También podría gustarte
- CajaCambiosScaniaEuro5Documento38 páginasCajaCambiosScaniaEuro5Samuel HerbasAún no hay calificaciones
- Programación en ArduinoDocumento34 páginasProgramación en ArduinoJohn Morillo100% (1)
- John Deere 2530 PDFDocumento165 páginasJohn Deere 2530 PDFMateos Mulka0% (1)
- Informe Programacion Sensor Color ArduinoDocumento6 páginasInforme Programacion Sensor Color ArduinoDaviid RodriguezAún no hay calificaciones
- Control remoto IR, punterolaser, sensorvibraciones, potenciómetro,detectorobstáculosDocumento8 páginasControl remoto IR, punterolaser, sensorvibraciones, potenciómetro,detectorobstáculosmicha2mcAún no hay calificaciones
- Manual de Prácticas de Circuitos Arduino SimuladosDocumento30 páginasManual de Prácticas de Circuitos Arduino Simuladosspinal07Aún no hay calificaciones
- Semaforo ArduinoDocumento6 páginasSemaforo ArduinoJHONAún no hay calificaciones
- EDEL Manual K2 643VF-006 Variador FUJI FRENIC LIFT para Máquinas AsincronasDocumento37 páginasEDEL Manual K2 643VF-006 Variador FUJI FRENIC LIFT para Máquinas AsincronasDsound Clb100% (1)
- PYME. Estrategia para su internacionalizaciónDe EverandPYME. Estrategia para su internacionalizaciónAún no hay calificaciones
- Clase 7. Salidas Digitales, For e IfDocumento12 páginasClase 7. Salidas Digitales, For e IfArmandoSolorzanoAún no hay calificaciones
- Armamento y Tiro PolicialDocumento12 páginasArmamento y Tiro Policialguerrera8523Aún no hay calificaciones
- MECANICA DE BANCO HERRAMIENTASDocumento12 páginasMECANICA DE BANCO HERRAMIENTASLili Lee GiKwang JunJin100% (5)
- Prac 03 MaDocumento12 páginasPrac 03 MaMaro AvilaAún no hay calificaciones
- Prac 02 MaDocumento12 páginasPrac 02 MaMaro AvilaAún no hay calificaciones
- Robot + Bluetooth +infrarrojoDocumento9 páginasRobot + Bluetooth +infrarrojoBlas AdrianAún no hay calificaciones
- Lenguaje Electronico 6° 3°Documento4 páginasLenguaje Electronico 6° 3°Stefani TercerosAún no hay calificaciones
- Arduino 2Documento4 páginasArduino 2Carlos BaideAún no hay calificaciones
- Program, A Display 7 Segmentos CaseroDocumento8 páginasProgram, A Display 7 Segmentos Caserohelmer ruizAún no hay calificaciones
- Codigo para Semaforo en Arduino, Practica 6Documento10 páginasCodigo para Semaforo en Arduino, Practica 6Luis ArrasAún no hay calificaciones
- 3 Proyecto Final Medidas Electricas II SistemasDocumento6 páginas3 Proyecto Final Medidas Electricas II SistemasJoel MonteroAún no hay calificaciones
- M1H 287003 281535 272016Documento31 páginasM1H 287003 281535 272016Matías CorvettoAún no hay calificaciones
- OFIMATICA (Semáforo Con Arduino)Documento13 páginasOFIMATICA (Semáforo Con Arduino)Franco venturaAún no hay calificaciones
- Practica 1 MicrocontroladoresDocumento9 páginasPractica 1 MicrocontroladoresDebbie GonzalesAún no hay calificaciones
- Proyecto ArduinoDocumento7 páginasProyecto ArduinoxursoAún no hay calificaciones
- Proyecto CircuitoDocumento4 páginasProyecto Circuitofernanda sarateAún no hay calificaciones
- Seminario de Arduino Clase 2Documento22 páginasSeminario de Arduino Clase 2Francisco Javier CantoAún no hay calificaciones
- Portafolio Nro 2 - Valeria HoyosDocumento12 páginasPortafolio Nro 2 - Valeria HoyosAlejandro Joaquín Bejarano RomeroAún no hay calificaciones
- Proyecto Javier JimenezDocumento10 páginasProyecto Javier JimenezCrist_sosaAún no hay calificaciones
- Ing Mecatrónica Portafolio Problemas ArduinoDocumento14 páginasIng Mecatrónica Portafolio Problemas ArduinoAlejandro Joaquín Bejarano RomeroAún no hay calificaciones
- Formato para Las Estructuras de Control en Arduino Suma Resta LedDocumento8 páginasFormato para Las Estructuras de Control en Arduino Suma Resta LedCristian TorrijosAún no hay calificaciones
- Juego de Luces Con ArduinoDocumento6 páginasJuego de Luces Con Arduinosamuel ayllon plazaAún no hay calificaciones
- Tarea 2Documento14 páginasTarea 2Mabel Nicol Perez HurtadoAún no hay calificaciones
- InernaderoDocumento6 páginasInernaderoJose Antonio J M-aAún no hay calificaciones
- Álgebra de BooleDocumento29 páginasÁlgebra de BooleCamila caputoAún no hay calificaciones
- Proyecto Dutan ArielDocumento14 páginasProyecto Dutan ArielAriel DutanAún no hay calificaciones
- Codigo Fuente Del VumetroDocumento2 páginasCodigo Fuente Del Vumetrosamuel100% (1)
- Reporte Dado ElectronicoDocumento16 páginasReporte Dado ElectronicoMiguelMartinezMorenoAún no hay calificaciones
- Reto 3Documento2 páginasReto 3victor alejandro montalvo floresAún no hay calificaciones
- LedsDocumento13 páginasLedsal478092Aún no hay calificaciones
- R20 N A4 N T4 N 23 NNN OchonledsnennsecuenciaDocumento4 páginasR20 N A4 N T4 N 23 NNN OchonledsnennsecuenciaNatalia QuirogaAún no hay calificaciones
- Practicas 1 y 2 en ArduinoDocumento5 páginasPracticas 1 y 2 en ArduinoJhon Carlos Alfonso PintoAún no hay calificaciones
- EJEMPLO BÀSICODocumento8 páginasEJEMPLO BÀSICOJosé RomeroAún no hay calificaciones
- Sos SemfaoroDocumento3 páginasSos SemfaoroVALENTINA PATRICIA VENEGAS SOTOAún no hay calificaciones
- Prácticas Arduino: Control de LEDs y medición de luzDocumento27 páginasPrácticas Arduino: Control de LEDs y medición de luzAbbýý SaancheezAún no hay calificaciones
- Codigo de Un Basurero Con Compuertas LogicasDocumento4 páginasCodigo de Un Basurero Con Compuertas Logicassinsinho Dos SantosAún no hay calificaciones
- Proyecto de RecuperacionDocumento4 páginasProyecto de RecuperacionFelix Sebastian ValdiviezoAún no hay calificaciones
- Trabajo de Tec ProgramacionDocumento9 páginasTrabajo de Tec Programacionbritosignacio09Aún no hay calificaciones
- Parcial RoboticaDocumento4 páginasParcial RoboticaByron Josel Buitrago MartínezAún no hay calificaciones
- Ejercicios ARDUINO 2Documento3 páginasEjercicios ARDUINO 2Eduardo NúñezAún no hay calificaciones
- E/S Digital: Pinmode (Pin, Mode)Documento7 páginasE/S Digital: Pinmode (Pin, Mode)banzorro9029Aún no hay calificaciones
- Medición distancia Arduino LCDDocumento10 páginasMedición distancia Arduino LCDGustavo Rodriguez VargasAún no hay calificaciones
- Servo CodigoDocumento6 páginasServo CodigoAlberto MolinaAún no hay calificaciones
- Simon Dice 2 Botones CodigoDocumento9 páginasSimon Dice 2 Botones CodigoIgnacioAún no hay calificaciones
- 0ch0 LedsDocumento3 páginas0ch0 LedsNatalia QuirogaAún no hay calificaciones
- ITSAL Practicas Scratch Sensor UltrasonicoDocumento32 páginasITSAL Practicas Scratch Sensor UltrasonicoCarlos Alfonso Alvarez LopezAún no hay calificaciones
- Prac 01 MaDocumento13 páginasPrac 01 MaMaro AvilaAún no hay calificaciones
- Programa Encendido 3 Leds Con PotenciómetroDocumento2 páginasPrograma Encendido 3 Leds Con PotenciómetroMirian SabroAún no hay calificaciones
- Parcial Circuitos Digitales Corte 2Documento14 páginasParcial Circuitos Digitales Corte 2DavidAún no hay calificaciones
- Proyecto 4Documento8 páginasProyecto 4Gudiel MendezAún no hay calificaciones
- Programas de Arduino Con RGBDocumento17 páginasProgramas de Arduino Con RGBMaria Augusta Peñaherrera CaleAún no hay calificaciones
- Practica2ArduinoNivelTanque3SensoresDocumento6 páginasPractica2ArduinoNivelTanque3SensoresJulian RamosAún no hay calificaciones
- Arduino LED Pulsador SecuenciasDocumento19 páginasArduino LED Pulsador SecuenciasAngel Lucio PomaresAún no hay calificaciones
- Tutorial Del Módulo Sensor de Seguimiento TCRT5000 de 5 VíasDocumento3 páginasTutorial Del Módulo Sensor de Seguimiento TCRT5000 de 5 VíasbordisAún no hay calificaciones
- Práctica - Comunicación Entre ArduinosDocumento4 páginasPráctica - Comunicación Entre ArduinosErnesto Valdez díazAún no hay calificaciones
- Final Editado InversoDocumento2 páginasFinal Editado InversoSolufastit SolufastitAún no hay calificaciones
- Maquinas Electricas Syllabus UTHDocumento4 páginasMaquinas Electricas Syllabus UTHDebbie GonzalesAún no hay calificaciones
- MEE 2111 Maquinas Electricas Jornalizacion III 2020 Grupo 1Documento3 páginasMEE 2111 Maquinas Electricas Jornalizacion III 2020 Grupo 1Debbie GonzalesAún no hay calificaciones
- Boris Ivor Flores Caceres.Documento23 páginasBoris Ivor Flores Caceres.Debbie GonzalesAún no hay calificaciones
- Guia #1 Redes I NAHUNDocumento4 páginasGuia #1 Redes I NAHUNDebbie GonzalesAún no hay calificaciones
- Boris Ivor Flores CaceresDocumento14 páginasBoris Ivor Flores CaceresDebbie GonzalesAún no hay calificaciones
- Redes de Computacion I - Guia #1 sobre conceptos básicosDocumento4 páginasRedes de Computacion I - Guia #1 sobre conceptos básicosDebbie GonzalesAún no hay calificaciones
- Ensayo Boris FloresDocumento4 páginasEnsayo Boris FloresDebbie GonzalesAún no hay calificaciones
- MEE-2111 Guía Laboratorio Práctica 3Documento6 páginasMEE-2111 Guía Laboratorio Práctica 3Debbie GonzalesAún no hay calificaciones
- Investigacion Tipos de CompresoresDocumento3 páginasInvestigacion Tipos de CompresoresDebbie GonzalesAún no hay calificaciones
- Practica 1 MicrocontroladoresDocumento9 páginasPractica 1 MicrocontroladoresDebbie GonzalesAún no hay calificaciones
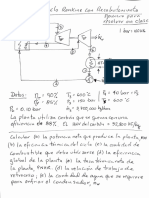
- Ejercicio Rankine Con Recalentamiento - Parte - 1 - 1P2020 PDFDocumento1 páginaEjercicio Rankine Con Recalentamiento - Parte - 1 - 1P2020 PDFDebbie GonzalesAún no hay calificaciones
- Guia #2 Redes IDocumento4 páginasGuia #2 Redes IDebbie GonzalesAún no hay calificaciones
- Ejercicio Rankine Con Recalentamiento - Parte - 3 - 1P2020 PDFDocumento3 páginasEjercicio Rankine Con Recalentamiento - Parte - 3 - 1P2020 PDFDebbie GonzalesAún no hay calificaciones
- Ejercicio Rankine Con Recalentamiento - Parte - 1 - 1P2020Documento1 páginaEjercicio Rankine Con Recalentamiento - Parte - 1 - 1P2020Debbie GonzalesAún no hay calificaciones
- Selecciona estándares y códigos eléctricosDocumento2 páginasSelecciona estándares y códigos eléctricosDebbie GonzalesAún no hay calificaciones
- Ejercicio Rankine Con Recalentamiento - Parte - 3 - 1P2020 PDFDocumento3 páginasEjercicio Rankine Con Recalentamiento - Parte - 3 - 1P2020 PDFDebbie GonzalesAún no hay calificaciones
- Ejercicio Rankine Con Recalentamiento - Parte - 3 - 1P2020 PDFDocumento3 páginasEjercicio Rankine Con Recalentamiento - Parte - 3 - 1P2020 PDFDebbie GonzalesAún no hay calificaciones
- Diseño Electrico Industrial 2020Documento2 páginasDiseño Electrico Industrial 2020Debbie GonzalesAún no hay calificaciones
- Distribucion Industrial 2020Documento1 páginaDistribucion Industrial 2020Debbie GonzalesAún no hay calificaciones
- Distribucion Comercial 2020Documento1 páginaDistribucion Comercial 2020Debbie GonzalesAún no hay calificaciones
- De ComprasDocumento1 páginaDe ComprasDebbie GonzalesAún no hay calificaciones
- De ComprasDocumento1 páginaDe ComprasDebbie GonzalesAún no hay calificaciones
- Informe Tecnico Observaciones SunafilDocumento4 páginasInforme Tecnico Observaciones SunafilEros Andres Hurtado Zuñiga100% (1)
- Almacenamiento Externo de La InformaciónDocumento7 páginasAlmacenamiento Externo de La InformaciónVladimir Espinosa CárdenasAún no hay calificaciones
- USLR XLT Manual - 7 26 13 SPANISH1 PDFDocumento4 páginasUSLR XLT Manual - 7 26 13 SPANISH1 PDFhenryAún no hay calificaciones
- Informe de Estudio Topográfico #06Documento32 páginasInforme de Estudio Topográfico #06Victor Shikara Caro RodriguezAún no hay calificaciones
- Construcciones Prourped Tunja Plano5Documento1 páginaConstrucciones Prourped Tunja Plano5GUILLERMO GOMEZAún no hay calificaciones
- Calculo Del Peso para El Sistema de Agua PotableDocumento8 páginasCalculo Del Peso para El Sistema de Agua PotableHC FredyAún no hay calificaciones
- Pruebas PMDocumento62 páginasPruebas PMGiovanniAndresNavarreteAún no hay calificaciones
- Permiso de trabajo para operaciones de mantenimientoDocumento4 páginasPermiso de trabajo para operaciones de mantenimientoCesar Javier Rivera MartellAún no hay calificaciones
- ElectricidadDocumento11 páginasElectricidadGeri CapomollAún no hay calificaciones
- Tarifas Maquinaria Equipos 22Documento6 páginasTarifas Maquinaria Equipos 22Roci YambayAún no hay calificaciones
- Presupuesto instalaciones sanitarias educación inicialDocumento2 páginasPresupuesto instalaciones sanitarias educación inicialGomv EirlAún no hay calificaciones
- Ventajas y Desv de Los PlottersDocumento4 páginasVentajas y Desv de Los PlottersAriel Avellan AragonAún no hay calificaciones
- Guia Virtual BondDocumento1 páginaGuia Virtual BondkeinerlanzaAún no hay calificaciones
- CatalogobypDocumento85 páginasCatalogobypFersh ValderramashAún no hay calificaciones
- Sensores HerraduraDocumento3 páginasSensores HerraduraEsteban Fuentes Elevator PitchAún no hay calificaciones
- Bascula Sc1Documento40 páginasBascula Sc1xaviAún no hay calificaciones
- Microscopio Casero Física 2 Renzo GonzálezDocumento13 páginasMicroscopio Casero Física 2 Renzo GonzálezRenzo GonzalezAún no hay calificaciones
- Informe 5 ManufacturaDocumento25 páginasInforme 5 ManufacturaYen FisherAún no hay calificaciones
- CARGAS PARAISO CORRECCION DE E% DESGLOZADADocumento34 páginasCARGAS PARAISO CORRECCION DE E% DESGLOZADAeric martinezAún no hay calificaciones
- Schneider Electric - Compact NSX - Esquemas Electricos PDFDocumento10 páginasSchneider Electric - Compact NSX - Esquemas Electricos PDFJunior MartinezAún no hay calificaciones
- instalacion-cabina-desinfeccion-automaticaDocumento1 páginainstalacion-cabina-desinfeccion-automaticaRonald Macas GaonaAún no hay calificaciones
- PR AlturaDocumento2 páginasPR AlturaJohn CiboAún no hay calificaciones
- Hemibloqueos Mas Necrosis SimonDocumento31 páginasHemibloqueos Mas Necrosis SimonSimon Vilchez HuertaAún no hay calificaciones
- E01 - Planta Eléctrica de Tomacorrientes - Almacen Primer NivelDocumento1 páginaE01 - Planta Eléctrica de Tomacorrientes - Almacen Primer NivelJulio Barrios VelezAún no hay calificaciones
- Instructivo Murano Deposito DuwxfDocumento4 páginasInstructivo Murano Deposito Duwxfhoracio rizzutiAún no hay calificaciones