También podría gustarte
- ¿Cómo Indagamos La Resistencia Del Plástico?Documento6 páginas¿Cómo Indagamos La Resistencia Del Plástico?Nemias Joshua CZ TlpvAún no hay calificaciones
- MATRIZ DE ACCESO - InformaticaDocumento23 páginasMATRIZ DE ACCESO - InformaticaYonatan VázquezAún no hay calificaciones
- Informe 1 Topografia 2Documento20 páginasInforme 1 Topografia 2Chelsea Blandon100% (2)
- EVEREST Ultimate EditionDocumento617 páginasEVEREST Ultimate Editionagusgay_24100% (1)
- So Luci OnesDocumento74 páginasSo Luci OnesCarlos Enrique Pijo PerezAún no hay calificaciones
- Enrutamiento Estático-Por Defecto-DinámicoDocumento15 páginasEnrutamiento Estático-Por Defecto-DinámicoAndres TiapaAún no hay calificaciones
- Parametros PblacionalesDocumento28 páginasParametros Pblacionaleselmer taipe vargasAún no hay calificaciones
- El SilogismoDocumento11 páginasEl SilogismoSantos AlonzoAún no hay calificaciones
- S04.s1 - MaterialDocumento25 páginasS04.s1 - Materialluis angel pablo pajueloAún no hay calificaciones
- Diseño de Farmacos-TesisDocumento17 páginasDiseño de Farmacos-Tesisleslie cruzAún no hay calificaciones
- Elementos Del InterésDocumento2 páginasElementos Del InterésDaniel GuzmanAún no hay calificaciones
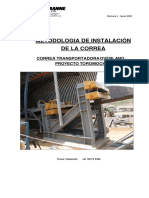
- 200-CV-003 Belt Instalation Procedure (Spanish)Documento42 páginas200-CV-003 Belt Instalation Procedure (Spanish)Hernan Kana AranaAún no hay calificaciones
- Catalizadores 2 BachDocumento3 páginasCatalizadores 2 BachJulio SanchezAún no hay calificaciones
- Semana 7 Determinacion de La Actividad Enzimática de La Alfa Amilasa VegetalDocumento4 páginasSemana 7 Determinacion de La Actividad Enzimática de La Alfa Amilasa VegetalJose David Medina Moreno50% (2)
- Class 3Documento10 páginasClass 3kbredeleiAún no hay calificaciones
- Geometria Estadistica 9Documento6 páginasGeometria Estadistica 9claudia ruedaAún no hay calificaciones
- Tumores OsteoarticularesDocumento49 páginasTumores OsteoarticularesRicardo RochaAún no hay calificaciones
- P-A-B-5toSec-Gen 2021Documento3 páginasP-A-B-5toSec-Gen 2021Gabrielita Landivar MoraAún no hay calificaciones
- Con CCT 76 1975 e TransaxDocumento80 páginasCon CCT 76 1975 e Transaxrev_copernicanaAún no hay calificaciones
- Filosofia Del ConvencionalismoDocumento4 páginasFilosofia Del ConvencionalismoEduardo Mamani OchoaAún no hay calificaciones
- Cañerías de ConducciónDocumento8 páginasCañerías de ConducciónLucas Ezequiel BancoAún no hay calificaciones
- Capítulo 2 Ejercicios Propuestos para Primer ParcialDocumento4 páginasCapítulo 2 Ejercicios Propuestos para Primer ParcialDaniel CañonAún no hay calificaciones
- 0 - 221402 - Estadística y Análisis de DecisionesDocumento11 páginas0 - 221402 - Estadística y Análisis de DecisionesJORGE LUIS AQUIJE GAMBOAAún no hay calificaciones
- Soluciones Canguro 2023 CADETEDocumento3 páginasSoluciones Canguro 2023 CADETEAgos MoralesAún no hay calificaciones
- Mecanica Corporal PDFDocumento38 páginasMecanica Corporal PDFElidad Zenaida Pérez Santiago100% (1)
- Guia 1 Elaboración de Dulce de LecheDocumento3 páginasGuia 1 Elaboración de Dulce de LechebriannyAún no hay calificaciones
- 1º Parte CLASE 7 FISICO-QUÍMICA DEL SUELO A Propiedades de Las Arcillas 2020Documento111 páginas1º Parte CLASE 7 FISICO-QUÍMICA DEL SUELO A Propiedades de Las Arcillas 2020Jose SastreAún no hay calificaciones
- Catalogo General 2019.evaDocumento207 páginasCatalogo General 2019.evamonicamartingomezAún no hay calificaciones
- Cap. - III - Vectores - ApuntesDocumento30 páginasCap. - III - Vectores - ApuntesJefferson ApdelAún no hay calificaciones
- Diagrama de Cuerpo Libre - Leyes de NewtonDocumento10 páginasDiagrama de Cuerpo Libre - Leyes de NewtonLuis Hernandez MarcosAún no hay calificaciones