0% encontró este documento útil (0 votos)
300 vistas24 páginasMatrices y Determinantes en Álgebra Lineal
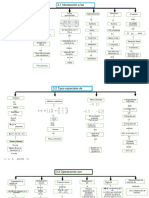
Las matrices se introdujeron en 1850 y su teoría se desarrolló en las décadas siguientes. Se utilizan para representar sistemas de ecuaciones lineales y aparecen en diversas áreas como geometría, estadística y física. Una matriz está compuesta por elementos organizados en filas y columnas, y su orden viene determinado por el número de filas y columnas. Existen diversas operaciones con matrices como suma, resta, multiplicación y potenciación.
Cargado por
Can3lo μDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd
0% encontró este documento útil (0 votos)
300 vistas24 páginasMatrices y Determinantes en Álgebra Lineal
Las matrices se introdujeron en 1850 y su teoría se desarrolló en las décadas siguientes. Se utilizan para representar sistemas de ecuaciones lineales y aparecen en diversas áreas como geometría, estadística y física. Una matriz está compuesta por elementos organizados en filas y columnas, y su orden viene determinado por el número de filas y columnas. Existen diversas operaciones con matrices como suma, resta, multiplicación y potenciación.
Cargado por
Can3lo μDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd