También podría gustarte
- Formatos de MantenimeintoDocumento18 páginasFormatos de MantenimeintoJosé Luis ErazoAún no hay calificaciones
- Carta de RecomendacionDocumento1 páginaCarta de RecomendacionJosé Luis Erazo100% (1)
- Informe de Nivelacion 4Documento24 páginasInforme de Nivelacion 4Lucho Corrales CajoAún no hay calificaciones
- Sersa Ec Portafolio 1Documento11 páginasSersa Ec Portafolio 1José Luis ErazoAún no hay calificaciones
- Tesis 1revDocumento93 páginasTesis 1revJosé Luis ErazoAún no hay calificaciones
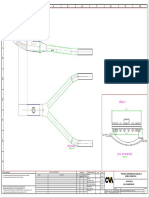
- Bifurcador Ensamble15!04!2021Documento1 páginaBifurcador Ensamble15!04!2021José Luis ErazoAún no hay calificaciones
- Tensores I.4 Estudio TecnicoDocumento30 páginasTensores I.4 Estudio TecnicoJosé Luis ErazoAún no hay calificaciones
- Proyecto Final Grupo1Documento11 páginasProyecto Final Grupo1José Luis ErazoAún no hay calificaciones
- Anexo 2 - Formulario para Salidas Al ExteriorDocumento3 páginasAnexo 2 - Formulario para Salidas Al ExteriorJosé Luis ErazoAún no hay calificaciones
- PRUEBADocumento1 páginaPRUEBAJosé Luis ErazoAún no hay calificaciones
- Carta TécnicoDocenteDocumento1 páginaCarta TécnicoDocenteJosé Luis ErazoAún no hay calificaciones
- Metalurgia de Polvos PDFDocumento55 páginasMetalurgia de Polvos PDFJosé Luis ErazoAún no hay calificaciones
- Las 7PDocumento2 páginasLas 7PJosé Luis ErazoAún no hay calificaciones
- Diagrama TorsionalDocumento11 páginasDiagrama TorsionalJosé Luis ErazoAún no hay calificaciones
- LT Refrigeración NietoDocumento12 páginasLT Refrigeración NietoJosé Luis ErazoAún no hay calificaciones
- Capítulo 10Documento4 páginasCapítulo 10luis arauzAún no hay calificaciones
- Trabajos en Caliente - Pacífico SegurosDocumento30 páginasTrabajos en Caliente - Pacífico SegurosRosemary VillcaAún no hay calificaciones
- Motor de Arranque 2 TecsupDocumento7 páginasMotor de Arranque 2 TecsupJonathan Damian ContrerasAún no hay calificaciones
- Miscela 2Documento4 páginasMiscela 2juan carlosAún no hay calificaciones
- 5 Ejercicios Adaptados A IngDocumento7 páginas5 Ejercicios Adaptados A IngJose Anderson Guevara MegoAún no hay calificaciones
- MS-DW-0034!01!1111 ES - Manual de Servicio LP7 840, LP7 821 y LP7 440Documento37 páginasMS-DW-0034!01!1111 ES - Manual de Servicio LP7 840, LP7 821 y LP7 440ceferinoAún no hay calificaciones
- Lámparas de Alta Intensidad de DescargaDocumento21 páginasLámparas de Alta Intensidad de DescargaPepechuy Vega0% (1)
- Ensayo de Corte DirectoDocumento7 páginasEnsayo de Corte DirectoJherson MilAún no hay calificaciones
- Dinamica EjerciciosDocumento51 páginasDinamica EjerciciosEder ChingaAún no hay calificaciones
- Cálculo de Luminarias para La PurificadoraDocumento20 páginasCálculo de Luminarias para La PurificadoraAlan Vázquez GonzálezAún no hay calificaciones
- Diseño Cabezal Extrusion PDFDocumento297 páginasDiseño Cabezal Extrusion PDFBruno VelascoAún no hay calificaciones
- Ejercicios ELVDocumento16 páginasEjercicios ELVÁlvaro Alcayaga CuadraAún no hay calificaciones
- Quimica Ejercicios PracticoteoricosDocumento15 páginasQuimica Ejercicios PracticoteoricosMaria Lufan RodriguezAún no hay calificaciones
- Ejemplo DesarenadorDocumento8 páginasEjemplo DesarenadorMelqui Vela Llanos0% (1)
- Lab Pandeo S2 G5Documento5 páginasLab Pandeo S2 G5Luis BenitezAún no hay calificaciones
- Seminario 3Documento7 páginasSeminario 3MarcosAún no hay calificaciones
- Metodologia de La Investigacion Proyecto SeparadoresDocumento29 páginasMetodologia de La Investigacion Proyecto SeparadoresJhonnSernaGutierrezAún no hay calificaciones
- Reología 2015Documento31 páginasReología 2015mdsanchezo8373Aún no hay calificaciones
- Esp. Tecnicas - PPR PN 10 - Blue Ocean (Uk) - AcDocumento2 páginasEsp. Tecnicas - PPR PN 10 - Blue Ocean (Uk) - AcivanAún no hay calificaciones
- Puntos de La Grafica EsfuerzoDocumento4 páginasPuntos de La Grafica EsfuerzojulioleijaAún no hay calificaciones
- Remt Viga LaminadaDocumento15 páginasRemt Viga LaminadaSebastián GamboaAún no hay calificaciones
- CortanteDocumento60 páginasCortantefernando trujillano sarmientoAún no hay calificaciones
- Actividad en ClaseDocumento2 páginasActividad en ClaseJuan Felipe Díaz LondoñoAún no hay calificaciones
- Fallas de Soldaduras en GPU de Laptos y Consolas de VideojuegosDocumento58 páginasFallas de Soldaduras en GPU de Laptos y Consolas de VideojuegosLuis DuarteAún no hay calificaciones
- Funcionamiento de Los Tuneles de Viento y Su Aplicación en El Diseño AeronauticoDocumento2 páginasFuncionamiento de Los Tuneles de Viento y Su Aplicación en El Diseño AeronauticoAlex Mero M0% (1)
- Clase Quimica Grado DecimoDocumento8 páginasClase Quimica Grado Decimohernan sierraAún no hay calificaciones
- QuimicaDocumento5 páginasQuimicaEztevan BakerAún no hay calificaciones
- EnsayoDocumento2 páginasEnsayoMiguel Madrigal BAún no hay calificaciones