También podría gustarte
- Sigilo Mason Willow Fox ZDocumento181 páginasSigilo Mason Willow Fox ZLeticia Abdon Critelli100% (1)
- Contrato Privado de Transferencia Posecion de Una MototaxiDocumento3 páginasContrato Privado de Transferencia Posecion de Una MototaxiHernan Luis Trejo Huamani0% (1)
- BT2047 - Operation Manual SpanishDocumento253 páginasBT2047 - Operation Manual SpanishJhon Fabio Parra100% (4)
- Hoja de Datos Puente GruaDocumento1 páginaHoja de Datos Puente Gruayoselin Ayala RamosAún no hay calificaciones
- Compresión Relativa - Cristopher GuanoquizaDocumento9 páginasCompresión Relativa - Cristopher GuanoquizaCristopher Dylan Guanoquiza GuerreroAún no hay calificaciones
- Practica 10Documento3 páginasPractica 10Gerardo PadronAún no hay calificaciones
- Informe Técnico Unidad 6 y 7Documento18 páginasInforme Técnico Unidad 6 y 7Gerardo PadronAún no hay calificaciones
- Reporte UnidadDocumento4 páginasReporte UnidadGerardo PadronAún no hay calificaciones
- Practica Motor PapDocumento5 páginasPractica Motor PapGerardo PadronAún no hay calificaciones
- Parte 2Documento29 páginasParte 2Gerardo PadronAún no hay calificaciones
- GUÍA Onda Luminosa, RefracciónDocumento4 páginasGUÍA Onda Luminosa, RefracciónGerardo PadronAún no hay calificaciones
- Presentacion Sistema Integrado de Gestion - ConductoresDocumento18 páginasPresentacion Sistema Integrado de Gestion - ConductoresEsperanza VanegasAún no hay calificaciones
- Historial de Mantenimiento Tractor #511. TD5.80Documento43 páginasHistorial de Mantenimiento Tractor #511. TD5.80ReinaldoAún no hay calificaciones
- Boletin PV4 Enero-Febrero-2020 - PDocumento213 páginasBoletin PV4 Enero-Febrero-2020 - PDeived SanzAún no hay calificaciones
- CREMALLERASDocumento4 páginasCREMALLERASMARTIN MAMANI HUAYTAAún no hay calificaciones
- Instrumentos de MedicionDocumento10 páginasInstrumentos de MedicionMariano BonolaAún no hay calificaciones
- TIG Toyota DI-2Documento44 páginasTIG Toyota DI-2edgard100% (2)
- Manual Grupos Electrogenos Cummins Diesel 45 250kvaDocumento34 páginasManual Grupos Electrogenos Cummins Diesel 45 250kvaLuisana Leon martinezAún no hay calificaciones
- Ficha Técnica - Selenia AbarthDocumento2 páginasFicha Técnica - Selenia AbarthDanielGarciaInfantesAún no hay calificaciones
- La Evolución de Los Autos y Su Impacto en La Vida ModernaDocumento2 páginasLa Evolución de Los Autos y Su Impacto en La Vida ModernaBalsasaAún no hay calificaciones
- IzajeDocumento29 páginasIzajeLuis Angel RojasAún no hay calificaciones
- V Ec140blc LCM d4d Ebe2 37d4351640 2004 04Documento12 páginasV Ec140blc LCM d4d Ebe2 37d4351640 2004 04Camilo Andrés Perdomo VelascoAún no hay calificaciones
- Edicion 279 DigitalDocumento90 páginasEdicion 279 DigitalRicardo CesarAún no hay calificaciones
- Actividad 3Documento8 páginasActividad 3LawebcafeLawebInterAún no hay calificaciones
- 1 Cat A Banco 2021Documento28 páginas1 Cat A Banco 2021Jhon Wilson Choque PimientaAún no hay calificaciones
- Diseño Dia 1 Ec1 2022 2Documento3 páginasDiseño Dia 1 Ec1 2022 2francis huarcayaAún no hay calificaciones
- Modelos VehículosDocumento4 páginasModelos VehículosDiego XavierAún no hay calificaciones
- Alertas y Mantenimiento BlueHDi PpsDocumento37 páginasAlertas y Mantenimiento BlueHDi PpsFranTSBAún no hay calificaciones
- FIGO17Documento1 páginaFIGO17jose antonio jimenez davalosAún no hay calificaciones
- AttachmentDocumento41 páginasAttachmentolgaAún no hay calificaciones
- S&P Extractor Axial HXM 200-250-350Documento2 páginasS&P Extractor Axial HXM 200-250-350Solucionesenfrio saAún no hay calificaciones
- TALLER MÁQUINAS HERRAMIENTAS 2° Año ABCD. Prof. Almada SimonellaDocumento12 páginasTALLER MÁQUINAS HERRAMIENTAS 2° Año ABCD. Prof. Almada Simonellalucast0293Aún no hay calificaciones
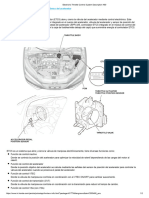
- Descripción Del Sistema de Control Electrónico Del Acelerador HR-V 2016-2022Documento2 páginasDescripción Del Sistema de Control Electrónico Del Acelerador HR-V 2016-2022anibalherreraAún no hay calificaciones
- Manual de Partes One ST 100Documento55 páginasManual de Partes One ST 100CRISTIAN DAVID DUARTE TORRESAún no hay calificaciones
- Arranque Sin Receptaculo - Directo A Las BateriasDocumento3 páginasArranque Sin Receptaculo - Directo A Las BateriasErnie SebastiánAún no hay calificaciones
- Informe N°2Documento17 páginasInforme N°2PremiumJust4Uv67771 AdminAún no hay calificaciones