También podría gustarte
- Escaleras de OrmigonDocumento3 páginasEscaleras de Ormigonceilia altamiranoAún no hay calificaciones
- Señales de Transito Vte LopezDocumento12 páginasSeñales de Transito Vte LopezAgustin Porrazzo73% (11)
- Guion 11SDocumento2 páginasGuion 11Saye uwuAún no hay calificaciones
- Catalogo de Codigos de Falla Toyota DynaDocumento1 páginaCatalogo de Codigos de Falla Toyota DynaadelsoAún no hay calificaciones
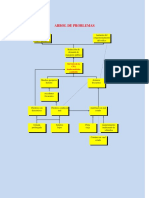
- Arbol de ProblemasDocumento2 páginasArbol de ProblemasMarcelo llanque chambillaAún no hay calificaciones
- Procedimiento ConstructivoDocumento7 páginasProcedimiento ConstructivoYolanda MorenoAún no hay calificaciones
- Check List Alza HombreDocumento2 páginasCheck List Alza HombreCarlos SuarezAún no hay calificaciones
- CHECK LIST AUDITORIA BUQUE IsmDocumento9 páginasCHECK LIST AUDITORIA BUQUE IsmPEDRO JAYA0% (1)
- Brochure Zeus 380Documento25 páginasBrochure Zeus 380Cesar EspinozaAún no hay calificaciones
- Tabla de Severidad de Vibracion Iso10816Documento1 páginaTabla de Severidad de Vibracion Iso10816Javier CamachoAún no hay calificaciones
- Automovilistica Veracruzana Sa de CV CopDocumento2 páginasAutomovilistica Veracruzana Sa de CV Coparmando sanchez0% (1)
- Incoterms 2020Documento15 páginasIncoterms 2020Luisa Gonzáles AlegríaAún no hay calificaciones
- Cuaderno de Informe Tarea #9Documento12 páginasCuaderno de Informe Tarea #9Yeferson AraujoAún no hay calificaciones
- Materiales y Equipos OPRDocumento149 páginasMateriales y Equipos OPRJhohan Mauricio LOZANO GARCIAAún no hay calificaciones
- Hs Luprograin Basf Ac OrganicosDocumento14 páginasHs Luprograin Basf Ac OrganicosHernan BonillaAún no hay calificaciones
- Procesos Industriales Ensamblaje VirtualDocumento17 páginasProcesos Industriales Ensamblaje VirtualLuis Felipe Morales PerezAún no hay calificaciones
- Velazquez Medina - Perkins EnginesDocumento1 páginaVelazquez Medina - Perkins EnginesAbelardo VelazquezAún no hay calificaciones
- Ashlie y Katrina Maquinas TermicasDocumento7 páginasAshlie y Katrina Maquinas TermicasAshlie SantosAún no hay calificaciones
- Presentación 133Documento2 páginasPresentación 133Vivi HerreraAún no hay calificaciones
- Códigos de Fallos de Un Dirección Asistida EléctricamenteDocumento7 páginasCódigos de Fallos de Un Dirección Asistida EléctricamenteEdison Rivera ayalaAún no hay calificaciones
- Gestión UrbanaDocumento18 páginasGestión UrbanaKamil ReyesAún no hay calificaciones
- Informacion Relevante SucamecDocumento14 páginasInformacion Relevante SucamecMiguel Angel Beltran vilchezAún no hay calificaciones
- Mecanismos AutomaticosDocumento8 páginasMecanismos AutomaticosAndrés JaramilloAún no hay calificaciones
- Taller Abril 4 Karen MontesDocumento5 páginasTaller Abril 4 Karen Monteskevinmmp3Aún no hay calificaciones
- Pducp SLP 27 Abr 2021Documento625 páginasPducp SLP 27 Abr 2021Monica Ailyn Martinez de la RosaAún no hay calificaciones
- Generador A Gasolina 5 5 KWDocumento2 páginasGenerador A Gasolina 5 5 KWynogalesAún no hay calificaciones
- Información de Servicio Camiones: Suplemento A Códigos de Avería EBS/ESP Gen3Documento36 páginasInformación de Servicio Camiones: Suplemento A Códigos de Avería EBS/ESP Gen3David GuioAún no hay calificaciones
- Mapa de EcorregionesDocumento1 páginaMapa de Ecorregioneslionel hansAún no hay calificaciones
- 45 Topografia de TunelesDocumento35 páginas45 Topografia de TunelesKatherine Quintero OrtízAún no hay calificaciones
- Luis Tixe - ResumenDocumento5 páginasLuis Tixe - ResumenJuan TixeAún no hay calificaciones