También podría gustarte
- Cómo aprender sobre Blockchain y criptomonedas en 48 horas o menosDe EverandCómo aprender sobre Blockchain y criptomonedas en 48 horas o menosAún no hay calificaciones
- Sistemas seguros de acceso y transmisión de datos. IFCT0109De EverandSistemas seguros de acceso y transmisión de datos. IFCT0109Aún no hay calificaciones
- Biometrico OdtDocumento14 páginasBiometrico OdtomarAún no hay calificaciones
- Proyecto BiometriaDocumento135 páginasProyecto Biometriaapi-369955389% (9)
- Reloj BiometricoDocumento7 páginasReloj BiometricoJhair Suarez HuamanAún no hay calificaciones
- Proyecto Sistema de Identificación Mediante Huella Digital para El Acceso A Un Area SeguraDocumento6 páginasProyecto Sistema de Identificación Mediante Huella Digital para El Acceso A Un Area SeguraTecnico Soporte2Aún no hay calificaciones
- 23 - Bidart Datos BiometricoDocumento24 páginas23 - Bidart Datos Biometricoantonela.sammartinAún no hay calificaciones
- Sistemas de Identificación BiométricosDocumento15 páginasSistemas de Identificación BiométricosMagda Elena SantosAún no hay calificaciones
- Identidad Digital (Modulo 1)Documento52 páginasIdentidad Digital (Modulo 1)Cristiam Javier Osorio VanegasAún no hay calificaciones
- Seguridad Biometria y CriptografiaDocumento4 páginasSeguridad Biometria y Criptografia1r1s210430Aún no hay calificaciones
- Soluciones de BiometriaDocumento4 páginasSoluciones de BiometriaCelia PérezAún no hay calificaciones
- 2 Articulo2Documento12 páginas2 Articulo2elrangelm5Aún no hay calificaciones
- Desarrollo de Una Aplicación de Trazabilidad de Transacciones y Bloques en La Blockchain Con Soporte de Componentes de Inteligencia ArtificialDocumento5 páginasDesarrollo de Una Aplicación de Trazabilidad de Transacciones y Bloques en La Blockchain Con Soporte de Componentes de Inteligencia ArtificialManuel RiveroAún no hay calificaciones
- Capitulo 9 CriptografiaDocumento11 páginasCapitulo 9 CriptografiaPablo BerroaAún no hay calificaciones
- ProyectoDocumento10 páginasProyectoJose Armando Perez JimenezAún no hay calificaciones
- Trabajo BiometriaDocumento39 páginasTrabajo BiometriaGuillermo Hernandez Alcazar100% (1)
- E36 Sistema de Control de Acceso Mediante Código QRDocumento11 páginasE36 Sistema de Control de Acceso Mediante Código QRSam J ContrerasAún no hay calificaciones
- Aplicacion Sensor Kinect MedicinaDocumento6 páginasAplicacion Sensor Kinect MedicinaLuisAún no hay calificaciones
- Memoria NFCDocumento56 páginasMemoria NFCelecmaticAún no hay calificaciones
- Reconocimiento de Huellas Dactilare Aplicando FourierDocumento7 páginasReconocimiento de Huellas Dactilare Aplicando FourierBartolome SimpsonAún no hay calificaciones
- Biometria SenaDocumento16 páginasBiometria SenaAnGelik SmiThAún no hay calificaciones
- Sistemas Biométricos 2023Documento20 páginasSistemas Biométricos 2023santosacevedo0618Aún no hay calificaciones
- 11 01 016 Probador Ropa Virtual Medida Innovadora HigieneDocumento8 páginas11 01 016 Probador Ropa Virtual Medida Innovadora HigieneCarlos CaicedoAún no hay calificaciones
- TEMASDocumento3 páginasTEMASjuan carlos apaza gutierrezAún no hay calificaciones
- Implementación de Un Control No Lineal para El Seguimiento Robot-Humano Con Un Sensor 3DDocumento10 páginasImplementación de Un Control No Lineal para El Seguimiento Robot-Humano Con Un Sensor 3DAndres VillaAún no hay calificaciones
- RECOMENDACIONESDocumento2 páginasRECOMENDACIONESBuenos NetAún no hay calificaciones
- Tecnologia Biometrica-Práctica Semana 8Documento8 páginasTecnologia Biometrica-Práctica Semana 8P Enrique Trigoso EchaizAún no hay calificaciones
- Perfil de Tesis (Corregido)Documento16 páginasPerfil de Tesis (Corregido)ridofoxAún no hay calificaciones
- Arqu - Articulo 1.0Documento11 páginasArqu - Articulo 1.0kevin GarciaAún no hay calificaciones
- 1105 1088 1 PB PDFDocumento6 páginas1105 1088 1 PB PDFprieres811Aún no hay calificaciones
- Onboarding Digital Modificado y ActualizadoDocumento13 páginasOnboarding Digital Modificado y ActualizadoSergio GarciaAún no hay calificaciones
- Identificacion BiometricaDocumento4 páginasIdentificacion BiometricaAndres GuerreroAún no hay calificaciones
- Informe Autentificaciones BiometricasDocumento14 páginasInforme Autentificaciones BiometricasAndres Maria ParedesAún no hay calificaciones
- Marco TeoricoDocumento6 páginasMarco TeoricoJosé BatistaAún no hay calificaciones
- Unidad 4 Administracion de Sistemas OperativosDocumento89 páginasUnidad 4 Administracion de Sistemas OperativosByron CeliAún no hay calificaciones
- Ciberseguridad para UsuariosDocumento30 páginasCiberseguridad para UsuariosDani GJAún no hay calificaciones
- Aporte Individual Fase 2 Christian Pinilla RamosDocumento14 páginasAporte Individual Fase 2 Christian Pinilla RamosChristian Pinilla RamosAún no hay calificaciones
- Articulo CientificoDocumento7 páginasArticulo Cientificoelian vega sanchezAún no hay calificaciones
- Aceptación e Identificación de Clientes No Presenciales y Las Técnicas Biométricas - AizcorbeDocumento21 páginasAceptación e Identificación de Clientes No Presenciales y Las Técnicas Biométricas - AizcorbeDaniel Raúl FernándezAún no hay calificaciones
- Tecnologías de La CiberseguridadDocumento26 páginasTecnologías de La CiberseguridadAbigail MartínezAún no hay calificaciones
- Seguridad de Red PDFDocumento9 páginasSeguridad de Red PDFJose Antonio Lopez RodriguezAún no hay calificaciones
- Biometrica ComputacionDocumento10 páginasBiometrica ComputacionVictor Daniel Guevara DiazAún no hay calificaciones
- Guia de Trabajo Practico Criptografia PDFDocumento5 páginasGuia de Trabajo Practico Criptografia PDFWil FranAún no hay calificaciones
- Uso de Los IVDocumento11 páginasUso de Los IVAracely SegoviaAún no hay calificaciones
- U2 TecnologíasEmergentesDocumento7 páginasU2 TecnologíasEmergenteserjohernanAún no hay calificaciones
- Origen de La BiometriaDocumento5 páginasOrigen de La Biometriamarshella herreraAún no hay calificaciones
- Acta de Constitución Del Proyecto - Grupo 5Documento4 páginasActa de Constitución Del Proyecto - Grupo 5Jose Carlos Huamani QuicañoAún no hay calificaciones
- Aplicaciones de La CriptografiaDocumento24 páginasAplicaciones de La CriptografiaMary Sorales25% (4)
- Practica 08 FigueroaBecerraKatterinConsuelo.Documento8 páginasPractica 08 FigueroaBecerraKatterinConsuelo.fbecerraketteriAún no hay calificaciones
- Jorge Luis Yrivarren - Tecnología Del RENIEC para El Desarrollo Del PaísDocumento34 páginasJorge Luis Yrivarren - Tecnología Del RENIEC para El Desarrollo Del PaísMGerson OsccoAún no hay calificaciones
- Dsei U2 Ea BedaDocumento5 páginasDsei U2 Ea BedaBernardo Dzul0% (1)
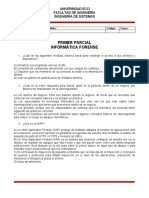
- Primer Parcial Infor ForenseDocumento3 páginasPrimer Parcial Infor ForenseRicardo RodríguezAún no hay calificaciones
- PAE 3 2P Reinoso KarenDocumento14 páginasPAE 3 2P Reinoso KarenJennifer MoralesAún no hay calificaciones
- Resumen de Tesis KFigueroa y AVillacreses, Director de Tesis Mag. Gustavo Galio M. 09 Dic 2013Documento6 páginasResumen de Tesis KFigueroa y AVillacreses, Director de Tesis Mag. Gustavo Galio M. 09 Dic 2013WYlemVelasquezzAún no hay calificaciones
- Blockchain Blockchain Y El Internet Y El Internet de Las Cosas de Las CosasDocumento22 páginasBlockchain Blockchain Y El Internet Y El Internet de Las Cosas de Las CosasDiana BatallaAún no hay calificaciones
- Proyecto Detección y Reconocimiento Facial V.1.2Documento8 páginasProyecto Detección y Reconocimiento Facial V.1.2Cristina BenitesAún no hay calificaciones
- Certificados Digitales - Esquema de Seguridad Integral PDFDocumento5 páginasCertificados Digitales - Esquema de Seguridad Integral PDFyesidt1113684Aún no hay calificaciones
- Operaciones auxiliares con Tecnologías de la Información y la Comunicación. IFCT0108De EverandOperaciones auxiliares con Tecnologías de la Información y la Comunicación. IFCT0108Aún no hay calificaciones
- Visión por computador: Explorando las profundidades de la visión por computadoraDe EverandVisión por computador: Explorando las profundidades de la visión por computadoraAún no hay calificaciones
- Recibos 9303Documento8 páginasRecibos 9303deprisatrans0610Aún no hay calificaciones
- Pagos Por Referencia - Corporación Universitaria AmericanaDocumento1 páginaPagos Por Referencia - Corporación Universitaria AmericanaRicardo AragonAún no hay calificaciones
- Recibos 9303Documento8 páginasRecibos 9303deprisatrans0610Aún no hay calificaciones
- Introduccion PDFDocumento19 páginasIntroduccion PDFLorena LozanoAún no hay calificaciones
- Fundamentos Sistemas Operativos (Linux, Windows, BSD)Documento155 páginasFundamentos Sistemas Operativos (Linux, Windows, BSD)Alejandro Rodolfo MendezAún no hay calificaciones
- Ataques Informáticos, Ethical Hacking Y Conciencia Seguridad Informática en NiñosDocumento7 páginasAtaques Informáticos, Ethical Hacking Y Conciencia Seguridad Informática en NiñosRicardo AragonAún no hay calificaciones
- NSR10Documento1 páginaNSR10Ricardo AragonAún no hay calificaciones
- Informe Sobre Central ElectricaDocumento17 páginasInforme Sobre Central ElectricaRicher Cadillo0% (1)
- Cartilla Semilleros Investigacion 2017Documento25 páginasCartilla Semilleros Investigacion 2017Daniela BohorquezAún no hay calificaciones
- Infografia Teoria General de SistemasDocumento1 páginaInfografia Teoria General de Sistemasvalentina menesesAún no hay calificaciones
- Protocolo en ATC en Call Center PDFDocumento2 páginasProtocolo en ATC en Call Center PDFMary GPAún no hay calificaciones
- Escuela TécnicaDocumento40 páginasEscuela TécnicaProf. yonny Garcia100% (1)
- P. (Resistencia) V1.0Documento12 páginasP. (Resistencia) V1.0Ramon Iman MartinezAún no hay calificaciones
- Como Funciona El Sensor Tema para El ParcialDocumento27 páginasComo Funciona El Sensor Tema para El ParcialDiego BuzziAún no hay calificaciones
- Q. El SustantivoDocumento22 páginasQ. El Sustantivoantoniolopez_32Aún no hay calificaciones
- 3.1 Estado y DerechoDocumento3 páginas3.1 Estado y DerechoAxel MirandaAún no hay calificaciones
- Felipe Santibàñez - Entrega 1 - AnodinoDocumento7 páginasFelipe Santibàñez - Entrega 1 - AnodinoFelixe SantibáñezAún no hay calificaciones
- Gestion de La Calidad 3Documento66 páginasGestion de La Calidad 3RolingAún no hay calificaciones
- Pre Entrega Ensayo Historia de La Vivienda SocialDocumento4 páginasPre Entrega Ensayo Historia de La Vivienda Socialcristian tamayAún no hay calificaciones
- EGOIN-MaderaLaminada CastellanoDocumento34 páginasEGOIN-MaderaLaminada CastellanoAdri GarciaAún no hay calificaciones
- Auto EvaluacionDocumento2 páginasAuto EvaluacionJulia Clarisa Colodro BarrientosAún no hay calificaciones
- Ensayo ConsumismoDocumento6 páginasEnsayo ConsumismoKenny AlarconAún no hay calificaciones
- Oxidacion de Metales A Alta Temperatura Aluminio, Cobre y LatonDocumento28 páginasOxidacion de Metales A Alta Temperatura Aluminio, Cobre y LatonSandro Fabrizzio Sanchez Sanchez100% (1)
- Harold KoontzDocumento18 páginasHarold KoontzMaleficus ObscurusAún no hay calificaciones
- Guía de Movimiento y Equilibrio RotacionalDocumento3 páginasGuía de Movimiento y Equilibrio RotacionalPamela RamírezAún no hay calificaciones
- Ahorro de EnergiaDocumento33 páginasAhorro de EnergiaChristian Daniel ViveroAún no hay calificaciones
- Contexto Social - Actividad 1 - FormatoDocumento9 páginasContexto Social - Actividad 1 - FormatoSantos EduardoAún no hay calificaciones
- Concepto Ministerio - Pautas Reubicacion LaboralDocumento4 páginasConcepto Ministerio - Pautas Reubicacion LaboralAlfonso BarrantesAún no hay calificaciones
- Instrumentos de Conocimiento para La Gestión Del Patrimonio CulturalDocumento30 páginasInstrumentos de Conocimiento para La Gestión Del Patrimonio CulturalPatricia LeónAún no hay calificaciones
- Síntesis de Pruebas de La Existencia de Dios.Documento26 páginasSíntesis de Pruebas de La Existencia de Dios.Julian TorresAún no hay calificaciones
- Explicamos Por Que El Estado Ha Delimitado Territorios de Areas Naturales ProtegidasDocumento3 páginasExplicamos Por Que El Estado Ha Delimitado Territorios de Areas Naturales ProtegidasJuan Antón Martínez100% (1)
- Reporte de LecturaDocumento6 páginasReporte de LecturaBrenda Paola Aguilar PeñaAún no hay calificaciones
- GUIA DE APRENDIZAJE No 01.doc FUNDAMENTOS CONTABLESDocumento11 páginasGUIA DE APRENDIZAJE No 01.doc FUNDAMENTOS CONTABLESOny CassianiAún no hay calificaciones
- DIA 2 Explicamos Los Beneficios de Los Aparatos Tecnológicos en La ComunicaciónDocumento3 páginasDIA 2 Explicamos Los Beneficios de Los Aparatos Tecnológicos en La ComunicaciónZami LuceroAún no hay calificaciones
- Representa UstedDocumento4 páginasRepresenta UstednfdbfdwAún no hay calificaciones
- Valorización de Residuos Inorgánicos para Su Comercialización - FIA - UNIDocumento34 páginasValorización de Residuos Inorgánicos para Su Comercialización - FIA - UNIOlivaresAlbertoAún no hay calificaciones
- Aspectos Positivos de La MarihuanaDocumento9 páginasAspectos Positivos de La MarihuanaAlberto CoitiñoAún no hay calificaciones