También podría gustarte
- Medina Samuel Diseño Protesis Tesis PDFDocumento123 páginasMedina Samuel Diseño Protesis Tesis PDFMiguel PintadoAún no hay calificaciones
- Guia Inst Matlab DMSC012020 PDFDocumento28 páginasGuia Inst Matlab DMSC012020 PDFOmar GeedorahAún no hay calificaciones
- Obtencion de Un Modelo Dinamico para Un Robot 3RRR PDFDocumento7 páginasObtencion de Un Modelo Dinamico para Un Robot 3RRR PDFOmar GeedorahAún no hay calificaciones
- Control Mediante Logica Difusa - Fuzzy-Tecnicas Modernas en AutomaticaDocumento7 páginasControl Mediante Logica Difusa - Fuzzy-Tecnicas Modernas en AutomaticaJorge Ismael López UgaldeAún no hay calificaciones
- Extracción de Características y Clasificación de Señales Electromiográficas Utilizando La Transformada Hilbert-Huang y Redes NeuronalesDocumento119 páginasExtracción de Características y Clasificación de Señales Electromiográficas Utilizando La Transformada Hilbert-Huang y Redes NeuronalesJAVIY2KAún no hay calificaciones
- MantenimientoDocumento6 páginasMantenimientoOmar GeedorahAún no hay calificaciones
- V18n2a05 Pdfaaaa PDFDocumento15 páginasV18n2a05 Pdfaaaa PDFTamyta Alva PeredaAún no hay calificaciones
- Red Neuronal ExpDocumento19 páginasRed Neuronal ExpOmar GeedorahAún no hay calificaciones
- P3 Inv de MercadoDocumento6 páginasP3 Inv de MercadoOmar GeedorahAún no hay calificaciones
- Is1 t12 TransDocumento44 páginasIs1 t12 TransVictor Jesus HernandezAún no hay calificaciones
- Cinematica de ManipuladoresDocumento34 páginasCinematica de ManipuladoresOmar GeedorahAún no hay calificaciones
- Sistema ITC 2018Documento10 páginasSistema ITC 2018Bryan MyAún no hay calificaciones
- Dialnet Robotica 4868954Documento14 páginasDialnet Robotica 4868954JorgeValdzAún no hay calificaciones
- 2015 PDFDocumento207 páginas2015 PDFOmar Geedorah100% (1)
- Modelado Motor CDDocumento3 páginasModelado Motor CDOmar GeedorahAún no hay calificaciones
- P2 Analisis-AmbientalDocumento6 páginasP2 Analisis-AmbientalOmar GeedorahAún no hay calificaciones
- Analisis de Marcha Portatil en 3 Dimensiones 3d PDFDocumento13 páginasAnalisis de Marcha Portatil en 3 Dimensiones 3d PDFOmar GeedorahAún no hay calificaciones
- Modelado Motor CDDocumento3 páginasModelado Motor CDOmar GeedorahAún no hay calificaciones
- Cuestionario Frecuencia RespuestaDocumento7 páginasCuestionario Frecuencia RespuestaOmar GeedorahAún no hay calificaciones
- Sistemas de Control ProtesisDocumento4 páginasSistemas de Control ProtesisOmar GeedorahAún no hay calificaciones
- Ciclo de Marcfha de Protesis TransfemoralDocumento8 páginasCiclo de Marcfha de Protesis TransfemoralArnold Montero SosaAún no hay calificaciones
- ModelosDocumento3 páginasModelosOmar GeedorahAún no hay calificaciones
- FodaDocumento2 páginasFodaOmar GeedorahAún no hay calificaciones
- Separacion MecanicaDocumento8 páginasSeparacion MecanicaOmar GeedorahAún no hay calificaciones
- Proceso AdministrativoDocumento21 páginasProceso AdministrativoOmar GeedorahAún no hay calificaciones
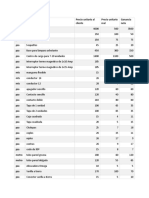
- Cotizaciones CasaDocumento41 páginasCotizaciones CasaOmar GeedorahAún no hay calificaciones
- Arrancadores Magnéticos A Tensión ReducidaDocumento13 páginasArrancadores Magnéticos A Tensión ReducidaOmar GeedorahAún no hay calificaciones
- Cuestionario Frecuencia RespuestaDocumento7 páginasCuestionario Frecuencia RespuestaOmar GeedorahAún no hay calificaciones
- TripticoDocumento2 páginasTripticoElena ArroyoAún no hay calificaciones
- Des Igual Dad EsDocumento17 páginasDes Igual Dad EsblogerportalAún no hay calificaciones
- Clases Matematicas Discretas 5Documento37 páginasClases Matematicas Discretas 5Rafael PérezAún no hay calificaciones
- Interpolacion y Ajuste de Curvas PDFDocumento5 páginasInterpolacion y Ajuste de Curvas PDFJesse MauricioAún no hay calificaciones
- Programación EnteraDocumento5 páginasProgramación EnteraArturo TrejoAún no hay calificaciones
- Coeficiente de ConsolidacionDocumento8 páginasCoeficiente de ConsolidacionJorgeLuchoMolinaVeredasAún no hay calificaciones
- EJERCICIOS CAPITULO 11 KreizygDocumento155 páginasEJERCICIOS CAPITULO 11 KreizygVictor Lopez100% (1)
- Mat Analisis EconomicoDocumento362 páginasMat Analisis EconomicoAntonio Martínez100% (8)
- Tareas e Investigaciones de Ecuaciones DiferencialesDocumento7 páginasTareas e Investigaciones de Ecuaciones DiferencialesEben Contreras MirandaAún no hay calificaciones
- Semana 7Documento34 páginasSemana 7Saúl OrtizAún no hay calificaciones
- Medidas de Tendencia Central en Datos Agrupados Y No AgrupadosDocumento77 páginasMedidas de Tendencia Central en Datos Agrupados Y No AgrupadosSol BustamanteAún no hay calificaciones
- Mat1220 2Documento1 páginaMat1220 2Hernán González AguirreAún no hay calificaciones
- Mapa Conceptual.Documento4 páginasMapa Conceptual.Jose Manuel RodriguezAún no hay calificaciones
- Calculo VectorialDocumento4 páginasCalculo VectorialJOSE LUIS VAZQUEZ OLMOSAún no hay calificaciones
- Metodos Iterativos JACOBI GAUSS SEIDELDocumento8 páginasMetodos Iterativos JACOBI GAUSS SEIDELleonardofigueroaoyolaAún no hay calificaciones
- Actividad 2 Segundo Período TrigonometríaDocumento6 páginasActividad 2 Segundo Período TrigonometríaBryan NarvaezAún no hay calificaciones
- Serie Tema Variables Aleatorias 2Documento9 páginasSerie Tema Variables Aleatorias 2Omar Sanchez CamachoAún no hay calificaciones
- Notas Análisi I Capítulo 1Documento46 páginasNotas Análisi I Capítulo 1Luisa Frías MirandaAún no hay calificaciones
- Guia de Raices II° MedioDocumento7 páginasGuia de Raices II° MedioFabian SantanaAún no hay calificaciones
- 4 Polinomios EspecialesDocumento3 páginas4 Polinomios EspecialesmariaAún no hay calificaciones
- Proyecciones Geograficas.Documento2 páginasProyecciones Geograficas.DylanViloriaPreteltAún no hay calificaciones
- Polinomios Version BlogDocumento33 páginasPolinomios Version BlogJ Pomales100% (7)
- OptimizaciónCasosPrácticos PDFDocumento252 páginasOptimizaciónCasosPrácticos PDFSolomeo ParedesAún no hay calificaciones
- Tarea 2.2 Origen Desarrollo y Aplicacion Del Metodo SimplexDocumento20 páginasTarea 2.2 Origen Desarrollo y Aplicacion Del Metodo SimplexabrqhamAún no hay calificaciones
- Ejemplo de Ecuacion de OndaDocumento9 páginasEjemplo de Ecuacion de OndaIng. Arnulfo Guerra MadridAún no hay calificaciones
- Plano Cartesiano-GeometriaDocumento5 páginasPlano Cartesiano-GeometriaAntonio ChumpitazAún no hay calificaciones
- Funciónes MM-110Documento24 páginasFunciónes MM-110Christian ArteagaAún no hay calificaciones
- Estadistica Ejercicio2Documento2 páginasEstadistica Ejercicio2AlexDarioAún no hay calificaciones