay calificaciones
- Arquitecturas de Computo - MultiprocesamientoDocumento9 páginasArquitecturas de Computo - MultiprocesamientoMirzha RojasAún no hay calificaciones
- Listas Enlazadas Estructura Datos C#Documento11 páginasListas Enlazadas Estructura Datos C#Omar MuñizAún no hay calificaciones
- Bloque de Control de Proceso Sistemas Operativos....Documento10 páginasBloque de Control de Proceso Sistemas Operativos....CarmeloWuandisAún no hay calificaciones
- Técnicas de Recuperación Utilizando BitácoraDocumento23 páginasTécnicas de Recuperación Utilizando BitácoraninoxAún no hay calificaciones
- Laboratorio 2Documento11 páginasLaboratorio 2Ana Luz CotradoAún no hay calificaciones
- EJERCICIO 4 Traductor SimpleDocumento3 páginasEJERCICIO 4 Traductor SimpledianeAún no hay calificaciones
- Actividad 6 ACDocumento4 páginasActividad 6 ACAlejo NscAún no hay calificaciones
- Packet Tracer - Configuración de Rutas Estáticas y Predeterminadas IPv4 6.2.2.4Documento3 páginasPacket Tracer - Configuración de Rutas Estáticas y Predeterminadas IPv4 6.2.2.4Giovanni Aranda Rodriguez100% (1)
- Busqueda No Informada - IADocumento8 páginasBusqueda No Informada - IAFran PulidoAún no hay calificaciones
- 6.2.2.5 Lab - Configuring VLANs and Trunking - ILMDocumento26 páginas6.2.2.5 Lab - Configuring VLANs and Trunking - ILMdavid baron garcesAún no hay calificaciones
- Interpretes y CompiladoresDocumento6 páginasInterpretes y CompiladoresCristian Fuentes SalgadoAún no hay calificaciones
- Práctica - 04 - Nociones - Proba - SimulacionDocumento1 páginaPráctica - 04 - Nociones - Proba - SimulacionfranklinAún no hay calificaciones
- Concurrencia. Exclusión Mutua y SincronizaciónDocumento24 páginasConcurrencia. Exclusión Mutua y SincronizaciónMax Alvarado SánchezAún no hay calificaciones
- Metodos de OrdenamientoDocumento12 páginasMetodos de OrdenamientoBryan Jeanpierre Horna VásquezAún no hay calificaciones
- Gestion de Procesos en LinuxDocumento14 páginasGestion de Procesos en LinuxCastro CRAún no hay calificaciones
- Mapeo de MemoriasDocumento12 páginasMapeo de MemoriasKarlita M.Aún no hay calificaciones
- Soluciones Libro Compiladores Principios Tecnicas y Erramientas PDFDocumento7 páginasSoluciones Libro Compiladores Principios Tecnicas y Erramientas PDFChan SeleneAún no hay calificaciones
- Precedencia de OperadoresDocumento6 páginasPrecedencia de OperadoresYessica RosasAún no hay calificaciones
- Análisis Sintáctico y Matriz PredictivaDocumento10 páginasAnálisis Sintáctico y Matriz PredictivaIrvin G. Contreras García0% (1)
- Tarea 1Documento21 páginasTarea 1Leonardo LemusAún no hay calificaciones
- Electrotecnia Silabo Del CursoDocumento4 páginasElectrotecnia Silabo Del CursoAlejandroCalleRuizAún no hay calificaciones
- CCNA 2 Cisco v5.0 Practica Final - Packet TracerDocumento19 páginasCCNA 2 Cisco v5.0 Practica Final - Packet TracerLuis ArguetaAún no hay calificaciones
- Plantilla InformePractica#2Documento6 páginasPlantilla InformePractica#2Jessica HinojosaAún no hay calificaciones
- Unidad de Control - Sistemas OperativosDocumento8 páginasUnidad de Control - Sistemas OperativosPaula StalAún no hay calificaciones
- Definición de Ordenamiento Por Método QuicksortDocumento2 páginasDefinición de Ordenamiento Por Método QuicksortNovedades MLAún no hay calificaciones
- Lab 4 (Utilizacion de La Bocina) PDFDocumento7 páginasLab 4 (Utilizacion de La Bocina) PDFYenisley Padrón GonzálezAún no hay calificaciones
- Quiz 1 PDFDocumento3 páginasQuiz 1 PDFCarlitos PilonietaAún no hay calificaciones
- Planificación FCFSDocumento40 páginasPlanificación FCFSBoni LinuxerAún no hay calificaciones
- Diseño de Sistemas Digitales: "Máquina Algorítmica de Estados (Carta ASM) "Documento21 páginasDiseño de Sistemas Digitales: "Máquina Algorítmica de Estados (Carta ASM) "Emmanuel DíazAún no hay calificaciones
- Procedimientos Almacenados ExtendidosDocumento12 páginasProcedimientos Almacenados ExtendidosCamilo Alberto Prieto RodrigezAún no hay calificaciones
- Procesador de LenguajeDocumento4 páginasProcesador de Lenguajelucita287Aún no hay calificaciones
- Registros de SegmentosDocumento4 páginasRegistros de SegmentosJ84C0% (1)
- Las Instrucciones Del Ensamblador Salto Comparacíón LoopDocumento8 páginasLas Instrucciones Del Ensamblador Salto Comparacíón LoopAnna ReznorAún no hay calificaciones
- Las Instrucciones Del EnsambladorDocumento19 páginasLas Instrucciones Del EnsambladorMiguel Angel MartinezAún no hay calificaciones
- Tema2 Saltos Ciclos Incrementos y DecrementosDocumento18 páginasTema2 Saltos Ciclos Incrementos y DecrementosAnonymous Sn2Vm4NVoAún no hay calificaciones
- Unidad 2. Tema 2.2 y 2.3Documento6 páginasUnidad 2. Tema 2.2 y 2.3Victor Alfonso MontalvoAún no hay calificaciones
- Las Instrucciones Del EnsambladorDocumento7 páginasLas Instrucciones Del EnsambladorAlejandro Leota100% (1)
- Cap 09Documento26 páginasCap 09Emzero TrewqAún no hay calificaciones
- Os2 U2Documento106 páginasOs2 U2Eduardo CornelioAún no hay calificaciones
- Crear Bases de Datos en SQL ServerDocumento13 páginasCrear Bases de Datos en SQL ServerEduardo CornelioAún no hay calificaciones
- TareaDocumento1 páginaTareaEduardo CornelioAún no hay calificaciones
- Nuestra Esperanza No Termina Ni Se CentraDocumento1 páginaNuestra Esperanza No Termina Ni Se CentraEduardo CornelioAún no hay calificaciones
- Sidor 1Documento2 páginasSidor 1Eduardo CornelioAún no hay calificaciones
- Las Fases de Un or SonDocumento2 páginasLas Fases de Un or SonEduardo CornelioAún no hay calificaciones
- Perfil de La Carrera de LicDocumento1 páginaPerfil de La Carrera de LicEduardo CornelioAún no hay calificaciones
- Ejercicios Complementarios Fisica I Impulso y RotaciónDocumento3 páginasEjercicios Complementarios Fisica I Impulso y RotaciónChristian TPAún no hay calificaciones
- Propiedades Atómicas QuimicaDocumento6 páginasPropiedades Atómicas QuimicaDani SangarAún no hay calificaciones
- Aq 12 2019-Ii UnmsmDocumento22 páginasAq 12 2019-Ii UnmsmmeryAún no hay calificaciones
- Ilovepdf Merged PDFDocumento35 páginasIlovepdf Merged PDFHenry Carrillo BeunzaAún no hay calificaciones
- Hoja 3 2020-21Documento4 páginasHoja 3 2020-21Jc LlamasAún no hay calificaciones
- Clase 6 El Problema Del ÁreaDocumento23 páginasClase 6 El Problema Del Áreacarlos rojasAún no hay calificaciones
- Practica Opencv 04Documento6 páginasPractica Opencv 04Edwing Maquera FloresAún no hay calificaciones
- Tipos de TransmisiónDocumento1 páginaTipos de TransmisiónJosé Rincón100% (1)
- RM - 1º, EdsonDocumento21 páginasRM - 1º, EdsonHector AdcoAún no hay calificaciones
- Grupo Numero 3 Propiedades y EstiloDocumento12 páginasGrupo Numero 3 Propiedades y EstiloStephany Nicolle Ordoñez vasquezAún no hay calificaciones
- Práctica Calificada N°2 - 2023-02 - 295716 - ESTADÍSTICA GENERAL - 2023-02 - FC-VIRCOM02D01MDocumento11 páginasPráctica Calificada N°2 - 2023-02 - 295716 - ESTADÍSTICA GENERAL - 2023-02 - FC-VIRCOM02D01MNicollth CTAún no hay calificaciones
- CircuitosDocumento8 páginasCircuitosAnthony LLayqui LazoAún no hay calificaciones
- Ensayo PDT 1 MatematicaDocumento15 páginasEnsayo PDT 1 MatematicaFrancisco Pérez ValenciaAún no hay calificaciones
- Ppto Extras Banquetas y RellenosDocumento12 páginasPpto Extras Banquetas y RellenosArmando Martínez HernandezAún no hay calificaciones
- 059 - GMB Hidraulicos 15 - 30 CVDocumento1 página059 - GMB Hidraulicos 15 - 30 CVTecnico2 HPVAún no hay calificaciones
- Pca AnalisisDocumento13 páginasPca AnalisisCarlos Edison SerranoAún no hay calificaciones
- Bustamante Ramirez Claudia Alejandra 16360389Documento23 páginasBustamante Ramirez Claudia Alejandra 16360389Cid Gines AngelAún no hay calificaciones
- Manual Averias Junkers Salida de Gases TermostatosDocumento58 páginasManual Averias Junkers Salida de Gases TermostatosPepe Papo100% (1)
- Practica 6 Laboratorio de Resistencia de Materiales 1Documento6 páginasPractica 6 Laboratorio de Resistencia de Materiales 1Esteban Flores VegaAún no hay calificaciones
- Tarea 1 de MetodologiaDocumento5 páginasTarea 1 de MetodologiaManuelqAún no hay calificaciones
- Estadística Ii: Lic. Jessica Elizabeth Chalco Suárez Lic. Wilbert Colque CandiaDocumento28 páginasEstadística Ii: Lic. Jessica Elizabeth Chalco Suárez Lic. Wilbert Colque CandiaDanitza D. OmarAún no hay calificaciones
- 8ANALISIS COMBINATORIOsolDocumento7 páginas8ANALISIS COMBINATORIOsolCarlos Alberto Lozano Escobedo100% (1)
- Modelación Estructural II - Clase 04 - ARMADURASDocumento31 páginasModelación Estructural II - Clase 04 - ARMADURASMikal Canturín RíosAún no hay calificaciones
- Control Semana 6 Nivelacion Matematicas Vanessa FloresDocumento5 páginasControl Semana 6 Nivelacion Matematicas Vanessa FloresVanessa Flores94% (16)
- Ficha 5 Potencia 3°.Documento2 páginasFicha 5 Potencia 3°.Matias༒Johao Santi༒ Mendrano ArbietoAún no hay calificaciones