También podría gustarte
- Guia de ChatgptDocumento6 páginasGuia de ChatgptMick Jagger Taya FloresAún no hay calificaciones
- Confirmación de Su Reserva Ibis Styles Paris Val de Fontenay N.º LGBLHPDXDocumento6 páginasConfirmación de Su Reserva Ibis Styles Paris Val de Fontenay N.º LGBLHPDXRico JLAún no hay calificaciones
- PRT04 - Ejercicio de Normalización - Melany OzunaDocumento5 páginasPRT04 - Ejercicio de Normalización - Melany OzunaMaria SánchezAún no hay calificaciones
- Descripcion de Fases RibaDocumento1 páginaDescripcion de Fases RibaMaikol Lope AriasAún no hay calificaciones
- Atributos de CalidadDocumento2 páginasAtributos de CalidadCarlos CardonaAún no hay calificaciones
- Manual de SAP2000 - Julio 09 - R0 PDFDocumento4 páginasManual de SAP2000 - Julio 09 - R0 PDFDashiell Munarriz OtinianoAún no hay calificaciones
- Man Dispositivos Circuitos Electronicos 2022-1 UnlockedDocumento57 páginasMan Dispositivos Circuitos Electronicos 2022-1 UnlockedPaola YGAún no hay calificaciones
- González Orellana Cherie - PostulacionDocumento29 páginasGonzález Orellana Cherie - PostulacionMartin Gallegos BorcoskiAún no hay calificaciones
- Plan de Estudios - Estudiantes - Diseño UX-UI 2023Documento8 páginasPlan de Estudios - Estudiantes - Diseño UX-UI 2023Lucas QuirogaAún no hay calificaciones
- Programación PIC en C - Variables y Tipos de DatosDocumento3 páginasProgramación PIC en C - Variables y Tipos de DatosValeria Cristina Gonzalez PachecoAún no hay calificaciones
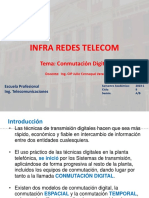
- Infra Redes Telec - s9 - Conmutacion DigitalDocumento28 páginasInfra Redes Telec - s9 - Conmutacion DigitalHugo MateoAún no hay calificaciones
- Empresa Caso Apple InformeDocumento19 páginasEmpresa Caso Apple InformeTatiana Monja CastroAún no hay calificaciones
- Practica 1 MicroprocesadoresDocumento9 páginasPractica 1 MicroprocesadoresJosé Jorge Santiago ZepedaAún no hay calificaciones
- Compendio de Raz. Matemàtico - VacacionalDocumento59 páginasCompendio de Raz. Matemàtico - VacacionalJollet DíazAún no hay calificaciones
- Onu Gboptic GB-705-GWDDocumento7 páginasOnu Gboptic GB-705-GWD200502632Aún no hay calificaciones
- Solucion Actividad 1Documento1 páginaSolucion Actividad 1Yamileth Pantoja AraujoAún no hay calificaciones
- Guia para Participar en El Proceso de Selección PDFDocumento1 páginaGuia para Participar en El Proceso de Selección PDFPAPELERIAAún no hay calificaciones
- Examen Cadena 1Documento18 páginasExamen Cadena 1yukyAún no hay calificaciones
- Inclusión de Enunciados (Material II)Documento4 páginasInclusión de Enunciados (Material II)Cristóbal Eloy MárquezAún no hay calificaciones
- Gerencia de Mercadeo y PublicidadDocumento8 páginasGerencia de Mercadeo y PublicidadHamna TiradoAún no hay calificaciones
- Informatica PresentDocumento18 páginasInformatica PresentFernanda VelázquezAún no hay calificaciones
- Cuadro Comparativo de Áreas de Cómputo - Rene - ChoqueDocumento3 páginasCuadro Comparativo de Áreas de Cómputo - Rene - ChoqueEdith alania achoAún no hay calificaciones
- Resumen de Cuenta 14-01-2021Documento12 páginasResumen de Cuenta 14-01-2021Andrea MartinAún no hay calificaciones
- Teoremas de Redes de CC: Electricidad y Electrónica BásicasDocumento76 páginasTeoremas de Redes de CC: Electricidad y Electrónica BásicasMi LuanaAún no hay calificaciones
- Ex KaizenDocumento2 páginasEx Kaizenyesika menesesAún no hay calificaciones
- El Aprendizaje en La Era DigitalDocumento18 páginasEl Aprendizaje en La Era DigitalAdolfo LazaroAún no hay calificaciones
- Proyecto de InvestigaciónDocumento10 páginasProyecto de InvestigaciónSuper AndroidAún no hay calificaciones
- Caso-Conexion Segura-2Documento2 páginasCaso-Conexion Segura-2AragonZAún no hay calificaciones
- Tu PuedesDocumento172 páginasTu PuedesSERGIO ALEJANDRO HAZBUN HERNANDEZAún no hay calificaciones
- TP 1Documento5 páginasTP 1Mariano Martín CerveraAún no hay calificaciones