También podría gustarte
- Docc 18541jjgDocumento1 páginaDocc 18541jjgCarloz JozeAún no hay calificaciones
- Resoluci N Gerencial Regional de Infraestructura N 0145-2017-GR-JUNIN GRIDocumento6 páginasResoluci N Gerencial Regional de Infraestructura N 0145-2017-GR-JUNIN GRICarloz JozeAún no hay calificaciones
- Fernando ObservacionesDocumento1 páginaFernando ObservacionesCarloz JozeAún no hay calificaciones
- Docc - 1853866 c4 Carlos Jose PDFDocumento1 páginaDocc - 1853866 c4 Carlos Jose PDFCarloz JozeAún no hay calificaciones
- Docc - 1853866 c4 Carlos Jose PDFDocumento1 páginaDocc - 1853866 c4 Carlos Jose PDFCarloz JozeAún no hay calificaciones
- Ficha S35 Día 2Documento2 páginasFicha S35 Día 2Carloz JozeAún no hay calificaciones
- Grapas y Pines 1Documento1 páginaGrapas y Pines 1Carloz JozeAún no hay calificaciones
- Aa1 Jose PDFDocumento3 páginasAa1 Jose PDFCarloz JozeAún no hay calificaciones
- Examen Final de Gestion de ProyectosDocumento32 páginasExamen Final de Gestion de ProyectosTeodoro German Balarezo33% (9)
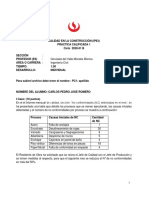
- PC1 - Jose RomeroDocumento6 páginasPC1 - Jose RomeroCarloz Joze100% (1)
- IsosistasDocumento11 páginasIsosistasMarco Flores ZuñigaAún no hay calificaciones
- Análisis Comparativo para El Diseño de TablestacasDocumento119 páginasAnálisis Comparativo para El Diseño de TablestacasCarloz JozeAún no hay calificaciones
- Mapa de Distribucion de Maximas Intensidades SismicasDocumento1 páginaMapa de Distribucion de Maximas Intensidades SismicasCarloz Joze100% (1)
- Muros PantallaDocumento191 páginasMuros PantallaCarloz JozeAún no hay calificaciones
- 04-27 Comunicacion - 3ER GRADO PDFDocumento2 páginas04-27 Comunicacion - 3ER GRADO PDFCarloz JozeAún no hay calificaciones
- Encofrado y Accesorios Incompletos 1 PDFDocumento1 páginaEncofrado y Accesorios Incompletos 1 PDFCarloz JozeAún no hay calificaciones
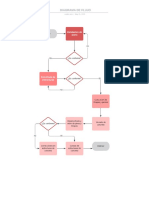
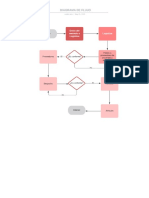
- Diagrama de FlujoDocumento1 páginaDiagrama de FlujoCarloz JozeAún no hay calificaciones
- Control de Calidad Del Concreto ACI PDFDocumento6 páginasControl de Calidad Del Concreto ACI PDFHugo Coanqui Quispe100% (1)
- 04-27 Comunicacion - 3ER GRADO PDFDocumento2 páginas04-27 Comunicacion - 3ER GRADO PDFCarloz JozeAún no hay calificaciones
- CASO 1 - Calidad en La ConstrucciónDocumento6 páginasCASO 1 - Calidad en La ConstrucciónCarloz JozeAún no hay calificaciones
- 04-27 Comunicacion - 3ER GRADO PDFDocumento2 páginas04-27 Comunicacion - 3ER GRADO PDFCarloz JozeAún no hay calificaciones
- IntroduccionesDocumento4 páginasIntroduccionesCarloz JozeAún no hay calificaciones
- 04-27 Comunicacion - 3ER GRADO PDFDocumento2 páginas04-27 Comunicacion - 3ER GRADO PDFCarloz JozeAún no hay calificaciones
- Encofrados y Accesorios Incompletos 2 PDFDocumento1 páginaEncofrados y Accesorios Incompletos 2 PDFCarloz JozeAún no hay calificaciones
- Tesis Costos de MurosDocumento152 páginasTesis Costos de Muroscfpc10459Aún no hay calificaciones
- Diseño de Muros de Contencion Como Defensa Ribereña, Tramo Huaura-Sayan Del Rio HuauraDocumento86 páginasDiseño de Muros de Contencion Como Defensa Ribereña, Tramo Huaura-Sayan Del Rio HuauraCarloz JozeAún no hay calificaciones
- Defensa de Tablestacas y Pilotes en Margenes de RiosDocumento8 páginasDefensa de Tablestacas y Pilotes en Margenes de RiosCarloz Joze100% (1)
- Plano 2 La Hacienda II Lote 15Documento1 páginaPlano 2 La Hacienda II Lote 15Carloz JozeAún no hay calificaciones
- TF Planificacion La Rosa ParkDocumento36 páginasTF Planificacion La Rosa ParkCarloz JozeAún no hay calificaciones