
Documentos de Académico
Documentos de Profesional
Documentos de Cultura
Colaboraciones: Un Método de Optimizacion de Estructuras Articuladas Estáticamente Determinadas
Cargado por
Cristian Camilo Quitian MoralesTítulo original
Derechos de autor
Formatos disponibles
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Denunciar este documentoCopyright:
Formatos disponibles
Colaboraciones: Un Método de Optimizacion de Estructuras Articuladas Estáticamente Determinadas
Cargado por
Cristian Camilo Quitian MoralesCopyright:
Formatos disponibles
colaboraciones
UN MÉTODO DE OPTIMIZACION DE ESTRUCTURAS
ARTICULADAS ESTÁTICAMENTE DETERMINADAS
(METHOD FOR OPTIMIZATION OF STATICALLY DETERMINED ARTICULATED STRUCTURES)
Parras Galán, L, Montes Tubío, M., García Guzmán, A., Entrenas Ángulo, J. A., 406-3
y De Dios Palomares, R.
Dres. I n g e n i e r o s A g r ó n o m o s . ETS d e I n g e n i e r o s A g r ó n o m o s ( U n i v e r s i d a d d e C ó r d o b a )
RESUMEN SUMMARY
Se ha desarrollado un algoritrr)o de programación matemática An algorithm of mathematical programmation for the optimum
para el dimensionamiento óptimo de estructuras articuladas dis'fgn of iso-static articúlate structures has been developed.
isostáticas. El algoritmo propuesto se caracteriza por: The characteristics of the proposed algorithm are: a) It not
a) No requerir que la función objetivo o las ecuaciones de requires that the objective function or the restriction equations
restricción sean derivables. b) Utilizan métodos de optimización be derivable. b) They use unidimensional methods of
unidimensionales para pasar de una solución dada a otra mejor, unidimensional optimization ío pass over from a g/Ven so/ut/on
c) Introducir procedimientos aleatorios para obtener información to a better one. c) To introduce contingent procedures to obtain
que conduce a una solución mejor. Estas características lo Information which leads to a better solution. Those characteristics
hacen especialmente indicado para funciones no explícitas, make it specially recommended for non-explicit functions, costly
costosas en su evaluación y con gran cantidad de mínimos in its evaluation with a great deal of relative mínimums. The
relativos. Se ilustra el método con dos ejemplos de diseño method is explained by two exampies of óptima! design of
óptimo de estructuras articuladas estáticamente determinadas. statiscally determined articulated structures.
1. Planteamiento teórico y desarrollo histórico las ecuaciones de ligadura, en el trabajo que nos
ocupa, no es posible plantearlas de forma explícita
Bajo el nombre de programación matemática se en función de las variables de diseño, y por tanto
agrupan un conjunto de métodos que buscan el conocer sus derivadas; los métodos existentes más
óptimo (máximo o mínimo) de una función F(X), conocidos son los de búsqueda aleatoria (3), Ro-
para X £ R, siendo R: senbrock (13), PoweII (12), de los poliedros flexi-
bles (1), y numerosas variantes a los anteriores.
R = {X g ¡ ( X ) = 0 , i = 1 , m ; g i ( X ) < 0 , i = m + 1,n}
Paralelamente al desarrollo de los modelos mate-
donde gi(X) es el conjunto de restricciones que li- máticos, y como consecuencia de ello, se ha produ-
mitan los posibles valores de F(X). cido un gran avance en la optimización estructural,
que tuvo como precursores a Maxwell (5) y Mit-
Los primeros métodos de optimización se deben a chell (6). Dos«han sido los enfoques que se han se-
los trabajos de Newton, Lagrange y Cauchy, pero guido: La optimización estructural con geometría fi-
los mayores avances han tenido lugar en la segunda ja, cuyo objetivo es el de dimensionar los elementos
mitad de este siglo, cuando los medios de cálculo que componen una estructura con las secciones
electrónico han permitido el desarrollo de las téc- mínimas que soportan las hipótesis de carga consi-
nicas iterativas de optimización. En el campo de la derada — Livesley (4), Moragues (7)—, y la optimi-
programación no lineal, se puede distinguir un zación con geometría variable, siendo variables de
grupo de métodos que no requieren la utilización diseño además de las dimensiones de los elemen-
de las derivadas de las funciones objetivo y/o de tos la propia geometría de la estructura analizada.
restricción, conocido como métodos de búsqueda Esta segunda línea presenta una mayor compleji-
directa (1); y otro, en el que es necesario utilizar las dad, siendo la presentada en primer lugar un sub-
derivadas de las funciones anteriores (3). problema de optimización dentro del problema ge-
aeral de la optimización geométrica; conduciendo
Hemos centrado nuestro estudio en los métodos a mejores soluciones respecto a la optimización es-
del primer grupo, puesto que la función objetivo y tática; Friedland (2), Spiller y Kountouris (14).
© Consejo Superior de Investigaciones Científicas http://informesdelaconstruccion.revistas.csic.es
Licencia Creative Commons 3.0 España (by-nc)
66
Informes de la Construcción, Vol. 37, n.° 372, julio, 1985
2. Objetivos y justificación cambio de estado, salto o movimiento, a la ope-
ración consistente en la variación desde una po-
Realizando un estudio exhaustivo de los métodos sición de diseño dada, a otra técnicamente posi-
de búsqueda directa se puede comprobar que se ble; de esta manera un movimiento se define
basan en razonamientos intuitivos, a menucio de mediante un cambio de coordenadas del punto
gran ingenio, pero, o sin un fundamento matemáti- representativo del estado{s} al{Sj+i}.
co consistente o, por el contrario, en propiedades
de funciones matemáticas «tipo» (funciones uni- El procedimiento se repite un número de ciclos,
modales, cuadráticas, etc.,), y que cuando se apli- hasta que el criterio de convergencia establecido
can a problemas reales concretos pierden la bon- sea satisfecho.
dad y eficiencia que presentaban en la resolución
de problemas teóricos. Puede afirmarse que es
aventurado establecer, y adoptar como fiables, nor- 3.1. Función objetivo y solución base
mas de selección de métodos de optimización en
general, siendo preferible el estudio de las propie- Dentro de los distintos criterios que pueden ser
dades de la función objetivo y restricciones de un adoptados para seleccionar la función objetivo en
problema concreto para así poder darle la respues- un problema de optimización hemos planteado la
ta adecuada. función peso de la estructura, que es la función
más ampliamente propuesta en la literatura espe-
Teniendo en cuenta las consideraciones anteriores, cífica:
surge la necesidad de realizar un análisis de la
esencia íntima de los métodos numéricos de bús-
queda, que permita realizar una ordenación siste- 'AiLi
P= y
mática de los mismos y, lo que es más interesante,
la formulación de un procedimiento original de opti-
mización de gran eficiencia en el diseño geométrico
ó p t i m o de estructuras articuladas, aunque igual- donde, m es el número de barras; y es el peso espe-
mente aplicable a otros tipos de funciones objetivo. cífico del material utilizado en la construcción de la
estructura; A¡ y Lj es el área de la sección transversal
recta y la longitud del elemento i, respectiva-
mente.
3. Método de optimización propuesto
Otra función posible es el coste de ejecución de la
Realizado el análisis de los métodos de búsqueda estructura, en la que además del peso de la misma
directa multidimensionales, se llega a la conclusión entran en juego otros parámetros de distinta natu-
de que un método de optimización «tipo» consta raleza, tales como: dificultad de montaje, coste de
de un número más o menos amplio de etapas o fa- ejecución de los diferentes puntos de enlace entre
ses, cada una de las cuales admite el estudio de un elementos, pérdidas por cartelas, recortes, etc.; pe-
conjunto de factores de índole cualitativa o cuanti- ro que son de difícil evaluación económica exacta,
tativa. La combinación de las distintas etapas con puesto que algunos de los citados dependen de
los factores posibles, nos ha permitido generar de factores, tales como: maquinaria específica de cor-
forma sistemática un gran conjunto de métodos de te de barras, soldadura, organización de montaje,
optimización, la mayoría de ellos inéditos, y su etc., que suelen tener valores muy distintos si se
constatación posterior con funciones objetivo y de trata de pequeñas, medianas o grandes empresas
restricción referidas a estructuras articuladas; como de fabricación y montaje de estructuras metálicas.
resultado de dicho estudio ha surgido el método
que se propone. En cuanto a la solución inicial o solución base del
diseño {SQ}, puede ser establecida a partir de la ex-
El método se estructura en un conjunto de ciclos, periencia obtenida en el análisis de problemas es-
constando cada uno de ellos de dos fases conse- tructurales análogos, o bien, teniendo en cuenta los
cutivas: diseños convencionales; cabe resaltar la importan-
cia que, para un problema de optimización cual-
— Fase primera o de tanteo, en la que se realiza un quiera, represente la elección de la solución inicial
conjunto de operaciones matemáticas y decisio- ya que está comprobada la influencia de la misma,
nes lógicas para obtener información acerca del tanto en la solución final obtenida como en el coste
comportamiento de la función objetivo en posi- asociado a su búsqueda.
ciones más o menos cercanas a una solución
dada.
3.2. Espacio de diseño, variables y restricciones
— Fase segunda, en la que se realiza un movimien-
to conjunto de las variables de diseño, aprove- El espacio de diseño corresponde a un espacio n-
chando la información obtenida en fase anterior, dimensional, E(Xi) de las variables de diseño (i = 1 ,
y siguiendo determinados criterios en la ejecu- 2,..., n). Dichas variables, en el problema planteado,
ción de dicho movimiento. Se entiende por son las correspondientes a las coordenadas de los
© Consejo Superior de Investigaciones Científicas http://informesdelaconstruccion.revistas.csic.es
Licencia Creative Commons 3.0 España (by-nc)
6^
Informes de la Construcción, Vol. 37, n.° 372, julio, 1985
nudos móviles, cuyo campo de existencia viene de- 250 y 400 en el caso de barras traccionadas, tal
finido por sus límites inferior y superior. como indica la NBE-MV-103 (8).
La información correspondiente a las variables de
fiiseño se almacena en una matriz auxiliar de 6 co- Las restricciones de tamaño consideradas co-
lumnas y de tantas filas como variables se hayan rresponden con la práctica habitual de dimen-
definido. En la primera columna se recogen los ín- sionar la estructura agrupando las barras en sub-
dices correspondientes a la identificación de aque- conjuntos que tengan la misma área, con el fin
llos nudos, cuya posición espacial sea modificable, de que no haya un número excesivo de perfiles
esto es, hayan sido seleccionados como variables distintos.
de diseño. La segunda columna contiene informa-
ción sobre la dirección del movimiento, que puede
llevarse a cabo según los ejes X ó Y del plano de la 3.3. Ordenación lógico-matemática del método
estructura, correspondiendo un 1 en caso de hacer- propuesto
lo según la dirección del eje X, y un 2 si se realiza en
la dirección del eje Y. En la tercera columna se Como se ha indicado, el método propuesto consta
identifican los nudos simétricos, si los hay, de los de dos fases:
correspondientes a los situados en la primera co-
lumna en la misma fila. El movimiento relativo en- a) En la primera de ellas se realiza un movimiento
tre dos nudos simétricos se recoge en la cuarta co- exploratorio, cerca de una solución inicial, para
lumna mediante una clave de indentificación, si el obtener información de la función objetivo me-
movimiento es en el mismo sentido le corresponde diante movimientos individuales de la variable
un valor igual a 1, si es en sentido inverso se adopta de diseño. Los factores utilizados en esta etapa
— 1 ; en el caso de que no existan nudos simétricos que han conseguido el método más eficiente,
se toma igual a cero. En las columnas 5 y 6 se alma- son los siguientes:
cenan los límites inferior y superior, respectiva-
mente, de la variable especificada en la primera co- — Magnitud del cambio de estado para las va-
lumna de la misma fila. riables de diseño de carácter aleatorio, com-
prendida entre cero y la luz de la estructura
De las soluciones matemáticas posibles no todas dividida por cincuenta.
son «técnicamente» aceptables; la acotación de las — Adopción de la misma magnitud para todas
soluciones posibles se realiza introduciendo las las variables en la realización del movimien-
restricciones de comportamiento y de tamaño pre- to individuaL
cisas.
— Un movimiento único de cada variable de
El espacio de diseño y las restricciones impuestas diseño.
en el problema de optimización planteado, son — La solución de partida en el movimiento de
las siguientes: una variable es la posición final del cambio
de estado anterior, si se ha obtenido una so-
lución mejorante. El orden de los movimien-
El espacio de diseño posible, E(Xi), es el limitado tos de las variables se realiza según una se-
por el conjunto de puntos comprendidos entre cuencia generada también aleatoriamente.
las barras de los pares y tirantes, de manera que Se trata, en definitiva, de buscar una solución
los nudos de la vertiente permanecen fijos, con mejorante, tomando como inicial la final del
lo que los pares quedan alineados, realizándose movimiento anterior con una magnitud fija,
el montaje del material de cobertura sin dificul- generada aleatoriamente, y según las direc-
tades adicionales. ciones de los ejes del espacio n-dimensional,
{E,}, definido por las variables de diseño
No se permite que los tirantes desciendan por
debajo de la línea que une los apoyos, así se
consigue que la altura útil de la nave no disminu- {Sj} = { S | - i } + X { E j } ; j = 1,2,..., n.
ya; en caso contrario habría que aumentar la lon-
gitud de los pilares para conseguir la misma altu-
ra útil. Cuando no se obtiene mejora de la función
con el valor positivo de X, se realiza otro mo-
Junto a las restricciones de comportamiento an- vimiento exploratorio considerando X nega-
teriores, se ha limitado el movimiento de los nu- tivo.
dos para que no se produzcan cruces entre ba-
rras, por razones constructivas. b) En la segunda fase se realiza un cambio de esta-
do del conjunto de las variables desde la solu-
- Las tensiones de las barras pueden alcanzar un ción final de la etapa anterior { s j , a una nueva
valor máximo igual a la tensión de agotamiento solución {Sk+i} mejorante respecto a la anterior.
del acero empleado, limitándose la esbeltez me- La solución {Sk+i} se obtiene realizando una
cánica de las barras que trabajan a compresión a búsqueda unidireccional, tomando como solu-
© Consejo Superior de Investigaciones Científicas http://informesdelaconstruccion.revistas.csic.es
Licencia Creative Commons 3.0 España (by-nc)
68
Informes de la Construcción, Vol. 37, n° 372, julio, 1985
ción inicial las óptimas individuales de la fase inferior a una cantidad prefijada, no son adecuados
primera: para aplicarlos en nuestro caso, puesto que la fun-
ción objetivo planteada presenta la característica
{sk+11 {Sk}+X*{Dk de tener gran cantidad de valles, con lo que existe
gran probabilidad de que el proceso de cálculo se
donde, X* es la magnitud óptima del movimien- detuviera en un mínimo relativo alejado de la solu-
to, de forma que se obtenga el mínimo de la ción óptima, por lo que proponemos un criterio de
función objetivo según la dirección {Dk}. Entre convergencia basado en el número de ciclos de op-
los distintos métodos de búsqueda unidimen- timización, y según nuestra experiencia en los pro-
sional conocidos que no requieren el uso de blemas analizados, hemos obtenido soluciones sa-
derivadas, proponemos utilizar el de interpola- tisfactorias entre veinticinco y treinta ciclos, cuando
ción cuadrática, ya que hemos comprobado se quiere aumentar la precisión de la solución final
que es el que mejor se adapta a las peculiarida- puede aumentarse el número de ciclos.
des concretas del problema planteado.
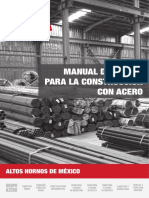
El esquema general del método que se propone se
La dirección {DR} se define por la diferencia entre recoge en el ordinograma siguiente:
los valores de las variables de diseño en sus posi-
ciones final e inicial de la primera fase: FUNCIÓN OBJETIVO Y FUNCIONES DE CONDICIÓN
SOLUCIÓN BASE: {S^}
{Dk} = {Sj}-{So}
NUMERO DE VARIABLES DE DISEÑO: N/
siendo {So} la solución inicial de la fase primera
<5rT7 N DE CICLOS
>
Es importante resaltar que para el problema de op-
PRIMERA FASE
timización estructural esta vía se presenta muy po-
sitiva, puesto que transforma el espacio de diseño I
<^rT7V>
n-dimensional en otro unidimensional, simplifica-
ción que da lugar a una sustancial economía en los I MAGNITUD ALEATORIA DEL MOVIMIENTO:X= ENTRE O Y LUZ/50 |
cálculos. Considérese que la realización de cada {Sj}= {Sj_^} + X{Ej}
movimiento, independientemente de que se reali-
ce modificando una, varias o todas las variables de COMPROBACIÓN DE LOS LIMITES DE LAS VARIABLES
diseño, supone realizar análisis de la estructura pa-
ra distintas hipótesis de carga, obtener los esfuer-
zos de cálculo más desfavorables en las combina- ALMACENAMIENTO DEL
ciones de hipótesis planteadas, procediéndose al VALOR DE LA VARIABLE'
QUE OBTIENE MEJORA
dimensionamiento de las barras y evaluando el va- I
lor de la función objetivo; este procedimiento su-
pone una reducción de t i e m p o considerable en el
proceso general de cálculo.
CALCULO DE LA DIRECCIÓN DE BÚSQUEDA: iO^}= í S •} - { Sj^_.|^}
Con la realización de la primera y segunda etapa se
completa un ciclo de optimización.
Los criterios de convergencia usuales, como pue-
dan ser el que la diferencia entre los valores de las
variables de diseño, y/o la mejora del valor de la
función objetivo entre dos ciclos consecutivos sea C "N )
13
5 7 9 11 12 U 16 18 20 22 yj^
Fig. 1.
Fig. 2. Ttmr-
© Consejo Superior de Investigaciones Científicas http://informesdelaconstruccion.revistas.csic.es
Licencia Creative Commons 3.0 España (by-nc)
69
Informes de la Construcción, Vol. 37, n.° 372, julio, 1985
4. Ejemplos de aplicación de la metodología — Hipótesis 1.^: Acciones constantes* 1.33 +
propuesta + Nieve* 1.5 + Viento* 1.5
— Hipótesis 2.^: Acciones constantes* 1 + Vien-
4.1. Ejemplo 1 to* 1.5
Se trata de optimizar geométricamente la estructu- Las variables de diseño consideradas son las
ra de la figura 1 partiendo de los siguientes datos: coordenadas (X e Y) de los nudos 3, 5, 7, 9, 11 y
12; los simétricos a los anteriores son, respecti-
— La estructura de cubierta pertenece a una nave vamente, los nudos 22, 20, 18, 16 y 14. En este
agroindustrial situada en Córdoba, cuyos ele- caso la matriz auxiliar es de la forma:
mentos de enlace a los pilares respectivos se
considera que son un apoyo fijo y un apoyo
móvil. 3 1 22 0,1 X -X - 0 . 1
3 1
— La luz de la cercha es de 18 m y la altura 2 m. 3 2 22 0. 1 Y *tg<x-0. 1
3
— Situación topográfica normal, tratándose de una 5 1 20 0.1 X -X - 0 . 1
edificación con menos del 33 % de huecos. 5 3
5 2 20 0. 1 Y *tg^-0. 1
— La altura de los pilares y la separación entre pór-
ticos es de 5 m. 7 1 18 0.1 X -X - 0 . 1
9 5
— Se utilizará acero A-42-b; el dimensionamiento 7 2 18 0. 1 Y *tgo^-0. 1
se realizará con una serie de perfiles angulares
9 1 16 0.1 X -X - 0 . 1
simples y dobles, tipificados en la NBE-MV-102 11 7
(9) y escogidos por tener carácter permanente 9 2 16 0. 1 Y *tg^-0.1
en el suministro. Como se ha indicado, las barras 9
se agrupan en pares, tirantes, montantes y diago- 1 1 1 14 0.1 X -X - 0 . 1
nales, dimensionándose cada grupo con el mis-
11 9
1 1 2 14 0.1 Y *tgo<-0.1
mo perfil. 11
12 2 O 0.1 Y *tg^-0.1
Valor de las acciones consideradas: 12
a) Acciones constantes:
Los resultados que se obtienen, tanto para el di-
seño inicial como para el final se recogen en la
Peso propio + peso correa + peso cubier-
tabla 1. Los valores de las lontigudes, esfuerzos
ta = 2 7 kp/m^ en planta.
y tensiones están expresados en cm, kp y k p /
cm^, respectivamente.
b) Acciones variables:
Los valores de las variables de diseño en la solu-
— Sobrecarga de nieve: 40 kp/m^ *cos 12,5° = ción inicial y en la óptima obtenida, se muestran
= 39,1 kp/m^ en planta. en la tabla 2.
— Sobrecarga de viento según la NTE-EC (11): El diseño geométrico óptimo obtenido se pre-
senta en la figura 2.
Hipótesis A: m = 3,25 kp/m^ vertiente,
n = — 13 kp/m^ vertiente.
Hipótesis B: m = — 35 kp/m^ vertiente, 4.2. Ejemplo 2
n = — 51 kp/m^ vertiente.
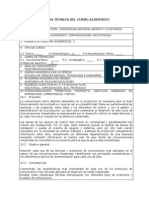
Las hipótesis de partida de la viga de la figura 3, son
Se han planteado dos posibles combinaciones las siguientes:
de hipótesis de carga, mayorándolas con los
coeficientes de ponderación del caso le de la — Pertenece a una nave industrial situada en Cór-
Tabla 2.1 de la NBE-MV-103 (8). doba, de 20 m de luz y 2 m de canto.
. ^. - ' 9 12 14 15 17 21 22 23 25 28 31 31 33 38 38 39 «1
-j—as-
/////¡^ H 12 ía 16 /JfJf/
Fig. 3.
© Consejo Superior de Investigaciones Científicas http://informesdelaconstruccion.revistas.csic.es
Licencia Creative Commons 3.0 España (by-nc)
DO o
, c n t d i r « > Z O O > M O en M 1^ z; > h3 z o S en w ^^ Z > Ix) M h3 en w 'PO > *v
»Í^CA>(jü(jJN3tNj|—'h-' u> K > K ) t O h-• h-^ 4 ^ 4:^ 0 0 0 0 M t O K ) M M 1—' 4^ 4^ 00 00 K ) rvj M M l__i
4^ <jj (jj
rocx)»^ocríi—'--j<jüvx)(ji Ln 0 a^ ho 0 0 4::^ t O 0 0 4 ^ 0 0> K3 on h-• ^ 00 «^ on vr> on h-' ^ 00 h-' fií
(jJ 'X)
!-• ^ (jj O a ^ K ) 0 0 4::^ • ^
1—«l—'tsJtvJtOtvJbOKJI—'h-• I—» h-• 1—• K ) h-» H-• h-» h-' M ^ 1
a^ooototncntvjoooo^ (jü a>io U ) en o O^ (jO o o> 00 on Ul ' • " ^
4 i ^ O O » Í ^ O O i l ^ 0 0 4 i ^ (jJ o^ o (jü o^ o <T> ( j j o o^ 00 0 00 0
3
o
rsj(jü'-jroooK)'->jojK) <jJ ^ o U) ^ o ^ <jj o -J 00 0 -J
a
c h-^ (_i l—l l-_J h - ' ^_l l_i l_i !__. ^_i
1 l - ' t N J K > K > N ) K ) K ) K > N 3 l - ' l__l l_l -J o n •fi^ K ) l _ i V£) V^ h-' K) 4^ U l ^ 2: 0
<^ 00 ^ h-' Ul on H-» - j 0 0 ^£> U l H-
C X > O K > U l O O C X ) U l t O O C X > 4i^ U 1
^ «^ »h -^' h - ' VO ^ U l 4^ Ul
<Tí o ^ Ul on 3
+ cn
ifi»K)(J1h-'OOI—•UlNJiís»' O
^ ^ V£> < ^ VD ^ V£> 0 Ul U l CT> 0 >
^ ^ ^ ^
h-•tNJO4^45^»P^»íi>.OI0f—' O KD
'^ V£) ^ o VD V£) «.o VX> 0 00 ^ M O^ 0 4^ 4^ 0 O^ M - ^ 00
X DI
0
' 1 1 1 1 1 i 1 1 1 1 1 1 1 1 1 I I I 1 1 1 1 1 1 1 1 1 I 1 1 1 1 i 1 1 1 1 1 1 1 l i l i
l_i l_. ^-i M M 1—' h-» h-^ h-• h-' M h-' 'Z D
¡ |__i|__,|__.|_i|_j^_,|_i|__. l-i 00
h-» h-• h - ' to ro h-« M l _ i - J <T» <Tí U l 4 ^ 00 00 lis», on o^ ^ 00 "^ ^ CT* 4 ^ 00 4:^ cr» ^ - j 1 H-
- - J I—» 4 i - 0 0 tO K) 00 4i^ M V£) V£) 00 - J \-*
0 4 ^ 4i* 0 - ^ 00 <^ ^ 3 0
V £ 5 0 K 3 ( j ü > ^ » í ^ ( j ü t v J O < ^
lis. to KO CT\ 4^:^ 4^ cr> vx> rvj 4^
-^ 0 0 kO 0 h - ' IVJ
on U l U l U l on
on
\sO
on
VO
ft^
'sD
00 to M
VD VX) KD
0
"^ 00 00 4ik h-» ^ 4 ^ 4i- M 4i^ 0 0 0 0 D) H-
! 0 0 0 0 O 4 ^ « . D V £ > a i - O C X 5 0 0
0 0 K ) U l VD U ) o U ) VX> ( J l K ) 0 0 h-' K ) 0 0 0 0 4ii. 4^ 4^ 00 K) M 0 l_i l_i 0>, to ^ ISJ ro [ ^ ^
Q^ l_J J_l X U)
4^1—•(jütíS'.'.D'.Drfis.CA)!—«tl::^ 0
-^ h-'
* 9f-
*
(_. M hO M ^H-
1 VD (JJ ro 4i^ 3
1 CX) 00 Ul 00 OJ
CT> X
1 00 (JO
^ >
<Tk U1 Ul o>> hd 00
O r» o tr» 0 K> 0 tSJ
1 l-l
1 1 f 1
tn (Jl 4^ Ul M
f_ii__ij_ii__ii-_ii__ii_ii_i^i_j h-" j _ i l _ , l_l l_l l__l t_J h-" h-^ h - ' h-' l_J l_i ^_. J _ . l _ l 1 - 1 l__l f
CTs 0 0 U l U l U l vo 'sD on Ul on 0 0 CT^ on
,ís*4i!k»ís»^—lCX)CX)'->J»|i>.4^4^ (JO 00 O t v j 45». U 1 tPs» K ) o 00 00
00 cr> 0 4i^ 0 0 4 ^ 0 cr> 0 0 ^ 00
-—»
0
i CX>OV£)4^--4--J»ti^VDOCX>
^ 4 ^ h-» 0 0 ( J l o U l 0 0 h-' 4 ^
^ ^ 3 a
s»-^
o tvj h-' K ) o (jJ K ) <ys (^ 4^ 0 4^ ^ vD o^ -J
(jüiíSk(JlCX)<X>'sO00Ul4:^U> -J tvJ U )
^ -J 4i^ 0 4^
h-» l_j l-i H-" J_J h - ' M M M h-» h-• h-» 2;
1M KJ ^ü h-» h-' 4^ M on <T» 4^ 0 0 t O rvJ 0 0 4^:» CTk on ^ DI
^^•ti*OVD<T>CT400Oifs^4i^ 4 ^ <Ti K ) o 00 u) 00 o ro <T> 4^
^
Ul VX5 0 ^ on v£> VD on ^ 0 »^ Ul 3
+ 0
0 0 4 ^ t 0 0 ^ 4 i ^ O O ( j O O C X ) O • í ^ O^ 0 0 (Jl K) 00 00 (JÜ 4 ^ 0 M 00 ^ 0 1—J h-» h - ' h - ' 0 --J 0 0 tO DJ
0 > ( j O V £ ) ^ ( j O U l O L n 4 s > . 0 ^ 4 i . <T> O U1 00 U) 00 VD "^ a^ 4^ U l tvj o n 0 0 4 ^ Cr» 0 > 4 ^ 0 0 U l bO Ul X i-n
n 11 i I i i i i i 1 1 1 1 1 i 1 1 1 1
~ 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 l
h-• l _ l
i l i
l_J l__l l_-l
z
l_j !__• í_j |_i h-' K> M h-» h - ' tO l_l - - J <T> <T> on on 4 ^ 4 i * U l 0 > ^ ^ 00 •^ ^1 U l <T> 4 ^ 0 0 0 0 4i^ <T> on ^ ^ I h-^
to 4 ^ (T> 0 0 o hJ M 0 0 VX5 ^ VX> h-» 0 0 0 0 4ís- r o 0 !-• 0 <o <y\ a\ 0 0 M t v j ro M 00 o^ <T> '.o 3
- - 4 O O C ^ a ^ u ^ 0 ^ O O - ^
V D O O ( J 1 ( J O ( J O C X ) 0 0 ^ ' - J V O
- J NJ
Ul O en
O
<y\ o INJ 0 0 -J M 0
^
on on U l 0 0 4 ^ U l on on »ti*. 00 on VD ^ on h-' 0 M 0 > 4 ^ 4:^ a\ h-' 0 M on DJ
Ln - - J o U l U l cr> o - j 0 M 4 ^ O^ 4i^ ^ ^ on 0 0 00 M 0 00 0 •ís^ h - ' K ) 0 0 0 0 M h-" 4:^ 0 00 X
CJN-^t^OI—'i4^tí^O<T»<Ti <Ti
^ Ul
íf H-
» *
K) K) ro ^___
K)
h-' 00 on 4^ 3 *
(J1 4:^ 0 00 Í:D
00 -J on 00 X
4^ Ul CT\ ^
O f 4^ 0 K) 0
1 on tr* 1 tr* 1
4^ 1 4^ on 1 I—»
4i^
© Consejo Superior de Investigaciones Científicas http://informesdelaconstruccion.revistas.csic.es
Licencia Creative Commons 3.0 España (by-nc)
71
Informes de la Construcción, Vol. 37, n.» 372, julio, 1985
TABLA 2 Las acciones consideradas han sido las siguientes:
a) Acciones constantes: 30 k p / m l
Varlables Di s e ñ o Diseñe b) Acciones variables: Nieve = 40 kp/m^.
inicial final
En este caso sólo se ha planteado una hipótesis de
150 167.7 combinación de cargas:
3
0 0.0
' 3 Acciones constantes* 1.33 + Nieve* 1.5
i X 300 351.4
: 5 Las variables de diseño son las coordenadas móvi-
Y 0 0.0
5 les de los nudos 4, 5, 8, 9 y 12. Siendo las compo-
i X 450 507.0 nentes de la matriz auxiliar las que se muestran
í 7 seguidamente:
0 16. 3
1 7
X 600 657.0
1 9 4 1 20 0. 1 X -X - 0 . 1
0 18. 7 5 i
4 2 20 0. 1 199.9
1 9
X 750 810.6 5 1 17 —1 0. 1 X -X - 0 . 1
11 8 A
Y 0 34.7 1 5 2 17 0. 1 199. 9
11
Y 0 49. 9 8 1 16 —1 0. 1 X -X - 0 . 1
12 9 5
8 2 16 0- 1 199.9
416.8 9 1 13 "" 1 0. 1 X -X - 0 . 1
Peso 348.8 12 8
9 2 13 0. 1 199.9
12 2 0 0 0. 1 199.9
Los nudos extremos inferiores están enlazados a
los soportes mediante un apoyo fijo y otro Los resultados correspondientes al diseño inicial y
móvil. final se recogen en la tabla 3, pág. siguiente.
Las acciones que se han considerado son las mis-
mas del caso anterior, con excepción de las de Los valores iniciales y finales de las variables de di-
viento, que no se han tenido en cuenta. Se han seño están recogidos en la tabla 4, expresándose
agrupado las distintas barras en pares, tirantes, las coordenadas en cm y el peso en kp.
montantes y diagonales para realizar el dimen-
sionamiento con un número reducido de per- La nueva configuración que se obtiene es la que
files. aparece en la figura 4.
TABLA 4
X Y X Y X Y X Y Y Peso
A 4 5 5 8 8 9 9 12
DI s e ñ o
inicial 200.0 0.0 400.0 0.0 600.0 0.0 800.0 0.0 0.0 637. 1
Di s e ñ o
final 202.8 104. 1 406. 5 46.5 59 5 . 2 82.5 800.4 46.8 76.9 494. 1
31 31 3 6 ^ 38 ^ 3 8
41
Fig. 4. TTfTrF'
© Consejo Superior de Investigaciones Científicas http://informesdelaconstruccion.revistas.csic.es
Licencia Creative Commons 3.0 España (by-nc)
72
Informes de la Construcción, Vol. 37, n.° 372, julio, 1985
TABLA 3
Diseno inicial Diseño final
* *
Barra L(cm) N max N max a max Pfil L(cm) N max N max C7 m a x Pfil
3 - 4255 - 8955
5 - 4255 - 8968
P 11 - 9929 -16804
A 13 - 9929 -16842
R 19 200.0 -11820* 2356 2L 200.0 -19198* 2552 L
E 21 -11820 60-5 -19998 100-8
S 27 - 9929 -16842
29 - 9929 -16804
35 - 4255 - 8968
37 - 4255 - 8995
2 0 227.9 0
T 8 7565 211.7 10368
I 10 7565 192.1 9955
R 16 11347 208.3 15039*
A 18 200.0 11347* 2364 L 201.9 14971 2584 L
N 24 11347 50-5 201.9 14971 60-5
T 26 11347 208.3 15039
E 32 7565 192.1 9955
S 34 7565 211.7 10368
40 0 227.9 0
1 - 4728* 200.0 - 4728
M 6 - 946 96.0 - 946
0 9 0 153.7 - 4687
N 14 - 946 117.6 - 946
T 17 0 153.2 - 4813
A 22 200.0 - 946 2586 L 123.1 - 946 2586 L
N 25 0 60-6 153.2 - 4813 60-6
T 30 - 946 117.6 - 946
E 33 0 153.7 - 4687
S 38 - 946 96.0 - 946
41 - 4728 200.0 - 4728
D 4 6018 224.3 9951*
I 7 - 4681* 219.3 - 1124
A 12 3343 227.9 8199
G 15 - 2006 236.1 2336
0 20 282.4 669 234.9 5160 2558 L
N 23 669 1709 2L 234.9 5160 50-4
A 28 - 2006 60-5 236.1 2336
• L 31 3343 227.9 8199
E 36 - 4681 219.3 - 1124
S 39 6018 224.3 9951
(*) Esfuerzo axil que produce la tensión máxima.
© Consejo Superior de Investigaciones Científicas http://informesdelaconstruccion.revistas.csic.es
Licencia Creative Commons 3.0 España (by-nc)
73_
Informes de la Construcción, Vol. 37, n.° 372, julio, 1985
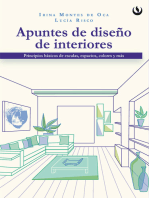
5. Discusión de los resultados obtenidos en las
estructuras optimizadas
La aplicación del método propuesto a dos tipos dis-
tintos de estructuras articuladas, ha permitido ob-
tener configuraciones geométricas óptimas para di-
chas estructuras. Del análisis de los resultados de
los diseños iniciales y finales recogidos en las tablas
1 y 3 cabe resaltar la redistribución de esfuerzos
axiles que se produce en las estructuras optimiza-
das, produciéndose un trabajo más homogeneiza-
N2 CICLOS
do en el conjunto de las barras que componen
las estructuras. Fig. 5.
De la misma forma, puede observarse que se pro- muestra la disminución relativa del peso de las es-
duce una disminución en las longitudes de las ba- tructuras en función del número de ciclos reali-
rras que trabajan a compresión, lo que conlleva a zados.
valores inferiores de las longitudes de pandeo y al
dimensionamiento de las barras con perfiles de Se puede comprobar que en 10 ciclos se obtienen
menor área. disminuciones de peso bastante aproximadas a las
conseguidas en 25 ciclos; de todas formas, por tra-
Por otra parte, los valores de las tensiones máximas tarse de un método en el que los movimientos ex-
en cada grupo de barras dimensionadas con el mis- ploratorios del comportamiento de la función obje-
mo perfil, están muy próximos a los de agotamiento tivo, se producen con magnitudes generadas aleato-
en los diseños óptimos. riamente, conviene realizar los 25 ciclos, para así
poder salir de soluciones aproximadas dado el ca-
En cuanto al número de ciclos que han sido necesa- rácter de gran cantidad de valles que presenta la
rios para obtener los diseños finales, la figura 5 función objetivo en este tipo de problemas.
6. Bibliografía
FLETCHER, R.: «Practical metods of optimization». (2 8. N.B.E. MV-103: «Cálculo de estructuras de acero la-
vol.). John Wüey & Sons. New York, 1981. minado en la edificación». Ministerio de la Vivienda.
FRIEDLAND, L R.: «Geometric structural behavior». Madrid, 1972.
Tesis doctoral. Universidad de Columbia. Nueva 9. N.B.E. MV-102: «Acero laminado para estructuras de
York, 1 9 7 1 . edificación». Ministerio de la Vivienda. Madrid, 1975.
GALLACHER, R. H., y ZIENKIEWICZ, O. C.: « Opti- 10. NELDER, J. A., y MEAD, R.: «A simplex method for
mum structural design. Theory and applications». W i - function minimization». Computer Journal. 7: 308-
ley, Nueva York, 1977. 313, 1965.
LIVESLEY, R. K.: «The automatic design of structural 1 1 . NTE-ECG; «Estructuras-Cargas gravitatorias» M O P U .
frames». Quart J. Mech. Appl. Math, 1956. Madrid, 1976.
5. MAXWELL, J. C.: «On the calculation of the equili- 12. POWELL, M. J. D.: «An efficient method for finding
brium and stiffnes of frames». The scientific papers of the mínimum of a function of several variables wit-
James Clerk Maxwell. Cambridge University Press, hout calculating derivates». Computer Journai 7:
1890. 303-307, 1964.
MITCHELL, A. G.: «The limits of economy of material 13. ROSENBROCK, H. H.: «An automatic method for fin-
in frame-structures». Philosophical magazine. Vol. 8. ding the greatest or least valué of a function». Com-
n.° 47, noviembre, 1904. puter journai 3: 175-184, 1960.
MORAGUES, J. J.: «Diseño óptimo de estructuras 14. SPILLERS, W. R., y KOUNTORIS, G. E.: «Geometric
aporticadas de hormigón armado». Tesis doctoral. ET- optimization using simple code representation». Jour-
SICCP, Valencia, 1980. nal of the structural división. 959-971. Mayo, 1960.
^ i^ ^
© Consejo Superior de Investigaciones Científicas http://informesdelaconstruccion.revistas.csic.es
Licencia Creative Commons 3.0 España (by-nc)
También podría gustarte
- TesisDocumento88 páginasTesisCristian Camilo Quitian Morales0% (1)
- Mamposteria No Reforzada PDFDocumento93 páginasMamposteria No Reforzada PDFCristian Camilo Quitian Morales100% (6)
- OptimizacionAGElitista PDFDocumento10 páginasOptimizacionAGElitista PDFRommel Gomez PerezAún no hay calificaciones
- 04 Patologias en Las EdificacionesDocumento44 páginas04 Patologias en Las EdificacionesNana Koothrappali83% (6)
- Tesis2008 Anabela Gabalec Tiempo de Fraguado Del HormigonDocumento28 páginasTesis2008 Anabela Gabalec Tiempo de Fraguado Del HormigonDavid AlbertoAún no hay calificaciones
- Optimización EstructuralDocumento19 páginasOptimización Estructuralserdelflo100% (1)
- Guia para Analisis Estructural de Edificios de Concreto Armado SAP2000Documento175 páginasGuia para Analisis Estructural de Edificios de Concreto Armado SAP2000Espermatozoide OvuloAún no hay calificaciones
- Excelvbaplication 2010Documento158 páginasExcelvbaplication 2010ferty88Aún no hay calificaciones
- Leccion7 HidratacionCEMENTODocumento41 páginasLeccion7 HidratacionCEMENTO962619857Aún no hay calificaciones
- TESIS22092016 (1) Ficha Nume.5Documento126 páginasTESIS22092016 (1) Ficha Nume.5Estefano XstbAún no hay calificaciones
- Intento 1Documento24 páginasIntento 1Cristian Camilo Quitian MoralesAún no hay calificaciones
- Decreto 945 Del 05 de Junio de 2017-NSR-10 PDFDocumento47 páginasDecreto 945 Del 05 de Junio de 2017-NSR-10 PDFFelipe BatemanAún no hay calificaciones
- Manual Ahmsa 2013-2 PDFDocumento420 páginasManual Ahmsa 2013-2 PDFGiovanni Cambranis MuñozAún no hay calificaciones
- Decreto NSR-10 PDFDocumento4 páginasDecreto NSR-10 PDFsriveragAún no hay calificaciones
- Diseño Estructural PVN Bella-Vista SoachaDocumento48 páginasDiseño Estructural PVN Bella-Vista SoachaXaviier GCAún no hay calificaciones
- Decreto 92 de Enero17-2011Documento3 páginasDecreto 92 de Enero17-2011archer03Aún no hay calificaciones
- Dec 2525 Del 13 de Julio de 2010Documento4 páginasDec 2525 Del 13 de Julio de 2010pedromarranoAún no hay calificaciones
- Decreto 1203 Del 12 de Julio de 2017Documento25 páginasDecreto 1203 Del 12 de Julio de 2017FabiánAndrésGarcíaPinillaAún no hay calificaciones
- NSR-10 Titulo FDocumento600 páginasNSR-10 Titulo FCarlos Andres Aristizabal Moreno83% (6)
- Resolucion 0017 Del 4 de Diciembre de 2017Documento115 páginasResolucion 0017 Del 4 de Diciembre de 2017Enrique LineroAún no hay calificaciones
- Anexo Técnico Reglamentacion Ley Vivineda Segura PDFDocumento37 páginasAnexo Técnico Reglamentacion Ley Vivineda Segura PDFCamilo BetancourtAún no hay calificaciones
- Metodo de GumbelDocumento3 páginasMetodo de GumbelTiendas Bata TacnaAún no hay calificaciones
- Principios y Fundamentos de La Hidrología SuperficialDocumento289 páginasPrincipios y Fundamentos de La Hidrología SuperficialClaudio CrisóstomoAún no hay calificaciones
- Tema Vii-1Documento15 páginasTema Vii-1Selimsito Mumenthey BustamanteAún no hay calificaciones
- PriorizacionDocumento6 páginasPriorizacionJunaglezse93Aún no hay calificaciones
- Capacidad de InfiltracionDocumento8 páginasCapacidad de InfiltracionMaria VillahermosaAún no hay calificaciones
- INFILTRACIONDocumento10 páginasINFILTRACIONJennifertzAún no hay calificaciones
- Manual de Introduccion CuencasDocumento92 páginasManual de Introduccion CuencasGuido VenegasAún no hay calificaciones
- Black Swan Caso ClinicoDocumento8 páginasBlack Swan Caso ClinicoCamila FuenzalidaAún no hay calificaciones
- Modelo Ficha Tecnica de CursoDocumento2 páginasModelo Ficha Tecnica de CursoMarcelita AvilaAún no hay calificaciones
- Mecánica de Fluidos. Flujos Laminar y No LaminarDocumento38 páginasMecánica de Fluidos. Flujos Laminar y No LaminarJocelyn Rivero HernandezAún no hay calificaciones
- Guías de Aprendizaje 33Documento6 páginasGuías de Aprendizaje 33Monica Andrea Pinto NinoAún no hay calificaciones
- Estequiometria de GasesDocumento1 páginaEstequiometria de Gasesmr.wilblackAún no hay calificaciones
- Dialnet El Arte de PiropearDocumento9 páginasDialnet El Arte de PiropearJimmy FloresAún no hay calificaciones
- Informepractica Trabajo GrupalDocumento11 páginasInformepractica Trabajo GrupalMISHEL CAROLINA FRIAS CORELLAAún no hay calificaciones
- Validacion - FisicaDocumento2 páginasValidacion - FisicaNatalia JuradoAún no hay calificaciones
- Mapa Mental - Historia de La CalidadDocumento1 páginaMapa Mental - Historia de La CalidadSARAI LEAL ZUNIGAAún no hay calificaciones
- ACTIVIDAD 4 Diplomado Docencia UniversitariaDocumento2 páginasACTIVIDAD 4 Diplomado Docencia UniversitariaGerardo A. Melo CuzaAún no hay calificaciones
- Matemática 1er GradoDocumento26 páginasMatemática 1er GradoLucia Solana ForteteAún no hay calificaciones
- Infosys Technolologies - Resumen - Dimensiones - SolucionesDocumento6 páginasInfosys Technolologies - Resumen - Dimensiones - SolucionesMiguel Guillermo100% (1)
- 2.2. Plan de Vida y CarreraDocumento18 páginas2.2. Plan de Vida y CarreraFreddy SolísAún no hay calificaciones
- Polinomios2Documento2 páginasPolinomios2sebastian rojasAún no hay calificaciones
- Tema 7.2. Artes y CienciasDocumento51 páginasTema 7.2. Artes y CienciasBeatriz Pañeda MurciaAún no hay calificaciones
- Ondas SísmicasDocumento4 páginasOndas SísmicasJessica NohemiAún no hay calificaciones
- El Comportamiento de Formación de Espuma de Soluciones Acuosas de Ácido OleicoDocumento20 páginasEl Comportamiento de Formación de Espuma de Soluciones Acuosas de Ácido OleicoFelipe Andres Ruminot RamosAún no hay calificaciones
- Evaristo Nugkuag Ikanán - El Desarrollo Indígena Autónomo en La Amazonía Luego de 500 AñosDocumento15 páginasEvaristo Nugkuag Ikanán - El Desarrollo Indígena Autónomo en La Amazonía Luego de 500 AñosIsra Ortz RodAún no hay calificaciones
- Manual Fluke 434Documento24 páginasManual Fluke 434Vladimir Mendoza100% (1)
- El Estado y El DerechoDocumento14 páginasEl Estado y El DerechoHeiBrayan :3Aún no hay calificaciones
- GERENTEPROYECCIONDocumento28 páginasGERENTEPROYECCIONMonitho MaciaAún no hay calificaciones
- Gestion de Administracion TR1 .Documento11 páginasGestion de Administracion TR1 .Pablito Huaman Yachas50% (2)
- Practicas PlasticosDocumento13 páginasPracticas PlasticosBerenice Hernandez AguilarAún no hay calificaciones
- Eje 3 Saber ConocerDocumento21 páginasEje 3 Saber ConocerJohnatan Martinez SolanoAún no hay calificaciones
- Grupo 5 Pukara 1Documento1 páginaGrupo 5 Pukara 1Henrry MariacaAún no hay calificaciones
- Gpo (Sor)Documento7 páginasGpo (Sor)Loren Fernández TejeroAún no hay calificaciones
- PDF Diagramas Saveirogolvoyage 16 Ccra - CompressDocumento16 páginasPDF Diagramas Saveirogolvoyage 16 Ccra - CompressOscar RamirezAún no hay calificaciones
- Informe XML CV de PersonasDocumento3 páginasInforme XML CV de PersonasWilson ZambranoAún no hay calificaciones
- Herramientas de Power PointDocumento67 páginasHerramientas de Power PointGermanAún no hay calificaciones
- Tarea 1.1Documento1 páginaTarea 1.1Hugo DiazAún no hay calificaciones
- La Biblia de las Matemáticas RápidasDe EverandLa Biblia de las Matemáticas RápidasCalificación: 4.5 de 5 estrellas4.5/5 (19)
- Los mágicos números del Doctor Matrix: Conviértete en un maestro de los númerosDe EverandLos mágicos números del Doctor Matrix: Conviértete en un maestro de los númerosCalificación: 5 de 5 estrellas5/5 (2)
- Cálculo integral: Técnicas de integraciónDe EverandCálculo integral: Técnicas de integraciónCalificación: 4 de 5 estrellas4/5 (8)
- Había una vez el átomo: O cómo los científicos imaginan lo invisibleDe EverandHabía una vez el átomo: O cómo los científicos imaginan lo invisibleCalificación: 5 de 5 estrellas5/5 (3)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalDe EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalCalificación: 5 de 5 estrellas5/5 (3)
- La teoría de casi todo: El modelo estándar, triunfo no reconocido de la física modernaDe EverandLa teoría de casi todo: El modelo estándar, triunfo no reconocido de la física modernaCalificación: 4 de 5 estrellas4/5 (32)
- Guía práctica para la refracción ocularDe EverandGuía práctica para la refracción ocularCalificación: 5 de 5 estrellas5/5 (2)
- Mi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaDe EverandMi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaCalificación: 5 de 5 estrellas5/5 (5)
- Mentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraDe EverandMentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraCalificación: 4.5 de 5 estrellas4.5/5 (5)
- Electricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiDe EverandElectricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiCalificación: 3.5 de 5 estrellas3.5/5 (5)
- La magia de los números: 136 recreaciones aritméticas y geométricasDe EverandLa magia de los números: 136 recreaciones aritméticas y geométricasCalificación: 1 de 5 estrellas1/5 (1)
- Apuntes de diseño de interiores: Principios básicos de escalas, espacios, colores y másDe EverandApuntes de diseño de interiores: Principios básicos de escalas, espacios, colores y másCalificación: 4.5 de 5 estrellas4.5/5 (20)
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- El cerebro matemático: Cómo nacen, viven y a veces mueren los números en nuestra menteDe EverandEl cerebro matemático: Cómo nacen, viven y a veces mueren los números en nuestra menteCalificación: 4 de 5 estrellas4/5 (5)
- Matemáticas financieras y evaluación de proyectos: Segunda ediciónDe EverandMatemáticas financieras y evaluación de proyectos: Segunda ediciónAún no hay calificaciones
- La arquitectura moderna en Latinoamérica: Antología de autores, obras y textosDe EverandLa arquitectura moderna en Latinoamérica: Antología de autores, obras y textosAún no hay calificaciones
- El principio de posibilidad: Cómo la física cuántica puede mejorar tu forma de pensar, vivir y amarDe EverandEl principio de posibilidad: Cómo la física cuántica puede mejorar tu forma de pensar, vivir y amarCalificación: 4 de 5 estrellas4/5 (6)
- Sanación por Cristales - La guía definitiva para principiantes: Descubre el poder de los cristales curativos, piedras y minerales para la salud y la felicidadDe EverandSanación por Cristales - La guía definitiva para principiantes: Descubre el poder de los cristales curativos, piedras y minerales para la salud y la felicidadCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Diseño urbano: Teoría y Método. Tercera edición actualizadaDe EverandDiseño urbano: Teoría y Método. Tercera edición actualizadaAún no hay calificaciones










































































![Diseño de Experimentos [Métodos y Aplicaciones]](https://imgv2-1-f.scribdassets.com/img/word_document/436271314/149x198/596c96deb2/1654336147?v=1)







