También podría gustarte
- Control digital de orientación, posición y velocidad basado en movimientos de la cabeza para un prototipo de simulación de silla de ruedasDe EverandControl digital de orientación, posición y velocidad basado en movimientos de la cabeza para un prototipo de simulación de silla de ruedasAún no hay calificaciones
- Manual PIC 18F4550-1Documento244 páginasManual PIC 18F4550-1Sandro Julián Panana EspinoAún no hay calificaciones
- Catálogo EPY Febrero 2021Documento83 páginasCatálogo EPY Febrero 2021jeshuann100% (1)
- Atmega164p EspañolDocumento378 páginasAtmega164p EspañolMarco SolísAún no hay calificaciones
- Rectona Óptica: Generación de energía a partir del calorDe EverandRectona Óptica: Generación de energía a partir del calorAún no hay calificaciones
- ESP32Documento7 páginasESP32strummaticjonazAún no hay calificaciones
- Monitoreo, control y adquisición de datos con arduino y visual basic .netDe EverandMonitoreo, control y adquisición de datos con arduino y visual basic .netAún no hay calificaciones
- S03.s01-Guia de Laboratorio 01 PDFDocumento3 páginasS03.s01-Guia de Laboratorio 01 PDFGiancarloFabianAún no hay calificaciones
- Manual Del Home Boe-Bot en CastellanoDocumento259 páginasManual Del Home Boe-Bot en Castellanonaun_rincon100% (1)
- Codey-B y El Código Python: El Niño Que Codificó El MundoDe EverandCodey-B y El Código Python: El Niño Que Codificó El MundoAún no hay calificaciones
- Proyecto Final Semaforos Inteligentes Con El Microcontrolador PIC 16F877ADocumento5 páginasProyecto Final Semaforos Inteligentes Con El Microcontrolador PIC 16F877AJohnAndersonEspaña0% (1)
- IV congreso internacional de ingenierías: La ingeniería como base del desarrolloDe EverandIV congreso internacional de ingenierías: La ingeniería como base del desarrolloAún no hay calificaciones
- Sensor 1aDocumento11 páginasSensor 1aYeral Belfort VilcaAún no hay calificaciones
- Catálogo de productos electrónicos MC.ElectronicsDocumento10 páginasCatálogo de productos electrónicos MC.ElectronicsMarcos CnAún no hay calificaciones
- Guia Pics CompletaDocumento142 páginasGuia Pics Completaapi-27535945100% (4)
- Practica 9 ESP32 Con Conectividad Con THINGSPEAKDocumento10 páginasPractica 9 ESP32 Con Conectividad Con THINGSPEAKBRIANT VALLES VADILLOAún no hay calificaciones
- Introducción Al PIC SIMULATOR IDEDocumento40 páginasIntroducción Al PIC SIMULATOR IDEOmar Muñoz100% (1)
- ConfigurarFUSESDocumento9 páginasConfigurarFUSESJuan Pablo Garcia LanderoAún no hay calificaciones
- ATmega 164p (ESP)Documento378 páginasATmega 164p (ESP)inalac2Aún no hay calificaciones
- Programa INT0, INT1 INT2 DSPIC30F4013Documento4 páginasPrograma INT0, INT1 INT2 DSPIC30F4013YousafValderramaLunaAún no hay calificaciones
- Curso básico de PIC 16F887Documento171 páginasCurso básico de PIC 16F887Ernesto NetoAún no hay calificaciones
- Práctica No. 9 Configuración de La Pantalla OLE ssd1306, Sensor de Temperatura LM35 y El ESP32Documento10 páginasPráctica No. 9 Configuración de La Pantalla OLE ssd1306, Sensor de Temperatura LM35 y El ESP32Xchel Adrian Hernandez AlvarezAún no hay calificaciones
- Antologia de MicrocontroladoresDocumento128 páginasAntologia de MicrocontroladorestopotopoAún no hay calificaciones
- ROBOT C-5Documento14 páginasROBOT C-5destino29Aún no hay calificaciones
- Intro EmbebidosDocumento34 páginasIntro EmbebidosHarry PradoAún no hay calificaciones
- MicroPython - Funciones de Desplazamiento de Pantalla OLED SSD1306 y Formas de Dibujo - Tutoriales Aleatorios de NerdsDocumento47 páginasMicroPython - Funciones de Desplazamiento de Pantalla OLED SSD1306 y Formas de Dibujo - Tutoriales Aleatorios de NerdsJohnny CGAún no hay calificaciones
- Micropython ESP32 Parte 2Documento8 páginasMicropython ESP32 Parte 2jimmyAún no hay calificaciones
- CONTROL MOTOR PASO A PASODocumento12 páginasCONTROL MOTOR PASO A PASOFé Gabriela100% (1)
- Programacion MSP430 TI Version 1.7 NoviembreDocumento39 páginasProgramacion MSP430 TI Version 1.7 NoviembreJaime Nunez CovarrubiasAún no hay calificaciones
- Programación Rapida en MikroC Pro For AVRDocumento6 páginasProgramación Rapida en MikroC Pro For AVRJosueAlvaradoAún no hay calificaciones
- APDS Interrupciones 2017 2 v1Documento46 páginasAPDS Interrupciones 2017 2 v1Cesar CabreraAún no hay calificaciones
- Comunicación Serial ESP32Documento7 páginasComunicación Serial ESP32Emanuel OlivarAún no hay calificaciones
- ATtiny85 El Rey de Los Mini Proyectos Con Arduinoo - 330ohms PDFDocumento4 páginasATtiny85 El Rey de Los Mini Proyectos Con Arduinoo - 330ohms PDFPaco AlemanyAún no hay calificaciones
- Controlar Motor Paso A Paso Bipolar Con ArduinoDocumento5 páginasControlar Motor Paso A Paso Bipolar Con ArduinoMartin FispaAún no hay calificaciones
- Cloud ComputingDocumento36 páginasCloud ComputingSergio FloresAún no hay calificaciones
- Practica 5 Wifi Esp32Documento2 páginasPractica 5 Wifi Esp32ANG�LICA JULIETH MADARIAGA GUEVARAAún no hay calificaciones
- Sistemas Embebidos FPGADocumento91 páginasSistemas Embebidos FPGAcarlos.otiniano9811Aún no hay calificaciones
- AIRBOX5 DatasheetDocumento2 páginasAIRBOX5 DatasheetHector ChAún no hay calificaciones
- OptiSystem (Autoguardado)Documento8 páginasOptiSystem (Autoguardado)Daniela Polanco GomezAún no hay calificaciones
- Curso Microcontroladores Apéndice PDFDocumento4 páginasCurso Microcontroladores Apéndice PDFFrancisco Javier Priego BritoAún no hay calificaciones
- Manual de Programacion de Microcontroladores Avr PDFDocumento57 páginasManual de Programacion de Microcontroladores Avr PDFAnonymous IXswcnWAún no hay calificaciones
- Usb Con Pic18f4550 y Labview - Rev 2012Documento18 páginasUsb Con Pic18f4550 y Labview - Rev 2012Maicol Javier D M80% (5)
- P01 IDE MikroC Edicion Compilacion Simulacion y Depuracion de Un ProgramaDocumento15 páginasP01 IDE MikroC Edicion Compilacion Simulacion y Depuracion de Un ProgramaaLciLAún no hay calificaciones
- Termostato Digital Controlador de TemperaturaDocumento106 páginasTermostato Digital Controlador de TemperaturalAún no hay calificaciones
- Introducción xc8Documento12 páginasIntroducción xc8Samuel Jose Torres Casarrubia100% (1)
- Generando Una Funcion de Onda DeseadaDocumento6 páginasGenerando Una Funcion de Onda DeseadaSteven Alexander Buritica MartinezAún no hay calificaciones
- Libro MIKROC Milan VerleDocumento402 páginasLibro MIKROC Milan Verlepierdonne100% (3)
- Manual Usuario Entrenador Universal Pic18Documento12 páginasManual Usuario Entrenador Universal Pic18Carlos CastilloAún no hay calificaciones
- Probador Puerto Paralelo2Documento5 páginasProbador Puerto Paralelo2Miguelina ParadaAún no hay calificaciones
- Interfaz para Puerto Paralelo LPTDocumento8 páginasInterfaz para Puerto Paralelo LPTeduard_perdomo_1Aún no hay calificaciones
- Pic 18F4550Documento11 páginasPic 18F4550seykarimAún no hay calificaciones
- Manual de Practicas ATMega 8535Documento61 páginasManual de Practicas ATMega 8535JUAN DIAZ MAMANIAún no hay calificaciones
- Electrovalvula ProyectoDocumento6 páginasElectrovalvula ProyectoJenn AlavaAún no hay calificaciones
- Codigos ArduinoDocumento14 páginasCodigos ArduinoWillbert NungarayAún no hay calificaciones
- Sistema de Llenado de Dos Tanques de Agua y RelojDocumento8 páginasSistema de Llenado de Dos Tanques de Agua y RelojEDGAR EHIRAN MORALES FRANCOAún no hay calificaciones
- Sensor Temp 4 ArduinoDocumento3 páginasSensor Temp 4 ArduinoCarolina Molina MinayaAún no hay calificaciones
- Informe de Laboratorio #4 (A31 - Concurrencia en RTOS) - Sistemas Embebidos en Tiempo RealDocumento55 páginasInforme de Laboratorio #4 (A31 - Concurrencia en RTOS) - Sistemas Embebidos en Tiempo RealSebastian PuertaAún no hay calificaciones
- Reglamento de Nivelación HagenDocumento1 páginaReglamento de Nivelación HagenCarlos Cordero PérezAún no hay calificaciones
- Reglamento de Tránsito y Vialidad Del Municipio de San Nicolás de Los Garza Nuevo LeónDocumento127 páginasReglamento de Tránsito y Vialidad Del Municipio de San Nicolás de Los Garza Nuevo LeónCarlos Cordero PérezAún no hay calificaciones
- Microcontroladores - Tarea 3Documento4 páginasMicrocontroladores - Tarea 3Carlos Cordero PérezAún no hay calificaciones
- Microcontroladores - Tarea 2Documento4 páginasMicrocontroladores - Tarea 2Carlos Cordero PérezAún no hay calificaciones
- Pia Cadcam 1843131Documento26 páginasPia Cadcam 1843131Carlos Cordero PérezAún no hay calificaciones
- Interruptores y Conmutación-1843131Documento14 páginasInterruptores y Conmutación-1843131Carlos Cordero PérezAún no hay calificaciones
- Microcontroladores - Tarea 1Documento4 páginasMicrocontroladores - Tarea 1Carlos Cordero PérezAún no hay calificaciones
- Contador Asc DSC Pic16f877a CcscompilerDocumento8 páginasContador Asc DSC Pic16f877a CcscompilerCarlos Cordero PérezAún no hay calificaciones
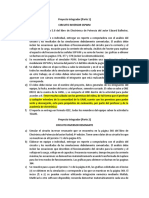
- Proyecto Integrador Inversor SSPWM e Inversor ResonanteDocumento2 páginasProyecto Integrador Inversor SSPWM e Inversor ResonanteCarlos Cordero PérezAún no hay calificaciones
- Actividad Fundamental 2 TIRISTORESDocumento1 páginaActividad Fundamental 2 TIRISTORESCarlos Cordero PérezAún no hay calificaciones
- Examen 2P Arq Robots Ene-Jun 21Documento1 páginaExamen 2P Arq Robots Ene-Jun 21Carlos Cordero PérezAún no hay calificaciones
- Tarea 3 - Programación LinealDocumento44 páginasTarea 3 - Programación LinealPaola ChavarroAún no hay calificaciones
- Selección de SoftwareDocumento2 páginasSelección de SoftwareJuan David Argüello PlataAún no hay calificaciones
- Excell LLLDocumento17 páginasExcell LLLAlias Apaza SpiritbreakerAún no hay calificaciones
- Manual Awk CastellanoDocumento118 páginasManual Awk Castellanodcastrelos2000Aún no hay calificaciones
- Introducción A Android Studio PDFDocumento15 páginasIntroducción A Android Studio PDFJader BerrioAún no hay calificaciones
- PLSQLDocumento2 páginasPLSQLAinalahmAún no hay calificaciones
- 2 Criterios Logisticos en La ProduccionDocumento12 páginas2 Criterios Logisticos en La ProduccionJOEL LIDWER CHAVEZ COTRINAAún no hay calificaciones
- Clase 9 Programación de Operaciones 2Documento32 páginasClase 9 Programación de Operaciones 2Samaria Diaz100% (1)
- PIC32 06 Caso Calculadora AvanzadaDocumento20 páginasPIC32 06 Caso Calculadora AvanzadaEudal Amachuy GuzmanAún no hay calificaciones
- Modelo de Asignacion Cros DockingDocumento16 páginasModelo de Asignacion Cros DockingYecson Vargas SolisAún no hay calificaciones
- 4 Guía Grado DécimoDocumento8 páginas4 Guía Grado DécimoAlejo RamirezAún no hay calificaciones
- Resolución de Ecuaciones No Lineales 2 - MN FISI-UNMSM 2020-IDocumento28 páginasResolución de Ecuaciones No Lineales 2 - MN FISI-UNMSM 2020-IFernandoAún no hay calificaciones
- Mda InformaticaDocumento3 páginasMda Informaticafeibert_31Aún no hay calificaciones
- Planificacion y Programacion de Acciones FormativasDocumento50 páginasPlanificacion y Programacion de Acciones FormativasEduardo CalvoAún no hay calificaciones
- MANUALDocumento10 páginasMANUALDiego Alejandro Enriquez TorresAún no hay calificaciones
- Uso de Software en La Solución de Problemas de Investigación de OperacionesDocumento6 páginasUso de Software en La Solución de Problemas de Investigación de OperacionesLOS SUPERCAMPEONESAún no hay calificaciones
- Manual de Visual Basic IDocumento11 páginasManual de Visual Basic IDavid MolinaAún no hay calificaciones
- Practica CalificadaDocumento6 páginasPractica CalificadaMaricruz Laura PinedaAún no hay calificaciones
- Mezclador de Liquidos Empleando PLCDocumento24 páginasMezclador de Liquidos Empleando PLCNelo Franno Beltran Guevara0% (1)
- 08 0411 MiDocumento187 páginas08 0411 MiSergioAún no hay calificaciones
- Caso de Aplicación Del VSMDocumento24 páginasCaso de Aplicación Del VSMGert Elias Mayer LopezAún no hay calificaciones
- Qué Son Las Macros en ExcelDocumento2 páginasQué Son Las Macros en Exceloctavio cruzAún no hay calificaciones
- Universidad Autónoma de Nuevo LeónDocumento3 páginasUniversidad Autónoma de Nuevo LeónAraceli GarciaAún no hay calificaciones
- Excel VBDocumento74 páginasExcel VBLuis Miguel Garzon IsnadoAún no hay calificaciones
- Programacion SemaforoDocumento4 páginasProgramacion SemafororaulAún no hay calificaciones
- Informe FirebirdDocumento8 páginasInforme FirebirdGenry TrigozoAún no hay calificaciones
- SQL01Documento18 páginasSQL01Javier HnAún no hay calificaciones
- Actividad 4 POODocumento6 páginasActividad 4 POOsede la esmeraldaAún no hay calificaciones
- A Través de Los Lados Del PolígonoDocumento18 páginasA Través de Los Lados Del Polígonocruz cruzAún no hay calificaciones
- Control 3Documento7 páginasControl 3Alfonso AlvaradoAún no hay calificaciones
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (86)
- Aprender Illustrator 2020 con 100 ejercicios prácticosDe EverandAprender Illustrator 2020 con 100 ejercicios prácticosAún no hay calificaciones
- Investigación de operaciones: Conceptos fundamentalesDe EverandInvestigación de operaciones: Conceptos fundamentalesCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Auditoría de seguridad informática: Curso prácticoDe EverandAuditoría de seguridad informática: Curso prácticoCalificación: 5 de 5 estrellas5/5 (1)
- Resumen de El cuadro de mando integral paso a paso de Paul R. NivenDe EverandResumen de El cuadro de mando integral paso a paso de Paul R. NivenCalificación: 5 de 5 estrellas5/5 (2)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (116)
- ¿Cómo piensan las máquinas?: Inteligencia artificial para humanosDe Everand¿Cómo piensan las máquinas?: Inteligencia artificial para humanosCalificación: 5 de 5 estrellas5/5 (1)
- Excel 2021 y 365 Paso a Paso: Paso a PasoDe EverandExcel 2021 y 365 Paso a Paso: Paso a PasoCalificación: 5 de 5 estrellas5/5 (12)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Estructuras de Datos Básicas: Programación orientada a objetos con JavaDe EverandEstructuras de Datos Básicas: Programación orientada a objetos con JavaCalificación: 5 de 5 estrellas5/5 (1)
- ChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...De EverandChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...Calificación: 5 de 5 estrellas5/5 (4)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDe EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroCalificación: 4 de 5 estrellas4/5 (1)
- El trading online de una forma sencilla: Cómo convertirse en un inversionista online y descubrir las bases para lograr un trading de éxitoDe EverandEl trading online de una forma sencilla: Cómo convertirse en un inversionista online y descubrir las bases para lograr un trading de éxitoCalificación: 4 de 5 estrellas4/5 (30)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- La biblia del e-commerce: Los secretos de la venta online. Más de mil ideas para vender por internetDe EverandLa biblia del e-commerce: Los secretos de la venta online. Más de mil ideas para vender por internetCalificación: 5 de 5 estrellas5/5 (7)
- Organizaciones Exponenciales: Por qué existen nuevas organizaciones diez veces más escalables y rentables que la tuya (y qué puedes hacer al respecto)De EverandOrganizaciones Exponenciales: Por qué existen nuevas organizaciones diez veces más escalables y rentables que la tuya (y qué puedes hacer al respecto)Calificación: 4.5 de 5 estrellas4.5/5 (11)
- AngularJS: Conviértete en el profesional que las compañías de software necesitan.De EverandAngularJS: Conviértete en el profesional que las compañías de software necesitan.Calificación: 3.5 de 5 estrellas3.5/5 (3)
- APLICACIONES PRACTICAS CON EXCELDe EverandAPLICACIONES PRACTICAS CON EXCELCalificación: 4.5 de 5 estrellas4.5/5 (6)
- Gestión de Proyectos con Microsoft Project 2013: Software de gestión de proyectosDe EverandGestión de Proyectos con Microsoft Project 2013: Software de gestión de proyectosCalificación: 5 de 5 estrellas5/5 (3)
- Configuración y usos de un mapa de procesosDe EverandConfiguración y usos de un mapa de procesosCalificación: 4.5 de 5 estrellas4.5/5 (18)
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasDe EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasCalificación: 4.5 de 5 estrellas4.5/5 (14)
- LAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.De EverandLAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.Calificación: 4.5 de 5 estrellas4.5/5 (54)
- Seguridad e higiene en el trabajo: Un enfoque integralDe EverandSeguridad e higiene en el trabajo: Un enfoque integralAún no hay calificaciones