También podría gustarte
- Programacion EnteraDocumento14 páginasProgramacion EnteraWilliamMorles100% (1)
- Busqueda Dispersa Aplicada Al Problema de Ruteo de Vehículos Con Colecta y Entrega SimultaneaDocumento10 páginasBusqueda Dispersa Aplicada Al Problema de Ruteo de Vehículos Con Colecta y Entrega SimultaneaErnestoAún no hay calificaciones
- Métodos Heurísticos2Documento24 páginasMétodos Heurísticos2Angel RamosAún no hay calificaciones
- Geometric modeling in computer: Aided geometric designDe EverandGeometric modeling in computer: Aided geometric designAún no hay calificaciones
- 2.3 Algortimos MetaheuristicosDocumento22 páginas2.3 Algortimos MetaheuristicosANGELICA ALEXANDRA JARAMILLO SANDOVALAún no hay calificaciones
- Optimización de RedesDocumento14 páginasOptimización de RedesSergio Yahir VillegasAún no hay calificaciones
- Álgebra abstracta aplicada en ingeniería: casos de aplicación en sistemas difusos tipo 1 y tipo 2De EverandÁlgebra abstracta aplicada en ingeniería: casos de aplicación en sistemas difusos tipo 1 y tipo 2Aún no hay calificaciones
- Definición Del Problema de TransporteDocumento21 páginasDefinición Del Problema de TransporteJesús Fermín Amores GarcíaAún no hay calificaciones
- 3.4 Metodos Automatizados Corelap Aldep y CraftDocumento5 páginas3.4 Metodos Automatizados Corelap Aldep y CraftSaúl ChávezAún no hay calificaciones
- 187 - Un Algoritmo de Busqueda Tabu para Resolver El ProblemDocumento14 páginas187 - Un Algoritmo de Busqueda Tabu para Resolver El ProblemDaniel GenteAún no hay calificaciones
- Introduccion OPF Operación y Planificación de La GeneraciónDocumento6 páginasIntroduccion OPF Operación y Planificación de La GeneraciónJuan Parra AsteteAún no hay calificaciones
- Asignacion CuadraticaDocumento15 páginasAsignacion CuadraticaSergio Adrian Garcia Hernandez100% (2)
- 971 1233 1 PBDocumento14 páginas971 1233 1 PBArias Hidalgo BeMol DanielAún no hay calificaciones
- IQ 10 02 - Clase2022-06-14Documento4 páginasIQ 10 02 - Clase2022-06-14Adolfo LazoAún no hay calificaciones
- Trabajo de Historia de La Programación LinealDocumento7 páginasTrabajo de Historia de La Programación LinealJuan Carlos Miranda CastañónAún no hay calificaciones
- RamificacionDocumento2 páginasRamificacionnicols dayanna charry cruzAún no hay calificaciones
- Problema Vendedor ViajeroDocumento6 páginasProblema Vendedor ViajeroFel IpeAún no hay calificaciones
- Problema Del Agente ViajeroDocumento9 páginasProblema Del Agente ViajeroLuis NavarroAún no hay calificaciones
- Algoritmo Fuerza BrutaDocumento7 páginasAlgoritmo Fuerza BrutaRodrigo AlonzoAún no hay calificaciones
- Métodos para Solución de Problemas Con Algoritmos.Documento7 páginasMétodos para Solución de Problemas Con Algoritmos.Erick UscangaAún no hay calificaciones
- MÉTODO DE ANÁLISIS DE MEDIOS Y METAS y de REDUCCIÓN DE PROBLEMASDocumento5 páginasMÉTODO DE ANÁLISIS DE MEDIOS Y METAS y de REDUCCIÓN DE PROBLEMASvidrioyplomoAún no hay calificaciones
- GRASPDocumento7 páginasGRASPALFREDO ABADAún no hay calificaciones
- Metodo IterativoDocumento3 páginasMetodo IterativoYazmin MejiaAún no hay calificaciones
- Algoritmos VoracesDocumento42 páginasAlgoritmos VoracesCESARPINEDAAún no hay calificaciones
- Programación de Proyectos Con Recursos Limitados PDFDocumento28 páginasProgramación de Proyectos Con Recursos Limitados PDFEmanuel D. NiñoAún no hay calificaciones
- Investigación sobre técnicas heurísticas y metaheurísticasDocumento31 páginasInvestigación sobre técnicas heurísticas y metaheurísticasCristian Alexander LenizAún no hay calificaciones
- MétodosSoluciónPLDocumento5 páginasMétodosSoluciónPLEl Chulo ManuelAún no hay calificaciones
- Un Método Metaheurístico para Resolver El Problema de InstalacionesDocumento13 páginasUn Método Metaheurístico para Resolver El Problema de InstalacionesYerika MachadoAún no hay calificaciones
- Investigacion de OpDocumento13 páginasInvestigacion de OpAngel VazquezAún no hay calificaciones
- Investigación Método de Ramificación y AcotaciónDocumento5 páginasInvestigación Método de Ramificación y Acotaciónjairavigom18Aún no hay calificaciones
- 6sexto Material de Apoyo - Tecnica de Diseño de AlgoritmoDocumento6 páginas6sexto Material de Apoyo - Tecnica de Diseño de AlgoritmoAngel M AguileraAún no hay calificaciones
- Ensayo Literario Programacion LinealDocumento7 páginasEnsayo Literario Programacion LinealFabiola RondonAún no hay calificaciones
- Dialnet UnMetodoDeGeneracionAleatoriaDePesosEnterosOrdenad 7145331Documento29 páginasDialnet UnMetodoDeGeneracionAleatoriaDePesosEnterosOrdenad 7145331Paulette GuerreroAún no hay calificaciones
- ESTRUCTURA de DATOS - Unidad 3 Estrategias de SolucionesDocumento132 páginasESTRUCTURA de DATOS - Unidad 3 Estrategias de SolucionesKevin DavidAún no hay calificaciones
- Path Relinking SpanishDocumento8 páginasPath Relinking SpanishGabriel OspinaAún no hay calificaciones
- Diferentes Tipos de Modelos MatemáticosDocumento8 páginasDiferentes Tipos de Modelos MatemáticosLeiviElivelHernandezOchoaAún no hay calificaciones
- BacktrackingDocumento10 páginasBacktrackingRafa SocaciuAún no hay calificaciones
- Agente ViajeroDocumento38 páginasAgente ViajeroleydiangelinoAún no hay calificaciones
- Contenido. Estratregias y Algoritmo de Busqueda Definición Estrategias de BúsquedaDocumento10 páginasContenido. Estratregias y Algoritmo de Busqueda Definición Estrategias de BúsquedaMilton OtavoAún no hay calificaciones
- Actividad 1 Inv DocumentalDocumento11 páginasActividad 1 Inv DocumentalOMAR SANCHEZ GUEVARAAún no hay calificaciones
- La Programación Lineal Es Un Procedimiento o Algoritmo Matemático Mediante El Cual Se Resuelve Un Problema IndeterminadoDocumento12 páginasLa Programación Lineal Es Un Procedimiento o Algoritmo Matemático Mediante El Cual Se Resuelve Un Problema IndeterminadoVictor Francisco Morales PerezAún no hay calificaciones
- Metaheurísticas para optimización combinatoriaDocumento2 páginasMetaheurísticas para optimización combinatoriaEdinson CastroAún no hay calificaciones
- Programación LinealDocumento6 páginasProgramación LinealBladimir Gustavo Velasco RiosAún no hay calificaciones
- Unidad 3 INVESTIGACION DE OPERACIONESDocumento10 páginasUnidad 3 INVESTIGACION DE OPERACIONESJerzain CarrilloAún no hay calificaciones
- Modelo de TransportaciónDocumento11 páginasModelo de TransportaciónMiguel Angel Berihuete ReyesAún no hay calificaciones
- Actividad 1 Inv DocumentalDocumento21 páginasActividad 1 Inv DocumentalOMAR SANCHEZ GUEVARAAún no hay calificaciones
- Modelos MatematicosDocumento4 páginasModelos MatematicosRamses MapulaAún no hay calificaciones
- Valle PerdidoDocumento6 páginasValle Perdidomanuel abarcaAún no hay calificaciones
- Heuristica y Metaheuristica Aplicadas en Logistica y ProducciònDocumento22 páginasHeuristica y Metaheuristica Aplicadas en Logistica y ProducciònCesar Augusto Rovira CabezasAún no hay calificaciones
- Reconocimiento Jhonatan Vega 102016 84Documento13 páginasReconocimiento Jhonatan Vega 102016 84Vega JonatanAún no hay calificaciones
- A Programación LinealDocumento5 páginasA Programación LinealJoel PerezAún no hay calificaciones
- Métodos de LayoutsDocumento33 páginasMétodos de LayoutsMiryamMartelEugenioAún no hay calificaciones
- Transporte y AsignaciónDocumento34 páginasTransporte y AsignaciónBeltran H Blade100% (1)
- Programación LinealDocumento6 páginasProgramación LinealJohan Andres Galeano GalvizAún no hay calificaciones
- Software de Cómputo NuméricoDocumento3 páginasSoftware de Cómputo NuméricoRedes Computadores Sena TunjaAún no hay calificaciones
- Algoritmo de Ramificación y AcotaciónDocumento6 páginasAlgoritmo de Ramificación y AcotaciónCarlos Moises Espino RodríguezAún no hay calificaciones
- 1 4-OperacionesVectoresDocumento489 páginas1 4-OperacionesVectoresAlan G. Cano CaballeroAún no hay calificaciones
- Unidad 3. Control de AccesoDocumento11 páginasUnidad 3. Control de AccesoAlan G. Cano CaballeroAún no hay calificaciones
- ExemploPractico UIVDocumento4 páginasExemploPractico UIVAlan G. Cano CaballeroAún no hay calificaciones
- Guia Practica para El Usuario 2013 UsersDocumento324 páginasGuia Practica para El Usuario 2013 UsersJuan Antonio Gómez AguilarAún no hay calificaciones
- Matematicas 5 Ecuaciones Diferenciales Joel Ibarra EscutiaDocumento304 páginasMatematicas 5 Ecuaciones Diferenciales Joel Ibarra EscutiaVanee Saavedra68% (19)
- Matematicas 5 Ecuaciones Diferenciales Joel Ibarra Escutia PDFDocumento304 páginasMatematicas 5 Ecuaciones Diferenciales Joel Ibarra Escutia PDFAlan G. Cano Caballero100% (1)
- Punto Fijo METODOS NUMERICOSDocumento3 páginasPunto Fijo METODOS NUMERICOSOscarAún no hay calificaciones
- Aplicación de la matriz jacobiana y cálculo de eigenvaloresDocumento7 páginasAplicación de la matriz jacobiana y cálculo de eigenvaloresCesar Yanes MartinezAún no hay calificaciones
- Ejercicios de Ejemplo SeudocodigoDocumento5 páginasEjercicios de Ejemplo Seudocodigoale yhadiraAún no hay calificaciones
- Algedra Semana 03 IIDocumento6 páginasAlgedra Semana 03 IIHaydid Tito ValdezAún no hay calificaciones
- Segundo TrabajoDocumento14 páginasSegundo TrabajoLORENA JAZMIN PANDO ESPINOZAAún no hay calificaciones
- Ajusted e Curva SDocumento25 páginasAjusted e Curva SYramLAún no hay calificaciones
- Algeb 1bim 5to SecDocumento20 páginasAlgeb 1bim 5to SecMarito del Peru100% (1)
- Presentación SimplexDocumento21 páginasPresentación SimplexSaul ErazoAún no hay calificaciones
- Problemas de álgebra polinomialDocumento1 páginaProblemas de álgebra polinomialCarlos Purizaca EcheAún no hay calificaciones
- Ejercicio Polinomio de Lagrange y NewtonDocumento3 páginasEjercicio Polinomio de Lagrange y NewtonALAún no hay calificaciones
- 100000I28N ProcesamientoDigitalDeSenalesDocumento6 páginas100000I28N ProcesamientoDigitalDeSenalesLeonardoCueva100% (1)
- Algoritmos de Búsqueda y OrdenaciónDocumento107 páginasAlgoritmos de Búsqueda y Ordenacióntsuru108Aún no hay calificaciones
- Polinomios Especiales y sus PropiedadesDocumento7 páginasPolinomios Especiales y sus Propiedadesbenjamin ccoiccaAún no hay calificaciones
- Agente Viajero-Algoritmos GeneticosDocumento15 páginasAgente Viajero-Algoritmos GeneticosAxler Holland RoadAún no hay calificaciones
- Division 2Documento4 páginasDivision 2Juan Pablo Flores GuzmánAún no hay calificaciones
- Tema4 - 2 Divide y VencerasDocumento54 páginasTema4 - 2 Divide y VencerasVictor Toshiaki100% (1)
- Ejercicios. Soluciones Numéricas para Ecuaciones Diferenciales Método de EulerDocumento23 páginasEjercicios. Soluciones Numéricas para Ecuaciones Diferenciales Método de EulerMisael diaz diazAún no hay calificaciones
- Taller Metodos NumericosDocumento14 páginasTaller Metodos NumericosAdres Felipe Infante OrtegaAún no hay calificaciones
- Polinomio de Interpolación de NewtonDocumento9 páginasPolinomio de Interpolación de NewtonJuan Carlos Lluncor AcaroAún no hay calificaciones
- Factorizacion de Polinomios - 3° (Nivel Basico)Documento1 páginaFactorizacion de Polinomios - 3° (Nivel Basico)Joel Gilber Capcha GarcilazoAún no hay calificaciones
- Lista de Comandos de MatlabDocumento4 páginasLista de Comandos de MatlabhvinuezaAún no hay calificaciones
- Algoritmo de BresenhamDocumento1 páginaAlgoritmo de BresenhamelkillyAún no hay calificaciones
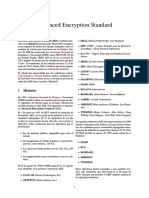
- Advanced Encryption StandardDocumento5 páginasAdvanced Encryption StandardPaul SworkzangsterskyAún no hay calificaciones
- Sistemas de Dos Ecuaciones Con Dos IncognitasDocumento7 páginasSistemas de Dos Ecuaciones Con Dos IncognitasAndrea Cristina Ramos MartinezAún no hay calificaciones
- Problema Del Árbol Expandido MínimoDocumento9 páginasProblema Del Árbol Expandido MínimoLuis Arturo MunguiaAún no hay calificaciones
- Algoritmos GeneticosDocumento16 páginasAlgoritmos GeneticosMarco DuarteAún no hay calificaciones
- Aplicaciones de la regla de Simpson para estimar promedios de temperatura y distancia recorridaDocumento5 páginasAplicaciones de la regla de Simpson para estimar promedios de temperatura y distancia recorridaMabel Rocio Garcia RuizAún no hay calificaciones
- Problema 8 reinasDocumento3 páginasProblema 8 reinasLuis David Santos AguilarAún no hay calificaciones
- Solucionario Del Examen Parcial - Metodos Numericos - Grupo 4Documento14 páginasSolucionario Del Examen Parcial - Metodos Numericos - Grupo 4Cesar Ve0% (1)
- Leccion 1 Evaluacion de IntegralesDocumento2 páginasLeccion 1 Evaluacion de Integraleslarval stalkerAún no hay calificaciones
- Problemas de física general en un año olímpicoDe EverandProblemas de física general en un año olímpicoCalificación: 5 de 5 estrellas5/5 (1)
- Investigación de operaciones: Conceptos fundamentalesDe EverandInvestigación de operaciones: Conceptos fundamentalesCalificación: 4.5 de 5 estrellas4.5/5 (2)
- La Biblia de las Matemáticas RápidasDe EverandLa Biblia de las Matemáticas RápidasCalificación: 4.5 de 5 estrellas4.5/5 (19)
- Estadística básica: Introducción a la estadística con RDe EverandEstadística básica: Introducción a la estadística con RCalificación: 5 de 5 estrellas5/5 (8)
- Mentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraDe EverandMentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraCalificación: 4.5 de 5 estrellas4.5/5 (5)
- AngularJS: Conviértete en el profesional que las compañías de software necesitan.De EverandAngularJS: Conviértete en el profesional que las compañías de software necesitan.Calificación: 3.5 de 5 estrellas3.5/5 (3)
- La guía definitiva en Matemáticas para el Ingreso al BachilleratoDe EverandLa guía definitiva en Matemáticas para el Ingreso al BachilleratoCalificación: 4.5 de 5 estrellas4.5/5 (9)
- El físico y el filósofo: Albert Einstein, Henri Bergson y el debate que cambió nuestra comprensión del tiempoDe EverandEl físico y el filósofo: Albert Einstein, Henri Bergson y el debate que cambió nuestra comprensión del tiempoAún no hay calificaciones
- Visualización: Cambie su vida en cuatro semanas utilizando la ley de atracciónDe EverandVisualización: Cambie su vida en cuatro semanas utilizando la ley de atracciónCalificación: 5 de 5 estrellas5/5 (18)
- Cuántica: Qué significa la teoría de la ciencia más extrañaDe EverandCuántica: Qué significa la teoría de la ciencia más extrañaCalificación: 1 de 5 estrellas1/5 (1)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDe EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroCalificación: 4 de 5 estrellas4/5 (1)
- La Teoría de Conjuntos y los Fundamentos de las MatemáticasDe EverandLa Teoría de Conjuntos y los Fundamentos de las MatemáticasCalificación: 5 de 5 estrellas5/5 (1)
- El cerebro matemático: Cómo nacen, viven y a veces mueren los números en nuestra menteDe EverandEl cerebro matemático: Cómo nacen, viven y a veces mueren los números en nuestra menteCalificación: 4 de 5 estrellas4/5 (5)
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoDe EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Álgebra lineal aplicada a las ciencias económicas 2edDe EverandÁlgebra lineal aplicada a las ciencias económicas 2edCalificación: 4 de 5 estrellas4/5 (1)
- Enseñar Matemática hoy: Miradas, sentidos y desafíosDe EverandEnseñar Matemática hoy: Miradas, sentidos y desafíosCalificación: 5 de 5 estrellas5/5 (1)
- El gran libro de PHP: Creación de páginas web dinámicas (2ª EDICION)De EverandEl gran libro de PHP: Creación de páginas web dinámicas (2ª EDICION)Aún no hay calificaciones
- Didáctica de la matemática en la escuela primariaDe EverandDidáctica de la matemática en la escuela primariaCalificación: 2.5 de 5 estrellas2.5/5 (3)