También podría gustarte
- Leyes de Kirchhoff Con Ejercicios de Ejemplos FacilDocumento7 páginasLeyes de Kirchhoff Con Ejercicios de Ejemplos FacilАндэрь ЗорьгAún no hay calificaciones
- Arduino Leonardo - Geeky TheoryDocumento10 páginasArduino Leonardo - Geeky TheoryАндэрь ЗорьгAún no hay calificaciones
- Factor de Potencia - Que Es, Calcularlo, Corregirlo y EjerciciosDocumento27 páginasFactor de Potencia - Que Es, Calcularlo, Corregirlo y EjerciciosАндэрь ЗорьгAún no hay calificaciones
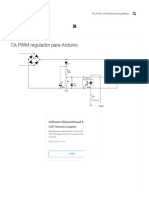
- CA PWM Regulador para Arduino: (/) Por Favor, Introduzca Una PalabraDocumento11 páginasCA PWM Regulador para Arduino: (/) Por Favor, Introduzca Una PalabraАндэрь ЗорьгAún no hay calificaciones
- Artículo de Opinión TranzabilidadDocumento2 páginasArtículo de Opinión TranzabilidadElisaul Molina AvilaAún no hay calificaciones
- Estrategias Más Adecuada Que Se Aplicarían para La Gestión Del Departamento de MantenimientoDocumento8 páginasEstrategias Más Adecuada Que Se Aplicarían para La Gestión Del Departamento de MantenimientoAnonymous 5IIs3BEnFAún no hay calificaciones
- PURITRONICDocumento14 páginasPURITRONICJavier Ortega ZanchesAún no hay calificaciones
- Historia Social de La Tecnología - GiulianoDocumento4 páginasHistoria Social de La Tecnología - GiulianoJavier YanantuoniAún no hay calificaciones
- Laboratorio 1 - Automata Programable Plc-2019-2Documento1 páginaLaboratorio 1 - Automata Programable Plc-2019-2anthony zegarra ochoaAún no hay calificaciones
- Paper de Charla, Rodrigo JimenezDocumento5 páginasPaper de Charla, Rodrigo JimenezRodrigo Alejandro Jimenez BarriosAún no hay calificaciones
- Como Se Instala Un Suelo RadianteDocumento4 páginasComo Se Instala Un Suelo RadianteLAURAAún no hay calificaciones
- Inspecciones de Seguridad A TanquesDocumento5 páginasInspecciones de Seguridad A TanquesJohanna PerezAún no hay calificaciones
- KSB Meganorm: Bomba Centrífuga para Uso General Mega ISO 2858Documento16 páginasKSB Meganorm: Bomba Centrífuga para Uso General Mega ISO 2858Eduar GomezAún no hay calificaciones
- Semblanza Químico Luis Ernesto Miramontes CárdenasDocumento2 páginasSemblanza Químico Luis Ernesto Miramontes CárdenasIselita HernándezAún no hay calificaciones
- Arreglo BidimensionalesDocumento16 páginasArreglo BidimensionalesJose Armando Tiznado UbillusAún no hay calificaciones
- 8.1-Despliegue Participación de SUDIME GGE Segunda ParteDocumento10 páginas8.1-Despliegue Participación de SUDIME GGE Segunda Parteluis Ricardo olivos salazarAún no hay calificaciones
- Análisis Tipológico - Biblioteca CríticaDocumento66 páginasAnálisis Tipológico - Biblioteca CríticaBryan Montero RamirezAún no hay calificaciones
- Análisis de Información Del Negocio Con Power BI para ExcelDocumento3 páginasAnálisis de Información Del Negocio Con Power BI para ExcelJavier Gamboa CruzadoAún no hay calificaciones
- Bosch Ebike Battery Guide MY2020 ESDocumento19 páginasBosch Ebike Battery Guide MY2020 ESrodrigo alonso barrios gaticaAún no hay calificaciones
- Edgar 1Documento53 páginasEdgar 1hamscribdAún no hay calificaciones
- Prueba de U Mann WhitneyDocumento18 páginasPrueba de U Mann WhitneyVianey GerardoAún no hay calificaciones
- FA Monte IncasaniDocumento24 páginasFA Monte IncasaniElioAún no hay calificaciones
- Diseño Del Pozo ProfundoDocumento8 páginasDiseño Del Pozo ProfundoGerluis GonzalezAún no hay calificaciones
- Aislan Colchoneta GranuladoDocumento2 páginasAislan Colchoneta GranuladoRaul Monroe FuentesAún no hay calificaciones
- Monografia Sistemas OperativosDocumento57 páginasMonografia Sistemas OperativosAduvier Alex60% (5)
- Mapa Conceptual Aprendiz SenaDocumento1 páginaMapa Conceptual Aprendiz SenaDIANA CAROLINA ARENAS74% (19)
- Consejos Útiles para Respetar El Medio Ambiente en Tu Vida DiariaDocumento5 páginasConsejos Útiles para Respetar El Medio Ambiente en Tu Vida DiariaJazminsiita GlezAún no hay calificaciones
- Lab N°3 - Circuitos de Corriente AlternaDocumento46 páginasLab N°3 - Circuitos de Corriente AlternaErnesto Vic Holg QuispeAún no hay calificaciones
- El Número de ReynoldsDocumento3 páginasEl Número de ReynoldsFernandaYanixelRiveraRosasAún no hay calificaciones
- B - Tratamiento Agua Tarifa PVP SalvadorEscodaDocumento45 páginasB - Tratamiento Agua Tarifa PVP SalvadorEscodaRAún no hay calificaciones
- Precios PCDocumento2 páginasPrecios PCsebas92Aún no hay calificaciones
- Aproximacion Polinomial Por Minimos CuadradosDocumento8 páginasAproximacion Polinomial Por Minimos CuadradosOscar MayorgaAún no hay calificaciones
- Como Realizar Un DiagnosticoDocumento13 páginasComo Realizar Un DiagnosticoMarcos OrozcoAún no hay calificaciones
- Manual de Identidad CorporativaDocumento33 páginasManual de Identidad CorporativatheanndroidAún no hay calificaciones