También podría gustarte
- Empresa DatecDocumento9 páginasEmpresa Datecdakr0n2+gey6d8Aún no hay calificaciones
- Guirao, Pedro - Escritos Pitagóricos La Ensenanza Secreta de PitagorasDocumento154 páginasGuirao, Pedro - Escritos Pitagóricos La Ensenanza Secreta de PitagorasGonçalo Neves100% (1)
- Riegos Mecánicos en El HogarDocumento4 páginasRiegos Mecánicos en El HogaralejoAún no hay calificaciones
- LogisticabateriastoyotaDocumento6 páginasLogisticabateriastoyotaalejoAún no hay calificaciones
- Tarea 5 Ejercicios de Válvulas DireccionalesDocumento2 páginasTarea 5 Ejercicios de Válvulas DireccionalesalejoAún no hay calificaciones
- Ejercicio ParetoDocumento8 páginasEjercicio ParetoalejoAún no hay calificaciones
- TAREA 5 EJERCICIOS DE VÁLVULAS DIRECCIONALES MDocumento1 páginaTAREA 5 EJERCICIOS DE VÁLVULAS DIRECCIONALES MalejoAún no hay calificaciones
- Las Prestaciones Del Vehículo Vendrán Definidas Por El Valor Inferior de Los Dos Límites Indicados de LosDocumento5 páginasLas Prestaciones Del Vehículo Vendrán Definidas Por El Valor Inferior de Los Dos Límites Indicados de LosalejoAún no hay calificaciones
- Designación de Los Neumáticos de Camiones MDocumento5 páginasDesignación de Los Neumáticos de Camiones MalejoAún no hay calificaciones
- Modos de Funcionamiento SiiiiiiiiiDocumento4 páginasModos de Funcionamiento SiiiiiiiiialejoAún no hay calificaciones
- Iso 14000Documento1 páginaIso 14000alejoAún no hay calificaciones
- Gestion AmbientalDocumento5 páginasGestion AmbientalalejoAún no hay calificaciones
- Prueba InstrumentalDocumento1 páginaPrueba InstrumentalalejoAún no hay calificaciones
- Matriz GESTION AMBIENTALDocumento2 páginasMatriz GESTION AMBIENTALalejoAún no hay calificaciones
- Clasificación de MercadoDocumento1 páginaClasificación de MercadoalejoAún no hay calificaciones
- Transferencia de CalorDocumento2 páginasTransferencia de CaloralejoAún no hay calificaciones
- Investigación FluidosDocumento11 páginasInvestigación FluidosalejoAún no hay calificaciones
- Datos Poblacionales EcuadorDocumento2 páginasDatos Poblacionales EcuadoralejoAún no hay calificaciones
- Gestión Ambiental DEFINICIONESDocumento1 páginaGestión Ambiental DEFINICIONESalejoAún no hay calificaciones
- Gestion AmbientalDocumento5 páginasGestion AmbientalalejoAún no hay calificaciones
- BudismoDocumento8 páginasBudismoalejoAún no hay calificaciones
- Población Demográfica SDocumento5 páginasPoblación Demográfica SalejoAún no hay calificaciones
- Gestion Ambiental PDFDocumento5 páginasGestion Ambiental PDFalejoAún no hay calificaciones
- Religiones EstudiadasDocumento9 páginasReligiones EstudiadasalejoAún no hay calificaciones
- Mi LegadoDocumento3 páginasMi LegadoalejoAún no hay calificaciones
- El Sentido de La Existencia HumanaDocumento6 páginasEl Sentido de La Existencia HumanaalejoAún no hay calificaciones
- Sistema de Suspencion BallestasDocumento7 páginasSistema de Suspencion BallestasalejoAún no hay calificaciones
- El Sentido de La Existencia HumanaDocumento6 páginasEl Sentido de La Existencia HumanaalejoAún no hay calificaciones
- TrapecioDocumento4 páginasTrapecioLucho DamnnAún no hay calificaciones
- Entrega Final Del Proyecto Investigativo.Documento24 páginasEntrega Final Del Proyecto Investigativo.Aporte Simple SASAún no hay calificaciones
- Cuadro Comparativo Nagu 3.10Documento3 páginasCuadro Comparativo Nagu 3.10Angel Santa Maria Rospigliosi100% (4)
- Informe RISKO SAS - Aval Bimensual de La Torre Grúa POTAIN MC 85 Enero 2020Documento8 páginasInforme RISKO SAS - Aval Bimensual de La Torre Grúa POTAIN MC 85 Enero 2020alejandraheventAún no hay calificaciones
- S Sem2 Ses2 MAS PDFDocumento4 páginasS Sem2 Ses2 MAS PDFRocío MartinezAún no hay calificaciones
- Practica 3Documento4 páginasPractica 3lila floresAún no hay calificaciones
- Volcanes de AndaguaDocumento5 páginasVolcanes de AndaguaRf CjulianAún no hay calificaciones
- Análisis Termoestructural de Un Pistón de Motor de Combustión Interna Con Recubrimiento TérmicoDocumento8 páginasAnálisis Termoestructural de Un Pistón de Motor de Combustión Interna Con Recubrimiento Térmicospow123Aún no hay calificaciones
- Estandar Corporativo Trabajos Con Uso de EsmerilDocumento25 páginasEstandar Corporativo Trabajos Con Uso de EsmerilFacu Garcia-SchiavonneAún no hay calificaciones
- Bomba de Infusion Marca: Medcaptain REF: 6010Documento6 páginasBomba de Infusion Marca: Medcaptain REF: 6010Esteban Mantilla idarragaAún no hay calificaciones
- Guia#01 Fuzzy en MatlabDocumento12 páginasGuia#01 Fuzzy en Matlabanderson escarcenaAún no hay calificaciones
- Caracteristicas y Diferencias de Los Diagramas de FaseDocumento2 páginasCaracteristicas y Diferencias de Los Diagramas de FaseJafet OceguedaAún no hay calificaciones
- Configuracion Conversor Giga Etx 203axDocumento11 páginasConfiguracion Conversor Giga Etx 203axMaria Camila ArenasAún no hay calificaciones
- Programa de Investigación Formativa: Título Del Informe EstadísticoDocumento15 páginasPrograma de Investigación Formativa: Título Del Informe EstadísticoESTEFANY PEÑA QUISPEAún no hay calificaciones
- Trabajo Motivacion y EmocionDocumento2 páginasTrabajo Motivacion y EmocionSandra Milena Ubaque LagunaAún no hay calificaciones
- Factura Transporte Comercial Excepto TaxiDocumento1 páginaFactura Transporte Comercial Excepto TaxiJhonatan GrAún no hay calificaciones
- DISCURSODocumento2 páginasDISCURSOjulissaAún no hay calificaciones
- LVHDocumento80 páginasLVHRobert DiazAún no hay calificaciones
- Hoja de Ruta para Incorporar Información Sobre Las Semanas de Gestión PDFDocumento3 páginasHoja de Ruta para Incorporar Información Sobre Las Semanas de Gestión PDF0076MA DirecciónAún no hay calificaciones
- Cuadro ComparativoDocumento5 páginasCuadro ComparativoAntony PinedaAún no hay calificaciones
- Apuntes de Ciudadanía Global - Segundo MóduloDocumento44 páginasApuntes de Ciudadanía Global - Segundo MóduloOMAR GRIJALVA RODRIGUEZAún no hay calificaciones
- Accionamientos EcranDocumento6 páginasAccionamientos EcranYONATHAN LENIN HUACASI LUQUEAún no hay calificaciones
- Evaluacion Epistemologia IDocumento2 páginasEvaluacion Epistemologia IItlhien YeghaAún no hay calificaciones
- ElectroretinogramaDocumento1 páginaElectroretinogramaKaren Guadalupe Hernandez GonzalezAún no hay calificaciones
- Textos para Trabajar ComprensiónDocumento14 páginasTextos para Trabajar ComprensiónELPAPU-HACKER ooAún no hay calificaciones
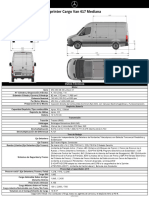
- Sprinter CargoVan 417 Mediana - 90764313-MXFDocumento1 páginaSprinter CargoVan 417 Mediana - 90764313-MXFManuel SalinasAún no hay calificaciones
- De Máquina TérmicaDocumento26 páginasDe Máquina TérmicaJosé Stalin Palacios YungaAún no hay calificaciones
- Kevin Zambrano Tarea 4Documento13 páginasKevin Zambrano Tarea 4Kevin ZambranoAún no hay calificaciones