También podría gustarte
- Planeación Ciencias II Fisica Primer Trimestre E. CastilloDocumento28 páginasPlaneación Ciencias II Fisica Primer Trimestre E. CastilloChristianLazos80% (15)
- Norma ASTM E8 en EspañolDocumento108 páginasNorma ASTM E8 en EspañolFilomenos Panfilo Deagor90% (10)
- p1 LIQ 2 1 (Autoguardado)Documento12 páginasp1 LIQ 2 1 (Autoguardado)sandruka605Aún no hay calificaciones
- LABORATORIO DE FÍSICA I - Caida LibreDocumento12 páginasLABORATORIO DE FÍSICA I - Caida LibreJuan Camilo Avila RestrepoAún no hay calificaciones
- ViguetaDocumento87 páginasViguetakoam00167% (3)
- Temas Final Fisica 1Documento4 páginasTemas Final Fisica 1fernandoAún no hay calificaciones
- Informe Topografia - Valle AmautaDocumento18 páginasInforme Topografia - Valle AmautaMiquer Julca ZanabriaAún no hay calificaciones
- 02.03.06 Apoyo de Neopreno para Puentes 3Documento3 páginas02.03.06 Apoyo de Neopreno para Puentes 3fredy Mamani0% (1)
- Brochure para ClientesDocumento9 páginasBrochure para ClientesYeimar RisalesAún no hay calificaciones
- Capitulo 12 PDFDocumento27 páginasCapitulo 12 PDFMarco Antonio VeraAún no hay calificaciones
- Lab 7orgánica 2 UNSCHDocumento15 páginasLab 7orgánica 2 UNSCHRoberto Neyder Fernández NajarroAún no hay calificaciones
- Calibracion VolumetricoDocumento11 páginasCalibracion Volumetricodanicana100% (1)
- HS Soda Caustica 32Documento5 páginasHS Soda Caustica 32Manuelin RojasAún no hay calificaciones
- Cachimbo BlancoDocumento11 páginasCachimbo BlancoCedric BartonAún no hay calificaciones
- Funcionamiento de Una TurbinaDocumento14 páginasFuncionamiento de Una TurbinaTania Mabel Gutierrez MaytaAún no hay calificaciones
- La Técnica de Fijar La MiradaDocumento1 páginaLa Técnica de Fijar La MiradaAnis MéndezAún no hay calificaciones
- Análisis de La Clorofila-A en El Agua Con Técnicas de Teledetección en Lago TiticacaDocumento13 páginasAnálisis de La Clorofila-A en El Agua Con Técnicas de Teledetección en Lago TiticacaShyllenne Ortyz RolongAún no hay calificaciones
- Taller 5Documento8 páginasTaller 5Andrea RodriguezAún no hay calificaciones
- Manual de Instrucciones Balay 3vf304naDocumento34 páginasManual de Instrucciones Balay 3vf304naJUANA PERESAún no hay calificaciones
- M.Sc. Ing. Gerber J. Zavala AscañoDocumento17 páginasM.Sc. Ing. Gerber J. Zavala AscañoDaniel ApAún no hay calificaciones
- Teoría de JuegosDocumento10 páginasTeoría de JuegosLuis Gil AraqueAún no hay calificaciones
- Área Bajo La CurvaDocumento10 páginasÁrea Bajo La CurvaGimnasio moderno Albert einstein67% (3)
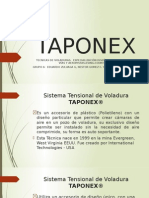
- Presentación Taponex EsingDocumento31 páginasPresentación Taponex EsingNelson Ricardo Beltrán Mojica100% (2)
- Secuencia Didactica Guiada Quimica 1Documento138 páginasSecuencia Didactica Guiada Quimica 1malpica79Aún no hay calificaciones
- TESIS - Goldner - MC Vinos PDFDocumento189 páginasTESIS - Goldner - MC Vinos PDFAna LuciaAún no hay calificaciones
- Libro FinalDocumento246 páginasLibro Finalvictor100% (1)
- Problemas Resueltos Concreto Armado IIDocumento186 páginasProblemas Resueltos Concreto Armado IILeonel Ventura100% (1)
- Ejercicios y Gráficas Tarea 5 - ADocumento2 páginasEjercicios y Gráficas Tarea 5 - AWROSEROMAún no hay calificaciones
- Ensayo de MarshallDocumento19 páginasEnsayo de MarshallAnonymous l15lfVa1BAún no hay calificaciones
- El Magnetismo en La NaturalezaDocumento4 páginasEl Magnetismo en La NaturalezaKarlita Nohely Montoya RojasAún no hay calificaciones