También podría gustarte
- Normalización de Bases de Datos - Wikipedia, La Enciclopedia LibreDocumento9 páginasNormalización de Bases de Datos - Wikipedia, La Enciclopedia Librealfonso2000Aún no hay calificaciones
- Tarea 1 b2 Estadistica 2Documento6 páginasTarea 1 b2 Estadistica 2Franklin VargasAún no hay calificaciones
- Proyecto 2PDocumento5 páginasProyecto 2PLuis FerAún no hay calificaciones
- Matemáticas y Psicoanálisis - El Diagnóstico Felix MoralesDocumento3 páginasMatemáticas y Psicoanálisis - El Diagnóstico Felix MoraleslunacuAún no hay calificaciones
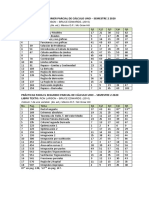
- Prácticas Calculo Uno 1 2020Documento1 páginaPrácticas Calculo Uno 1 2020Diego Espinoza TorricoAún no hay calificaciones
- Lista de Útiles Escolares 2º Año Básico 2022 - 045416Documento1 páginaLista de Útiles Escolares 2º Año Básico 2022 - 045416joseAún no hay calificaciones
- La Fijación de La CreenciaDocumento14 páginasLa Fijación de La CreenciaMauro JuarezAún no hay calificaciones
- Informe Del Ensayo Experimental N°05 - CortijoDocumento14 páginasInforme Del Ensayo Experimental N°05 - CortijoAlejandro Cortijo CastilloAún no hay calificaciones
- Semana 10 - SucesionesDocumento4 páginasSemana 10 - SucesionesRosmeri LlanosAún no hay calificaciones
- Sistema de Control1 Semana 7Documento5 páginasSistema de Control1 Semana 7valdemar barrientosAún no hay calificaciones
- 1 Lenguaje para TodosDocumento52 páginas1 Lenguaje para TodosLeonardoAún no hay calificaciones
- Districucion BinomialDocumento2 páginasDistricucion BinomialJuan CruzAún no hay calificaciones
- Cap. III Referencias Ypfb TransporteDocumento35 páginasCap. III Referencias Ypfb Transportealex gunnarAún no hay calificaciones
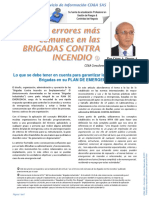
- Los 20 Errores Mas Comunes en Las BRIGAD PDFDocumento6 páginasLos 20 Errores Mas Comunes en Las BRIGAD PDFRecursos humanos100% (1)
- Guía Práctica de Ejercicios en Pascal PDFDocumento9 páginasGuía Práctica de Ejercicios en Pascal PDFAdolfoAún no hay calificaciones
- Peirce y La Escolástica HispánicaDocumento40 páginasPeirce y La Escolástica Hispánicafredy ruilova lituma100% (2)
- Ejercicios de Repaso Primer ParcialDocumento10 páginasEjercicios de Repaso Primer ParcialMauricio Peña Portillo50% (6)
- Control de Vuelo de Un CoheteDocumento23 páginasControl de Vuelo de Un CoheteTzadick SchwerinAún no hay calificaciones
- ?5o Repaso Matemática Dino MaterialesDocumento90 páginas?5o Repaso Matemática Dino MaterialesALBA MARITZA APONZA100% (3)
- George B. DantzingDocumento1 páginaGeorge B. DantzingAtlas BS100% (1)
- Algoritmo AlmacenesDocumento4 páginasAlgoritmo AlmacenesNicolasBuffaAún no hay calificaciones
- Formula Black ScholesDocumento5 páginasFormula Black ScholesAndrea Katherine Unda QuintanaAún no hay calificaciones
- Axonometrias y Perspectiva Isométrica - 10endibujoDocumento17 páginasAxonometrias y Perspectiva Isométrica - 10endibujoannuunakiAún no hay calificaciones
- 2do Grado MatematicaDocumento5 páginas2do Grado Matematicaciber skAún no hay calificaciones
- Anexo 2 - Plantilla de Presentación Tarea 2 FUNDAMENTOS de MATEMATICADocumento11 páginasAnexo 2 - Plantilla de Presentación Tarea 2 FUNDAMENTOS de MATEMATICAYojaira PadillaAún no hay calificaciones
- Composicion y Equilibrio en La ComposicionDocumento24 páginasComposicion y Equilibrio en La ComposicionJose Feliciano Reyes100% (5)
- VectoresDocumento10 páginasVectoresFernando TinitanaAún no hay calificaciones
- Notas Met 1 2014Documento85 páginasNotas Met 1 2014anacorreaAún no hay calificaciones
- Sistemas NuméricosDocumento46 páginasSistemas NuméricosIsotopos RadiactivosAún no hay calificaciones
- Material Deestadistica Inferencial-2018Documento71 páginasMaterial Deestadistica Inferencial-2018abigailAún no hay calificaciones