También podría gustarte
- La Guía Definitiva en Matemáticas para el Ingreso a la UniversidadDe EverandLa Guía Definitiva en Matemáticas para el Ingreso a la UniversidadCalificación: 4 de 5 estrellas4/5 (11)
- Problemas Selectos de Fisica UniversitariaDocumento114 páginasProblemas Selectos de Fisica UniversitariaThomas Villarreal88% (65)
- Métodos Matriciales para ingenieros con MATLABDe EverandMétodos Matriciales para ingenieros con MATLABCalificación: 5 de 5 estrellas5/5 (1)
- Sistema Por Unidad PDFDocumento22 páginasSistema Por Unidad PDFJonathan TorresAún no hay calificaciones
- Numeros de Condicion y MatricesDocumento11 páginasNumeros de Condicion y MatricesJuan Carlos Moreno OrtizAún no hay calificaciones
- Introducción a la geometría analíticaDe EverandIntroducción a la geometría analíticaCalificación: 4 de 5 estrellas4/5 (1)
- Ejercicios Resueltos Distribuciones de Probabilidad ContinuaDocumento6 páginasEjercicios Resueltos Distribuciones de Probabilidad ContinuaAMYNNXXXX0% (1)
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Problemas de FisicaDocumento132 páginasProblemas de FisicaAnonymous sRiciCiDAún no hay calificaciones
- Problemas ResueltosDocumento118 páginasProblemas ResueltosIgnacio Sebastian Lopez Sanchez63% (8)
- Que Es ExcelDocumento9 páginasQue Es ExcelSaray LondoñoAún no hay calificaciones
- Álgebra Nobel Verano Omar HerreraDocumento35 páginasÁlgebra Nobel Verano Omar HerreraOMAR FELIPE HERRERA CÁCERES100% (1)
- 200 Examenes PDFDocumento928 páginas200 Examenes PDFSegundoGalvisNietoAún no hay calificaciones
- Geometric modeling in computer: Aided geometric designDe EverandGeometric modeling in computer: Aided geometric designAún no hay calificaciones
- Clase Mincua 12Documento101 páginasClase Mincua 12Alvaro VasquezAún no hay calificaciones
- Solucionario San Marcos 2010Documento15 páginasSolucionario San Marcos 2010juancarlosteeducaAún no hay calificaciones
- Trabajo de Unidad II Algebra SuperiorDocumento23 páginasTrabajo de Unidad II Algebra SuperiorERICK EDUARDO GONZALES CASTROAún no hay calificaciones
- CN Sistemas Ecuaciones Lineales IIDocumento17 páginasCN Sistemas Ecuaciones Lineales IIFelipe OliverosAún no hay calificaciones
- Interpolacion y Ajuste de CurvasDocumento6 páginasInterpolacion y Ajuste de CurvaslincolAún no hay calificaciones
- Transferencia de Masa ProfesorDocumento5 páginasTransferencia de Masa ProfesorL Roberto Bonilla EspinozaAún no hay calificaciones
- Normas Matriciales y Número de CondiciónDocumento10 páginasNormas Matriciales y Número de CondiciónJesús AlbertoAún no hay calificaciones
- Examen Admisión UNI 2013-II - Matemática IDocumento16 páginasExamen Admisión UNI 2013-II - Matemática IJALSAún no hay calificaciones
- Problemas AlgebraDocumento38 páginasProblemas Algebraeworo4realAún no hay calificaciones
- 1Documento6 páginas1Esther MariaAún no hay calificaciones
- Ec. de La Recta 511Documento33 páginasEc. de La Recta 511Jesús ValdésAún no hay calificaciones
- Minimos Cuadrados en MatlabDocumento21 páginasMinimos Cuadrados en MatlabMarjorie Paredes50% (2)
- Trigonometria - Resumen Teorico 1 (Por La Editorial Rubiños)Documento8 páginasTrigonometria - Resumen Teorico 1 (Por La Editorial Rubiños)Tito YalliAún no hay calificaciones
- Matriz CuadráticaDocumento14 páginasMatriz CuadráticaJewel GemAún no hay calificaciones
- Formas Cuadráticas (Álgenra)Documento13 páginasFormas Cuadráticas (Álgenra)Rosell Santa Cruz Monteza100% (1)
- Repaso de Series de PotenciaDocumento45 páginasRepaso de Series de PotenciaAngel Sandonas RomeroAún no hay calificaciones
- Regresión de PolinomiosDocumento18 páginasRegresión de PolinomiosLore GvAún no hay calificaciones
- Ajustes Minimos CuadraticosDocumento9 páginasAjustes Minimos Cuadraticosjuncar25Aún no hay calificaciones
- EP MB535 2006 1 SolucionarioDocumento6 páginasEP MB535 2006 1 SolucionarioJhordy Tinoco CoronelAún no hay calificaciones
- Descomposicion QRDocumento4 páginasDescomposicion QRzarceloAún no hay calificaciones
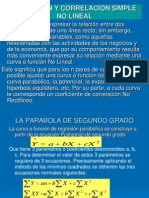
- Regresion y Correlacion Simple No LinealDocumento14 páginasRegresion y Correlacion Simple No LinealKever MallmaAún no hay calificaciones
- Unidad 7 - 3º EsoDocumento7 páginasUnidad 7 - 3º EsofrajavierpmAún no hay calificaciones
- Circunferecnia 3Documento12 páginasCircunferecnia 3G.Daniel Sánchez MejiaAún no hay calificaciones
- Problemas Resueltos Tema 6Documento15 páginasProblemas Resueltos Tema 6manulo85Aún no hay calificaciones
- Ejercicios de Mecanica de SolidosDocumento14 páginasEjercicios de Mecanica de SolidosHarlynYeysonVasquezAún no hay calificaciones
- AN Alisis Num Erico Ii Tarea No. 3: Camila Soto Rosales Ingenier Ia Civil Matem AticaDocumento17 páginasAN Alisis Num Erico Ii Tarea No. 3: Camila Soto Rosales Ingenier Ia Civil Matem AticaCamila Solange Soto RAún no hay calificaciones
- Fórmula de Green, Integral de Superficie, Teorema de StokesDocumento15 páginasFórmula de Green, Integral de Superficie, Teorema de StokesAnonymous JCFQD3Aún no hay calificaciones
- Regresion LinealDocumento21 páginasRegresion Linealhegumy118Aún no hay calificaciones
- 200 ExamenesDocumento928 páginas200 ExamenesMaite GutierrezAún no hay calificaciones
- Todo Sobre La RectaDocumento26 páginasTodo Sobre La RectaNestor MaresAún no hay calificaciones
- Modelado Matemático en IngenieríaDocumento31 páginasModelado Matemático en IngenieríaMonin VolkodlakAún no hay calificaciones
- Regla de CramerDocumento4 páginasRegla de CramerJimmiGonzalezAún no hay calificaciones
- Inecuaciones de Grado SuperiorDocumento25 páginasInecuaciones de Grado SuperiorCHIJFAún no hay calificaciones
- 4-Regresion Por Minimos CuadradosDocumento32 páginas4-Regresion Por Minimos CuadradossaulAún no hay calificaciones
- Inversa Generalizada y Condicional PDFDocumento32 páginasInversa Generalizada y Condicional PDFElaguilahzAún no hay calificaciones
- S2 HT Sistemas de Ecuaciones Lineales SOLUCIONARIO 2017 2Documento13 páginasS2 HT Sistemas de Ecuaciones Lineales SOLUCIONARIO 2017 2sandra reynosoAún no hay calificaciones
- Sesión 17 - Fórmula de GreenDocumento6 páginasSesión 17 - Fórmula de GreenYork Soto HuaripataAún no hay calificaciones
- Tarea 3 - Grupo 22 - Katherine CastelblancoDocumento19 páginasTarea 3 - Grupo 22 - Katherine Castelblancokatherine BellonAún no hay calificaciones
- Libro de Análisis Vectorial de Evaristo 2Documento28 páginasLibro de Análisis Vectorial de Evaristo 2Indira Ocampo JustinianoAún no hay calificaciones
- SL IiiDocumento17 páginasSL Iiifernanda gaticaAún no hay calificaciones
- Factorizacion QRDocumento9 páginasFactorizacion QRAbel BarriosAún no hay calificaciones
- Transformación lineal directa: Aplicaciones prácticas y técnicas en visión por computadora.De EverandTransformación lineal directa: Aplicaciones prácticas y técnicas en visión por computadora.Aún no hay calificaciones
- Cuadro delimitador mínimo: Revelando el poder de la optimización espacial en la visión por computadoraDe EverandCuadro delimitador mínimo: Revelando el poder de la optimización espacial en la visión por computadoraAún no hay calificaciones
- A Nuevo LISTA DE PRECIOS PUBLICO PLAYERYTEES IVA INCLUIDO 2022Documento5 páginasA Nuevo LISTA DE PRECIOS PUBLICO PLAYERYTEES IVA INCLUIDO 2022Adriana Ponce HaroAún no hay calificaciones
- Proyecto de Convivencia y RespetoDocumento146 páginasProyecto de Convivencia y RespetoKeyla Navas Godoy75% (4)
- Microruteo SopetranDocumento36 páginasMicroruteo SopetranLiliana Del PilarAún no hay calificaciones
- Técnicas para Medir DistanciasDocumento24 páginasTécnicas para Medir Distanciasdanieldca100% (1)
- Tesis Gestion de Calidad en Proyectos de Desarrollo de SW Basados en Pmbok y Cccmi DevDocumento167 páginasTesis Gestion de Calidad en Proyectos de Desarrollo de SW Basados en Pmbok y Cccmi DevSantiago JácomeAún no hay calificaciones
- PDF - Explicacion BPMN Caso BásicoDocumento31 páginasPDF - Explicacion BPMN Caso BásicoAbel SalazarAún no hay calificaciones
- CDM Catálogo 25MbDocumento24 páginasCDM Catálogo 25MbCarlos EspinelAún no hay calificaciones
- INFORME N°114-2020. Rescindir Contrato de Ejecutor de 60 Caserios. Concluido Por Ing BuizaDocumento6 páginasINFORME N°114-2020. Rescindir Contrato de Ejecutor de 60 Caserios. Concluido Por Ing BuizaKami Reyes RiveraAún no hay calificaciones
- Tarea Sesión3 - Ley de Little 46-55Documento6 páginasTarea Sesión3 - Ley de Little 46-55Cesar Espinoza VilchezAún no hay calificaciones
- Informde de Medicamentos 12Documento4 páginasInformde de Medicamentos 12Heidy ToalaAún no hay calificaciones
- Estructura de La Personalidad en El Psicoanalisis de FreudDocumento3 páginasEstructura de La Personalidad en El Psicoanalisis de Freudfrancisco vilorioAún no hay calificaciones
- Módulo de Fresadora CNCDocumento34 páginasMódulo de Fresadora CNCDavid CorreiaAún no hay calificaciones
- Informe - Resistencia Del MorteroDocumento5 páginasInforme - Resistencia Del MorteroANGIE CASTRO ANZOLAAún no hay calificaciones
- Tema 2.5 Confianza en Si MismoDocumento2 páginasTema 2.5 Confianza en Si MismoAlejandro Vela Garcia100% (3)
- Obstáculos Al Hablar en PúblicoDocumento14 páginasObstáculos Al Hablar en PúblicoFidel EnriqueAún no hay calificaciones
- Baez MFDL-Javier RKP-SDDocumento96 páginasBaez MFDL-Javier RKP-SDCésar CastilloAún no hay calificaciones
- Mecanica de Rocas IDocumento3 páginasMecanica de Rocas ICruz Quispe ChristianAún no hay calificaciones
- Tipos de ArgumentacionDocumento2 páginasTipos de ArgumentacionMario Andrés Ortega CastilloAún no hay calificaciones
- P41a Ce90 L4 Quispe AcostupaDocumento3 páginasP41a Ce90 L4 Quispe Acostupavictor qAún no hay calificaciones
- Aprendizaje Basado en ProyectosDocumento3 páginasAprendizaje Basado en ProyectosBerenice PrietoAún no hay calificaciones
- Estadística InferencialDocumento3 páginasEstadística InferencialTeam Bass PowerAún no hay calificaciones
- Registros y ControlesDocumento39 páginasRegistros y ControlesYessenia SalazarAún no hay calificaciones
- Guía de Laboratorio 9Documento2 páginasGuía de Laboratorio 9Lusmila FloresAún no hay calificaciones
- Informe de La Práctica Autoguiada Del Segundo BimestreDocumento5 páginasInforme de La Práctica Autoguiada Del Segundo Bimestregabi guamanAún no hay calificaciones
- SujeccionDocumento30 páginasSujeccionHenry Ramirez BedoyaAún no hay calificaciones
- Ivap - Libro Estilo (2005)Documento235 páginasIvap - Libro Estilo (2005)José ArdilesAún no hay calificaciones
- Caso Home DepotDocumento4 páginasCaso Home DepotApolo Romero HernandezAún no hay calificaciones