También podría gustarte
- Problemas de Geometria Resueltos 2Documento19 páginasProblemas de Geometria Resueltos 2Denise TaylorAún no hay calificaciones
- VC - PH para La Media y ProporciónDocumento44 páginasVC - PH para La Media y ProporciónVamos Tu PuedesAún no hay calificaciones
- S04.s2 - RECTAS PARALELAS Y ORTOGONALES EN R2Documento18 páginasS04.s2 - RECTAS PARALELAS Y ORTOGONALES EN R2Gianfranco Vega Milón100% (1)
- Tarea Semana 7Documento6 páginasTarea Semana 7Vilcarana Jeferson R.Aún no hay calificaciones
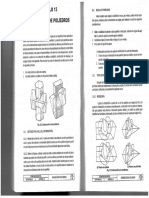
- CAPITULO 13 Interseccones de PoliedrosDocumento21 páginasCAPITULO 13 Interseccones de PoliedrosFERNANDO MIGUEL EMILIO DE LA ROSA TORRESAún no hay calificaciones
- CG-Sem5-Ejercicios ResueltosDocumento14 páginasCG-Sem5-Ejercicios ResueltosJhho NnyAún no hay calificaciones
- LimitesDocumento1 páginaLimitesakamaru100% (1)
- Grupo 1 Laboratorio 4Documento6 páginasGrupo 1 Laboratorio 4Xiomara Lopez del RioAún no hay calificaciones
- Práctica Dirigida #1 Estática 2023 10-1Documento4 páginasPráctica Dirigida #1 Estática 2023 10-1Richard Randy Lupa CazaAún no hay calificaciones
- Sem 4 Ses 7 r2 Prod. Escalar. Ortog.-1Documento1 páginaSem 4 Ses 7 r2 Prod. Escalar. Ortog.-1Rafael Gustavo GonzalesAún no hay calificaciones
- 03 Matematica Practica 02 Ceprunsa 2022 I FaseDocumento7 páginas03 Matematica Practica 02 Ceprunsa 2022 I FaseDesaprende con GonzalesAún no hay calificaciones
- Tabla T Distribución T de StudentDocumento1 páginaTabla T Distribución T de StudentJoel100% (1)
- Ejercicios - Voluntarios Puntos, Rectas y Planos en El Espacio.Documento8 páginasEjercicios - Voluntarios Puntos, Rectas y Planos en El Espacio.AMYNNXXXXAún no hay calificaciones
- X-1 Año-Sem 1 A 7 PDFDocumento14 páginasX-1 Año-Sem 1 A 7 PDFAre AguAún no hay calificaciones
- P - Sem 4 - Ses7 - RECTA EN R2 PDFDocumento22 páginasP - Sem 4 - Ses7 - RECTA EN R2 PDFJordy SanchezAún no hay calificaciones
- Dinámica, Trabajo y EnergíaDocumento5 páginasDinámica, Trabajo y EnergíaManuel Suare'z100% (1)
- Ejercicios Propuestos de Ecuacion Fundamental de La Hidrostatica - ElierDocumento10 páginasEjercicios Propuestos de Ecuacion Fundamental de La Hidrostatica - ElierpibelimachiAún no hay calificaciones
- CUESTIONARIO Labo 1 Fisica 3Documento8 páginasCUESTIONARIO Labo 1 Fisica 3Luis Angel Farfan CandelarioAún no hay calificaciones
- Guia4Calculo20 PDFDocumento3 páginasGuia4Calculo20 PDFLuis Jose Rondón CastilloAún no hay calificaciones
- Rugosidad SuperficialDocumento11 páginasRugosidad SuperficialRonAún no hay calificaciones
- Proyecto Pendulo SimpleDocumento10 páginasProyecto Pendulo SimpleXaresAún no hay calificaciones
- S04.s1 - PPT Conceptos de GeometríaDocumento19 páginasS04.s1 - PPT Conceptos de GeometríaBruno Estela ObregonAún no hay calificaciones
- Árboles DirigidosDocumento7 páginasÁrboles Dirigidossonia50% (2)
- 04 Movimiento Uniformemente VariadoDocumento5 páginas04 Movimiento Uniformemente VariadoElar Alayo VillanuevaAún no hay calificaciones
- S02.s1 - Sistema de EcuacionesDocumento17 páginasS02.s1 - Sistema de EcuacionesLuis Miguel Alcazar AceroAún no hay calificaciones
- Informe 3 Fisica MRU MRUVDocumento18 páginasInforme 3 Fisica MRU MRUVritaAún no hay calificaciones
- Ley de Hooke y Cambios de Energía PotencialDocumento3 páginasLey de Hooke y Cambios de Energía PotencialLuis Soto VhalquiAún no hay calificaciones
- Codificador 4 A 2Documento20 páginasCodificador 4 A 2andresfvmAún no hay calificaciones
- Ejercicio 1 y 2Documento2 páginasEjercicio 1 y 2Nathaly AguiarAún no hay calificaciones
- T2 - Semana 7 - Caf IiDocumento8 páginasT2 - Semana 7 - Caf IiMax VicuñaAún no hay calificaciones
- Lista de Ejercicios 1.10. Angulo Entre Dos RectasDocumento1 páginaLista de Ejercicios 1.10. Angulo Entre Dos RectasNOYOLA GÓMEZ EMILIO DAMIAN100% (1)
- Avance Del Proyecto v3Documento24 páginasAvance Del Proyecto v3Onasis PolicarpoAún no hay calificaciones
- Analisis de Un Experimento 5 - Campo Magnetico SolenoideDocumento9 páginasAnalisis de Un Experimento 5 - Campo Magnetico SolenoideAlexander DavidAún no hay calificaciones
- Teoria VectoresDocumento18 páginasTeoria VectoresEnric Pons GuerolaAún no hay calificaciones
- S07.s1 - Material - ComplementoDocumento23 páginasS07.s1 - Material - ComplementoLuis Armando Delgado CastroAún no hay calificaciones
- Callahuara Jallaza Arnold AlexDocumento149 páginasCallahuara Jallaza Arnold AlexArnold Alex Callahuara100% (2)
- Guia de Practicas Campo Electrico Fisica 3Documento6 páginasGuia de Practicas Campo Electrico Fisica 3Josoe AtachimanAún no hay calificaciones
- S Sem6 Ses2 OhmDocumento2 páginasS Sem6 Ses2 OhmDiana Guillen0% (1)
- Fuerzas Entre Conductores Paralelos JDocumento12 páginasFuerzas Entre Conductores Paralelos JJoel GonzalesAún no hay calificaciones
- Sem1 2 - Curvas y Superficies de NivelDocumento5 páginasSem1 2 - Curvas y Superficies de NivelAlainAedo100% (1)
- Deber No. 1 - Ejercicios Máximos y MínimosDocumento2 páginasDeber No. 1 - Ejercicios Máximos y MínimosStvn BstAún no hay calificaciones
- S04.s2 - Resolver EjerciciosDocumento2 páginasS04.s2 - Resolver EjerciciosJhonson Canchari0% (1)
- HT 7Documento7 páginasHT 7Antonio Lunasco MendozaAún no hay calificaciones
- SEXTO LABORATORIO Electricos II UNTELSDocumento11 páginasSEXTO LABORATORIO Electricos II UNTELSLuiz GerardoAún no hay calificaciones
- Ejercicios Semana 8Documento10 páginasEjercicios Semana 8Vilcarana Jeferson R.Aún no hay calificaciones
- La Ley de AmpèreDocumento21 páginasLa Ley de AmpèreNABEAún no hay calificaciones
- Examen Parcial (B) Electricidad - y - Magnetiso 2021-1Documento2 páginasExamen Parcial (B) Electricidad - y - Magnetiso 2021-1Andrea contrerasAún no hay calificaciones
- Potencial EléctricoDocumento8 páginasPotencial EléctricoKarloz OjedaAún no hay calificaciones
- Geometria Analitica1Documento5 páginasGeometria Analitica1javierjt67% (3)
- Bobina de Tesla ProyectoDocumento6 páginasBobina de Tesla ProyectoFermin CastroAún no hay calificaciones
- Anexo 1Documento12 páginasAnexo 1Oscar Niño Bernal0% (1)
- Unidad 2 Rompimiento de Los Lazos Con España - (Avances)Documento71 páginasUnidad 2 Rompimiento de Los Lazos Con España - (Avances)Diego A. Bernal B.Aún no hay calificaciones
- Teoría y Cuestionario PrevioDocumento4 páginasTeoría y Cuestionario PreviobremellAún no hay calificaciones
- Taller 5Documento6 páginasTaller 5Kevin Paul LeonAún no hay calificaciones
- Clase 03 Distribución Normal - Tipificación PDFDocumento19 páginasClase 03 Distribución Normal - Tipificación PDFJhons Messi Dionicio RamirezAún no hay calificaciones
- Informe Nº6 Fisica DinamicaDocumento7 páginasInforme Nº6 Fisica DinamicaAuzbel OntiverosAún no hay calificaciones
- Micro Taller N°7Documento4 páginasMicro Taller N°7Andersson NavarroAún no hay calificaciones
- 16avasemana (A) Unid.4 Geom Analítica TridimDocumento43 páginas16avasemana (A) Unid.4 Geom Analítica TridimAnais Lucero Zambrano PortillaAún no hay calificaciones
- Introducción a la geometría analíticaDe EverandIntroducción a la geometría analíticaCalificación: 4 de 5 estrellas4/5 (1)
- Examen Matemáticas II de Navarra (Extraordinaria de 2019) (WWW - Examenesdepau.com)Documento3 páginasExamen Matemáticas II de Navarra (Extraordinaria de 2019) (WWW - Examenesdepau.com)JonAún no hay calificaciones
- Unidad 2 - 3 Expres - Fact MB 2020-1S PDFDocumento55 páginasUnidad 2 - 3 Expres - Fact MB 2020-1S PDFSantiago BravoAún no hay calificaciones
- Ejercicios Espacios VectorialesDocumento2 páginasEjercicios Espacios VectorialesrodrigoAún no hay calificaciones
- Tema 4-Clase 10Documento20 páginasTema 4-Clase 10Oriana RafaelAún no hay calificaciones
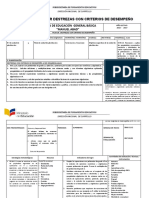
- Planificacion Por Destrezas Con CriterioDocumento6 páginasPlanificacion Por Destrezas Con CriterioJeffry Ian GomezAún no hay calificaciones
- 02 GeptecneDocumento79 páginas02 GeptecneH V Vera RuizAún no hay calificaciones
- Pre Tarea - Introducción A Los Procesos AritméticosDocumento13 páginasPre Tarea - Introducción A Los Procesos AritméticosPatricia Leidy Baltazar Marin100% (1)
- Sistema de Ecuaciones 2X2Documento23 páginasSistema de Ecuaciones 2X2Danna CruzaleguiAún no hay calificaciones
- CombinatoriasDocumento13 páginasCombinatoriasYuliana Vargas RiveraAún no hay calificaciones
- Calvo Introducción Alme 2006Documento6 páginasCalvo Introducción Alme 2006Irland Alberto Alvarez LezamaAún no hay calificaciones
- Guia de Ejercicios Autonomo I MCDocumento3 páginasGuia de Ejercicios Autonomo I MCTrueno16Aún no hay calificaciones
- Solución Examen Final Parte I 03-20Documento4 páginasSolución Examen Final Parte I 03-20CARLOS RODRIGO LOPEZ LOPEZAún no hay calificaciones
- Clases de SucesionesDocumento4 páginasClases de SucesionesJames MachadoAún no hay calificaciones
- Mapa DerivadasDocumento3 páginasMapa DerivadasOscar Dario PORTILLO MESTRAAún no hay calificaciones
- Líneas RectasDocumento12 páginasLíneas RectasVictor Jassiel Guifarro EscobarAún no hay calificaciones
- Algebra Lineal 8va Edicion - Bernard Kolman David R. Hill 10-19Documento10 páginasAlgebra Lineal 8va Edicion - Bernard Kolman David R. Hill 10-19Cynthia FuhrmanAún no hay calificaciones
- Ecuaciones ExponencialesDocumento4 páginasEcuaciones ExponencialesLuiz Santiyan100% (2)
- Modelado CinemáticoDocumento45 páginasModelado CinemáticoLuis Aké MéndezAún no hay calificaciones
- Transformaciones en CoordenadasDocumento18 páginasTransformaciones en CoordenadasAmIn20122Aún no hay calificaciones
- Concavidad y Punto de InfleccióDocumento10 páginasConcavidad y Punto de InfleccióyolatlAún no hay calificaciones
- 9.2 Retroalimentación TA2Documento2 páginas9.2 Retroalimentación TA2Selene CondoriAún no hay calificaciones
- 5 Propiedades de Los Armónicos EsféricosDocumento16 páginas5 Propiedades de Los Armónicos EsféricosJean 96Aún no hay calificaciones
- TPG 1Documento21 páginasTPG 1Cami Pérez OvalleAún no hay calificaciones
- Ortogonalizacion de FuncionesDocumento7 páginasOrtogonalizacion de FuncionesAlex LoachaminAún no hay calificaciones
- Taller Practico-Matematica 5to. AñoDocumento2 páginasTaller Practico-Matematica 5to. AñoJesus Leonardo0% (1)
- Comandos Autocad de DibujoDocumento4 páginasComandos Autocad de DibujoAxllx VictorAún no hay calificaciones
- Reglas Importantes para Resolver Operaciones AritméticasDocumento8 páginasReglas Importantes para Resolver Operaciones Aritméticasalexanderlona20Aún no hay calificaciones
- Cuadernillo 2° Año InsvDocumento52 páginasCuadernillo 2° Año InsvFabian GomezAún no hay calificaciones
- Tarea Vespertinos UnabDocumento5 páginasTarea Vespertinos UnabCesar Antonio Villarreal GallardoAún no hay calificaciones