También podría gustarte
- AA2P1 Problemas Erika PulidoDocumento4 páginasAA2P1 Problemas Erika PulidoERIKA PULIDOAún no hay calificaciones
- Ejercicios de Conversión de Bases (Metodos Numericos)Documento1 páginaEjercicios de Conversión de Bases (Metodos Numericos)Rafa Bautista0% (1)
- Interpolación LinealDocumento5 páginasInterpolación Linealmaynenita0% (1)
- 3 Ejemplos de Uso Del ComboboxDocumento10 páginas3 Ejemplos de Uso Del Comboboxazu10100% (1)
- Pensum Ingenieria de Sistemas U DistritalDocumento3 páginasPensum Ingenieria de Sistemas U DistritalAlejandro Medina SerratoAún no hay calificaciones
- Dmdi U2 A2 WirqDocumento11 páginasDmdi U2 A2 WirqAnonymous n0vhYMwHp8Aún no hay calificaciones
- Balanceo de ArbolesDocumento8 páginasBalanceo de ArbolesDeybis Calderon PascualAún no hay calificaciones
- Ventaja MecánicaDocumento2 páginasVentaja MecánicaBryan Calderon100% (1)
- Taller 1 HerraminetasDocumento5 páginasTaller 1 HerraminetasDiego Manrique AponteAún no hay calificaciones
- TP de Tecnicas DigitalesDocumento10 páginasTP de Tecnicas DigitalesCATAN454Aún no hay calificaciones
- Clase 5 Algoritmos de Busqueda y ClasificacionDocumento66 páginasClase 5 Algoritmos de Busqueda y ClasificacionAngelytaAún no hay calificaciones
- Guía 28 Ejercicios Funciones PAUTADocumento7 páginasGuía 28 Ejercicios Funciones PAUTACENCOR PALMA 1Aún no hay calificaciones
- Busquedas InternasDocumento10 páginasBusquedas InternasAlvaro AlejoAún no hay calificaciones
- Ecuaciones ParamétricasDocumento9 páginasEcuaciones ParamétricasFabian Sanchez HernandezAún no hay calificaciones
- Tema 4 Tecnicas de Implementacion de La CPUDocumento122 páginasTema 4 Tecnicas de Implementacion de La CPUPako DominguezAún no hay calificaciones
- Practica 2Documento25 páginasPractica 2DANI MONTOYAAún no hay calificaciones
- Actividad Reconocimiento Unidad 1Documento16 páginasActividad Reconocimiento Unidad 1carlos andres sanchez perdomo100% (1)
- Aplicación de La Teoría de GrafosDocumento4 páginasAplicación de La Teoría de GrafosRoselys Fonseca DiazAún no hay calificaciones
- Tarea 3 ProbaDocumento5 páginasTarea 3 ProbaSimón ZeaAún no hay calificaciones
- Ejemplo Valor EsperadoDocumento5 páginasEjemplo Valor EsperadoAlejandrina De BoutaudAún no hay calificaciones
- Ejercicio de Estructuras de Datos PDFDocumento4 páginasEjercicio de Estructuras de Datos PDFJose AlejandroAún no hay calificaciones
- Tarea 1.2Documento3 páginasTarea 1.2sonomyAún no hay calificaciones
- Unidad 2:: Análisis en Estado Transitorio Y PermanenteDocumento28 páginasUnidad 2:: Análisis en Estado Transitorio Y PermanenteNicolas BotelloAún no hay calificaciones
- Método Del Punto FijoDocumento8 páginasMétodo Del Punto FijoJose Miguel Delgado MaciasAún no hay calificaciones
- Unir Equipos Mac A Un Dominio WindowsDocumento6 páginasUnir Equipos Mac A Un Dominio WindowsSotocinco Soto SotoAún no hay calificaciones
- Taller Modelos PDFDocumento6 páginasTaller Modelos PDFNatalia Arango LargoAún no hay calificaciones
- Quiz Unidad 2Documento7 páginasQuiz Unidad 2Willington ReyAún no hay calificaciones
- Representacion de GrafosDocumento33 páginasRepresentacion de GrafosANDREA CAROLINA GOMEZ CAMELOAún no hay calificaciones
- Resumen Capitulo 1 Fisica y MedicionDocumento5 páginasResumen Capitulo 1 Fisica y MedicionJulian GonzálezAún no hay calificaciones
- Estructura de Seleccion Switch (Clase 6)Documento9 páginasEstructura de Seleccion Switch (Clase 6)Diego SeguroAún no hay calificaciones
- Actividad Evaluativa ElectricidadDocumento5 páginasActividad Evaluativa ElectricidadGabriel QuinteroAún no hay calificaciones
- Parcial I - BD Distribuidas PDFDocumento1 páginaParcial I - BD Distribuidas PDFCamilo SantosAún no hay calificaciones
- Punto FlotanteDocumento3 páginasPunto FlotanteKatherine LunaAún no hay calificaciones
- Tarea 4 Problemas CP 6Documento2 páginasTarea 4 Problemas CP 6kevin sornozaAún no hay calificaciones
- PSO-y-ED-Lopez Nuñez Ramirez RodriguezDocumento13 páginasPSO-y-ED-Lopez Nuñez Ramirez Rodriguezluis angel fernandez hernandezAún no hay calificaciones
- Conceptos Basicos de Identificador y Palabras ReservadasDocumento16 páginasConceptos Basicos de Identificador y Palabras ReservadasCru Bocas del ToroAún no hay calificaciones
- Práctica 1 - Recursi-ÓnDocumento9 páginasPráctica 1 - Recursi-ÓnAngel AberbachAún no hay calificaciones
- 2 Integracion Con Condiciones InicialesDocumento6 páginas2 Integracion Con Condiciones InicialesMiguel VelizAún no hay calificaciones
- Ecaes MatematicasDocumento10 páginasEcaes MatematicasStiven_Julian__3213100% (1)
- Desafios Beneficios de La Practica Arquitectura Empresarial 1Documento22 páginasDesafios Beneficios de La Practica Arquitectura Empresarial 1Oscar Chacaliaza Cornelio0% (1)
- Práctica 1 - Representación Gráfica de DatosDocumento5 páginasPráctica 1 - Representación Gráfica de DatosCésar Sánchez MartínezAún no hay calificaciones
- Prueba Del Capítulo 4 - Attempt ReviewDocumento6 páginasPrueba Del Capítulo 4 - Attempt ReviewdianaAún no hay calificaciones
- PD Introducción A LC Sintaxis y SimbolizaciónDocumento38 páginasPD Introducción A LC Sintaxis y SimbolizaciónRoxana DavalosAún no hay calificaciones
- Libro HanzelDocumento64 páginasLibro HanzeljesusAún no hay calificaciones
- Codigo TrellisDocumento15 páginasCodigo TrellisSILVERACAún no hay calificaciones
- Analisis Matematico III VectoresDocumento15 páginasAnalisis Matematico III VectoresChristianFIAún no hay calificaciones
- Estructuras de Control - CondicionalesDocumento21 páginasEstructuras de Control - CondicionalesAlvaro SuarezAún no hay calificaciones
- Geometría AnalíticaDocumento3 páginasGeometría Analíticaaleisa0970% (1)
- Complementos A1, A2 y Signo-MagnitudDocumento5 páginasComplementos A1, A2 y Signo-MagnitudhyperkrizAún no hay calificaciones
- Laboratorio Diseño de Sistemas LogicosDocumento19 páginasLaboratorio Diseño de Sistemas LogicosOscar SanchezAún no hay calificaciones
- Guia Taller Capitulo VDocumento1 páginaGuia Taller Capitulo VjhondogAún no hay calificaciones
- Informe Sumador RestadorDocumento13 páginasInforme Sumador RestadorArnold Vaca PastorAún no hay calificaciones
- Preinforme Exp2 Fisica de CamposDocumento1 páginaPreinforme Exp2 Fisica de CamposEduardo de la HozAún no hay calificaciones
- Solucion Laboratorio04 LG21028Documento3 páginasSolucion Laboratorio04 LG21028Rata FprotAún no hay calificaciones
- Proyecto MecánicaDocumento4 páginasProyecto MecánicaSmyk Carlos Eduardo GuerraAún no hay calificaciones
- DB2 2021 Laboratorio 3 BD2 Restricciones UNIQUEDocumento9 páginasDB2 2021 Laboratorio 3 BD2 Restricciones UNIQUEewjfAún no hay calificaciones
- Taller Segundo CorteDocumento9 páginasTaller Segundo CorteMarceline Ketim PortaAún no hay calificaciones
- Algoritmo Del BanqueroDocumento10 páginasAlgoritmo Del BanqueroAlan Terrazas0% (1)
- Hash ColisionesDocumento6 páginasHash ColisionesAlexander Eduardo Hernandez RamosAún no hay calificaciones
- Taller ElasticidadDocumento2 páginasTaller ElasticidadWyvern PilotAún no hay calificaciones
- Sistemas de Fase Minima y No Minima - Cristhian Martinez ReyDocumento4 páginasSistemas de Fase Minima y No Minima - Cristhian Martinez ReyWyvern PilotAún no hay calificaciones
- Otro Tipo de Busquedas InternasDocumento6 páginasOtro Tipo de Busquedas InternasWyvern PilotAún no hay calificaciones
- Busqueda InternaDocumento14 páginasBusqueda InternaWyvern PilotAún no hay calificaciones
- Coloración y Particionamiento de GrafosDocumento9 páginasColoración y Particionamiento de GrafosWyvern PilotAún no hay calificaciones
- Representación de GrafosDocumento8 páginasRepresentación de GrafosWyvern PilotAún no hay calificaciones
- Solución de ColisionesDocumento18 páginasSolución de ColisionesWyvern PilotAún no hay calificaciones
- Taller Funciones HashDocumento7 páginasTaller Funciones HashWyvern PilotAún no hay calificaciones
- Taller de HuffmanDocumento13 páginasTaller de HuffmanWyvern PilotAún no hay calificaciones
- Taller Expansiones y ReduccionesDocumento21 páginasTaller Expansiones y ReduccionesWyvern PilotAún no hay calificaciones
- Taller de Otras Busquedas InternasDocumento10 páginasTaller de Otras Busquedas InternasWyvern PilotAún no hay calificaciones
- Manual FTK Imager EspañolDocumento57 páginasManual FTK Imager EspañolJuan SandovalAún no hay calificaciones
- Introducción y Triada CIADocumento30 páginasIntroducción y Triada CIAAlison OrtegaAún no hay calificaciones
- Modulo IDocumento32 páginasModulo IYennyfer ParedesAún no hay calificaciones
- Capítulo 7 Funciones HashDocumento101 páginasCapítulo 7 Funciones HashDante EstradaAún no hay calificaciones
- Tabla HashDocumento11 páginasTabla HashDavid RiascosAún no hay calificaciones
- Clase 06 Hashes y Encriptacion HibridaDocumento5 páginasClase 06 Hashes y Encriptacion HibridaRicardo Sanchez gomezAún no hay calificaciones
- Tema - 3 Adquisicion de Evidencias DigitalesDocumento43 páginasTema - 3 Adquisicion de Evidencias DigitalescenepaAún no hay calificaciones
- Bitcoin Retos y Mitos de Esta Nueva Forma de Ahorro Adolfo ContrerasDocumento22 páginasBitcoin Retos y Mitos de Esta Nueva Forma de Ahorro Adolfo ContrerasDiego RiquelmeAún no hay calificaciones
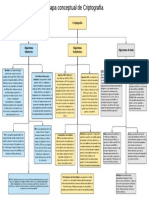
- Mapa Conceptual de CriptografíaDocumento1 páginaMapa Conceptual de CriptografíaAnonymous m1x0oMG50% (2)
- Estructura de Datos 2Documento18 páginasEstructura de Datos 2Gaston M.P.Aún no hay calificaciones
- Essays On Digital Forensics (Español)Documento38 páginasEssays On Digital Forensics (Español)Erick Suarez CanelasAún no hay calificaciones
- Unidad16 Codigof1Documento17 páginasUnidad16 Codigof1tacataAún no hay calificaciones
- Funciones HashDocumento7 páginasFunciones HashChristopher Alexander Nieto MartínezAún no hay calificaciones
- ¿Qué Es Un Árbol Merkle - Hashing y Cómo Funciona La Verificación de BlockchainDocumento6 páginas¿Qué Es Un Árbol Merkle - Hashing y Cómo Funciona La Verificación de BlockchainMarceloMaldonadoArmandAún no hay calificaciones
- Guia 22 Password SessionDocumento11 páginasGuia 22 Password Sessionnobody userAún no hay calificaciones
- Libro RubyDocumento134 páginasLibro RubyJehú Guillén100% (1)
- Base de Datos ComprimidoDocumento281 páginasBase de Datos Comprimidopacosurelio12Aún no hay calificaciones
- Ns2 Nam AodvDocumento18 páginasNs2 Nam AodvPancho LuzónAún no hay calificaciones
- Función HashDocumento15 páginasFunción HashHeberth CórdovaAún no hay calificaciones
- CriptografiaDocumento5 páginasCriptografiaAnthony ChitayAún no hay calificaciones
- Capitulo 5 Esential CiberseguridadDocumento38 páginasCapitulo 5 Esential CiberseguridadNidia Chavarria RoAún no hay calificaciones
- Pid 00228238-4 PDFDocumento108 páginasPid 00228238-4 PDFAlejandro Piñeiro CaroAún no hay calificaciones
- Chapter Slides 14/operating System Concepts EssentialsDocumento56 páginasChapter Slides 14/operating System Concepts EssentialsMARIA JOSE SOLARTE MARTINEZAún no hay calificaciones
- Ensayo Blockchain Alberto de La PavaDocumento9 páginasEnsayo Blockchain Alberto de La PavaAlberto PavaAún no hay calificaciones
- CriptografiaDocumento8 páginasCriptografiaGioberty TineoAún no hay calificaciones
- If 2021 114265868 Apn Ssypc%msgDocumento43 páginasIf 2021 114265868 Apn Ssypc%msgCRIEFOR ZARATEAún no hay calificaciones
- Criptografía: Módulo 2 - Unidad 2Documento25 páginasCriptografía: Módulo 2 - Unidad 2CARLOS MONQUESAún no hay calificaciones
- Tema 5 CriptografiaDocumento35 páginasTema 5 CriptografiaJavier FernandezAún no hay calificaciones
- Auditores Tec Casos Reales de Fraudes Informáticos y Propuesta de SoluciónDocumento8 páginasAuditores Tec Casos Reales de Fraudes Informáticos y Propuesta de SoluciónJuan Manuel RamirezAún no hay calificaciones
- Notas de Seguridad Informatica OfensivaDocumento774 páginasNotas de Seguridad Informatica OfensivaAlex SotomayorAún no hay calificaciones
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDe EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroCalificación: 4 de 5 estrellas4/5 (1)
- LabVIEW: Entorno gráfico de programaciónDe EverandLabVIEW: Entorno gráfico de programaciónCalificación: 4 de 5 estrellas4/5 (4)
- Programación (GRADO SUPERIOR): PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWAREDe EverandProgramación (GRADO SUPERIOR): PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWARECalificación: 4 de 5 estrellas4/5 (2)
- Python Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWAREDe EverandPython Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWARECalificación: 4 de 5 estrellas4/5 (13)
- Controles PLC con Texto Estructurado (ST): IEC 61131-3 y la mejor práctica de programación STDe EverandControles PLC con Texto Estructurado (ST): IEC 61131-3 y la mejor práctica de programación STCalificación: 3 de 5 estrellas3/5 (7)
- Aprender jQuery con 100 ejercicios prácticosDe EverandAprender jQuery con 100 ejercicios prácticosAún no hay calificaciones
- Investigación de operaciones: Conceptos fundamentalesDe EverandInvestigación de operaciones: Conceptos fundamentalesCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosDe EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosCalificación: 5 de 5 estrellas5/5 (5)
- Curso de Programación y Análisis de SoftwareDe EverandCurso de Programación y Análisis de SoftwareCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Análisis y diseño de algoritmos: Un enfoque prácticoDe EverandAnálisis y diseño de algoritmos: Un enfoque prácticoAún no hay calificaciones
- Enciclopedia de Microsoft Visual C#.De EverandEnciclopedia de Microsoft Visual C#.Calificación: 5 de 5 estrellas5/5 (1)
- Introducción al Uso de Formularios (UserForms) en VBADe EverandIntroducción al Uso de Formularios (UserForms) en VBACalificación: 3 de 5 estrellas3/5 (6)
- Programación orientada a objetos en JavaDe EverandProgramación orientada a objetos en JavaCalificación: 4 de 5 estrellas4/5 (1)
- Programación Java - Una Guía para Principiantes para Aprender Java Paso a PasoDe EverandProgramación Java - Una Guía para Principiantes para Aprender Java Paso a PasoCalificación: 3 de 5 estrellas3/5 (7)
- Java 2. Curso de Programación. 4ª EdiciónDe EverandJava 2. Curso de Programación. 4ª EdiciónAún no hay calificaciones
- AngularJS: Conviértete en el profesional que las compañías de software necesitan.De EverandAngularJS: Conviértete en el profesional que las compañías de software necesitan.Calificación: 3.5 de 5 estrellas3.5/5 (3)
- Hacking ético con herramientas Python: SEGURIDAD INFORMÁTICADe EverandHacking ético con herramientas Python: SEGURIDAD INFORMÁTICACalificación: 4.5 de 5 estrellas4.5/5 (10)
- Python Aplicaciones prácticasDe EverandPython Aplicaciones prácticasCalificación: 4 de 5 estrellas4/5 (18)
- JavaScript Una Guía de Aprendizaje para el Lenguaje de Programación JavaScriptDe EverandJavaScript Una Guía de Aprendizaje para el Lenguaje de Programación JavaScriptCalificación: 3 de 5 estrellas3/5 (5)
- Arduino para PrincipiantesDe EverandArduino para PrincipiantesCalificación: 3.5 de 5 estrellas3.5/5 (21)
- Aprende a Programar en C++De EverandAprende a Programar en C++Calificación: 4.5 de 5 estrellas4.5/5 (10)