También podría gustarte
- Somar Manual SCT 1040-1050Documento8 páginasSomar Manual SCT 1040-1050ramiro alvarez100% (1)
- Diagrama Electronico CM-TRIACDocumento5 páginasDiagrama Electronico CM-TRIACEduardo Lara100% (2)
- BGH BL3211D Chassis MSD309 Ver.1Documento29 páginasBGH BL3211D Chassis MSD309 Ver.1Daniel Zorrilla100% (1)
- Diseño Electrico Tienda D1 El Bosque-ELÉCTRICODocumento1 páginaDiseño Electrico Tienda D1 El Bosque-ELÉCTRICOAndres Fernando Canizales CastilloAún no hay calificaciones
- Tarea 02 SolDocumento14 páginasTarea 02 SolSusana RebellónAún no hay calificaciones
- Sistemas de Carga y ArranqueDocumento9 páginasSistemas de Carga y Arranqueaeromexpower200950% (4)
- BGH Ble4211d Chassis Msd309 Ver.1.0Documento38 páginasBGH Ble4211d Chassis Msd309 Ver.1.0AntonioAún no hay calificaciones
- Fallos TransistoresDocumento6 páginasFallos TransistoresTatiana TpAún no hay calificaciones
- Diagrama de Conexion 64174Documento1 páginaDiagrama de Conexion 64174Juan Arriaza0% (1)
- PSR530Documento1 páginaPSR530StellosomaAún no hay calificaciones
- Asus A8n A8dDocumento57 páginasAsus A8n A8dWilfredoAún no hay calificaciones
- Transporter-10 Dual TR-0313-03Documento17 páginasTransporter-10 Dual TR-0313-03LorenzoAún no hay calificaciones
- FSX 2682097NRDocumento1 páginaFSX 2682097NRSalud y Cuidado Automotriz100% (1)
- Paraguay 4 RodasDocumento29 páginasParaguay 4 RodasRaúl MartínezAún no hay calificaciones
- Preparatorio 6Documento7 páginasPreparatorio 6Rodrigo LojanAún no hay calificaciones
- Practica 4Documento9 páginasPractica 4JESUS EDUARDO MEZA MENDIVILAún no hay calificaciones
- Control Motor MCU - Liz OzorioDocumento1 páginaControl Motor MCU - Liz OzorioLiz N Ozorio SilveraAún no hay calificaciones
- TP 148773 05 000 Rev.02Documento1 páginaTP 148773 05 000 Rev.02wilber chiclla jaraAún no hay calificaciones
- Gu A Practica 2Documento8 páginasGu A Practica 2Luis Ibarguen MosqueraAún no hay calificaciones
- Actividad 32 Practica 5 P3Documento8 páginasActividad 32 Practica 5 P3Julio LópezAún no hay calificaciones
- Despiece Motor Keeway RKV EspañolDocumento25 páginasDespiece Motor Keeway RKV EspañolCarlos G100% (1)
- Ele 005 Az ADocumento1 páginaEle 005 Az AKevin Santos MtzAún no hay calificaciones
- Esquema PGM2TNPDDocumento4 páginasEsquema PGM2TNPDsergio anguera cabezueloAún no hay calificaciones
- Gigabyte Ga-6veml - Rev 1.0Documento26 páginasGigabyte Ga-6veml - Rev 1.0Victor AlvarezAún no hay calificaciones
- Practica 03Documento7 páginasPractica 03Juan Chaug SánchezAún no hay calificaciones
- 73L DI Turbo Diesel - 2002 - Complete Wiring - 001-200Documento200 páginas73L DI Turbo Diesel - 2002 - Complete Wiring - 001-200Martín SalvatoreAún no hay calificaciones
- Plano Secadero 4 Girardota V1.3 PDFDocumento19 páginasPlano Secadero 4 Girardota V1.3 PDFDavid Esteban VahosAún no hay calificaciones
- Fulibattery FTDocumento1 páginaFulibattery FTSegundo NúñezAún no hay calificaciones
- CT 383 - SCT 1015-1025 Rev. 1 10-11Documento12 páginasCT 383 - SCT 1015-1025 Rev. 1 10-11jonatas alves conceicao100% (1)
- Celda de Distribución N1Documento4 páginasCelda de Distribución N1jazminAún no hay calificaciones
- 01-Tabla de Aplicación 2009Documento29 páginas01-Tabla de Aplicación 2009Franco ValtortaAún no hay calificaciones
- Celda Sincronismo N2Documento3 páginasCelda Sincronismo N2jazminAún no hay calificaciones
- Proyecto Efesrt Avance 2.0 PDFDocumento6 páginasProyecto Efesrt Avance 2.0 PDFBrayan IBAún no hay calificaciones
- MCD200Documento10 páginasMCD200Yusef Nome C.Aún no hay calificaciones
- Control de Potencia Con PICDocumento5 páginasControl de Potencia Con PICMiguel Rayme100% (1)
- Informe Conversor ADC0808Documento4 páginasInforme Conversor ADC0808KEVIN ANDRES LEON TARAPUESAún no hay calificaciones
- Cabeza Tsuru 8valbDocumento1 páginaCabeza Tsuru 8valbiuliou leal100% (1)
- FSX 0262010 PDFDocumento1 páginaFSX 0262010 PDFSiul SerolfAún no hay calificaciones
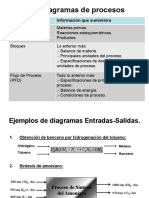
- Tipos de Diagramas de Procesos: Tipo de Diagrama Información Que SuministraDocumento20 páginasTipos de Diagramas de Procesos: Tipo de Diagrama Información Que Suministrafrida silvaAún no hay calificaciones
- 1 Ford EcosportDocumento1 página1 Ford EcosportRAGB1989Aún no hay calificaciones
- PRACTICA 8 OPAMP Rectificador PresicionDocumento4 páginasPRACTICA 8 OPAMP Rectificador PresicionJaime GarciaAún no hay calificaciones
- Tabc866 Tablero Ilum Cuarto de Lavado Pat Dia 220V-8-17Documento10 páginasTabc866 Tablero Ilum Cuarto de Lavado Pat Dia 220V-8-17Heymar ancisar Murcia fuentesAún no hay calificaciones
- ATEGO 2426 Esquema de Circuitos Eléctricos Tacógrafo (TCO)Documento5 páginasATEGO 2426 Esquema de Circuitos Eléctricos Tacógrafo (TCO)YOLANDAAún no hay calificaciones
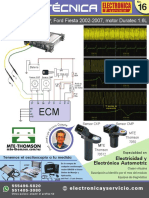
- Ficha EySer No. 16Documento1 páginaFicha EySer No. 16Felipe FarfanAún no hay calificaciones
- Ficha EySer No. 16Documento1 páginaFicha EySer No. 16JavierAún no hay calificaciones
- Ficha EySer No. 16Documento1 páginaFicha EySer No. 16Felipe FarfanAún no hay calificaciones
- Informe 5Documento8 páginasInforme 5Katty EPAún no hay calificaciones
- Circuito Electrico Eps HyundaiDocumento1 páginaCircuito Electrico Eps HyundaiAngel RodríguezAún no hay calificaciones
- Circuito Electrico Eps HyundaiDocumento1 páginaCircuito Electrico Eps HyundaiRaul Garcia GuevaraAún no hay calificaciones
- Circuito Electrico Eps Hyundai PDFDocumento1 páginaCircuito Electrico Eps Hyundai PDFRaul Garcia Guevara100% (1)
- Final Subestacion 3Documento1 páginaFinal Subestacion 3Alexander ArguetaAún no hay calificaciones
- Cerradura ElectricaDocumento4 páginasCerradura ElectricaMiguel AngelAún no hay calificaciones
- Analisis de Atari Con Analizador LogicoDocumento9 páginasAnalisis de Atari Con Analizador LogicoCarit018Aún no hay calificaciones
- Inte Palmadas 21Documento1 páginaInte Palmadas 21JaimeAún no hay calificaciones
- FSX 3082065Documento1 páginaFSX 3082065JAIRO GALINDOAún no hay calificaciones
- Catalogo de Precios Vega PDFDocumento12 páginasCatalogo de Precios Vega PDFoscar de sousaAún no hay calificaciones
- Bombas Multietapas VerticalesDocumento2 páginasBombas Multietapas VerticalesImport DepotAún no hay calificaciones
- TAPASDocumento1 páginaTAPASAndres PeredaAún no hay calificaciones
- PMJ I 7741 40 2214 D001 - 1 PDFDocumento500 páginasPMJ I 7741 40 2214 D001 - 1 PDFRobert LiraAún no hay calificaciones
- Diagrama Conexion de Servidores Fisicos y Virtuales Cucm Uccx Wfo 2022Documento1 páginaDiagrama Conexion de Servidores Fisicos y Virtuales Cucm Uccx Wfo 2022Yeffrey Garban MárquezAún no hay calificaciones
- Lab - 02 TDMDocumento3 páginasLab - 02 TDMhotoc65677Aún no hay calificaciones
- Elo312 0208 Lab02Documento7 páginasElo312 0208 Lab02Susana RebellónAún no hay calificaciones
- Tarea 04Documento2 páginasTarea 04Susana RebellónAún no hay calificaciones
- Quizz 01 SolDocumento2 páginasQuizz 01 SolSusana RebellónAún no hay calificaciones
- Cert 01 SolDocumento4 páginasCert 01 SolSusana RebellónAún no hay calificaciones
- 1426541501540-Guía 5 Principiantes IDocumento1 página1426541501540-Guía 5 Principiantes ISusana RebellónAún no hay calificaciones
- Como Elegir Un Cable para ProyectoDocumento2 páginasComo Elegir Un Cable para ProyectoManuel Alejandro Erices BravoAún no hay calificaciones
- Constante de Un CapacitorDocumento7 páginasConstante de Un CapacitorLilian Velázquez BarreraAún no hay calificaciones
- Qué Es El Sensor MAPDocumento3 páginasQué Es El Sensor MAPMiguel AzuajeAún no hay calificaciones
- Memorias SENIE09 MetodologíaDiseñoSEDocumento10 páginasMemorias SENIE09 MetodologíaDiseñoSESergio Emilio Aguilar FerraezAún no hay calificaciones
- Convertidores DC DCDocumento58 páginasConvertidores DC DCluis angel peña gómezAún no hay calificaciones
- Detector Acustico Rotura de Vidirio DG-457 PDFDocumento2 páginasDetector Acustico Rotura de Vidirio DG-457 PDFJully Milena TurcaAún no hay calificaciones
- Has PracicaDocumento9 páginasHas PracicaMiguel Gomez MartinezAún no hay calificaciones
- Trabajo Practico Prevencion ElectricidadDocumento5 páginasTrabajo Practico Prevencion ElectricidadNicolas Gonzalez Acosta100% (1)
- 004-La Electricidad Puede Ser Un Enemigo MortalDocumento1 página004-La Electricidad Puede Ser Un Enemigo MortalNabtauro Bernaola TorresAún no hay calificaciones
- Ejercicios de Repaso Leyes de Ohm, Watt y JouleDocumento8 páginasEjercicios de Repaso Leyes de Ohm, Watt y JouleDANILO PARRA SANCHEZAún no hay calificaciones
- 5 Regla de OroDocumento7 páginas5 Regla de OroRoger CalizayaAún no hay calificaciones
- iZAJE CRÍTICODocumento3 páginasiZAJE CRÍTICOjose garridoAún no hay calificaciones
- Semana 1 El Circuito Simple en Ac 2015-20Documento23 páginasSemana 1 El Circuito Simple en Ac 2015-20Edgar Verano Gonzales100% (1)
- Banco de CondensadoresDocumento7 páginasBanco de CondensadoresKarla CastilloAún no hay calificaciones
- Guia de Laboratorio No. 07 - Transistor BJTDocumento3 páginasGuia de Laboratorio No. 07 - Transistor BJTryonjaner0Aún no hay calificaciones
- Circuito Dimmer para CautínDocumento12 páginasCircuito Dimmer para CautínJoan PalmarAún no hay calificaciones
- Transformador Doble SecundarioDocumento4 páginasTransformador Doble Secundarioadriyvero100% (1)
- Kva - Instalaciones ElectricasDocumento1 páginaKva - Instalaciones ElectricasDaniel SevillaAún no hay calificaciones
- Diagnóstico Paso A Paso Estator DRSXDocumento9 páginasDiagnóstico Paso A Paso Estator DRSXCamilo Alejandro García EspinosaAún no hay calificaciones
- Ficha Tecnica Reconectador ChardonDocumento2 páginasFicha Tecnica Reconectador ChardonAndres BaqueroAún no hay calificaciones
- Protecciones Eléctricas en Baja TensiónDocumento8 páginasProtecciones Eléctricas en Baja TensiónLuis Felipe Giraldo SandovalAún no hay calificaciones
- Limpiador Por Ultrasonido: OntajeDocumento2 páginasLimpiador Por Ultrasonido: OntajeadriyveroAún no hay calificaciones
- Arduino Mega 2560: Semana 2 (Sesión 3)Documento20 páginasArduino Mega 2560: Semana 2 (Sesión 3)Eliseo Ccanto De La CruzAún no hay calificaciones
- Laboratorio #1 Circuitos Enclavadores y Dobladores - UTPDocumento7 páginasLaboratorio #1 Circuitos Enclavadores y Dobladores - UTPHugoAún no hay calificaciones
- Ejercicios de Potencia TrifasicaDocumento45 páginasEjercicios de Potencia Trifasicafranco_2010Aún no hay calificaciones
- Energía Renovable-GarbitekDocumento129 páginasEnergía Renovable-GarbitekDario SalinasAún no hay calificaciones
- Condensadorers Ac FloydDocumento3 páginasCondensadorers Ac FloydrigaboAún no hay calificaciones
- Informe Final Maquina AsincronaDocumento12 páginasInforme Final Maquina AsincronaJosé Luis García CubasAún no hay calificaciones
- Instalaciones ElectricasDocumento2 páginasInstalaciones ElectricasJose Alfredo LeonesAún no hay calificaciones