También podría gustarte
- Ejercicio2 Funcion de TrasferenciaDocumento3 páginasEjercicio2 Funcion de Trasferenciaalexis100% (3)
- Tarea 1Documento10 páginasTarea 1alexisAún no hay calificaciones
- Ficha Registro Instructivo InmuebleDocumento4 páginasFicha Registro Instructivo InmuebleCristian Tuqueres100% (1)
- LaboratorioDocumento8 páginasLaboratorioalexisAún no hay calificaciones
- Ejercicio 2. Teoría de Bandas, Conductividad Eléctrica, Conductores y Semiconductores.Documento3 páginasEjercicio 2. Teoría de Bandas, Conductividad Eléctrica, Conductores y Semiconductores.alexis0% (2)
- Ejercicio Individual 1 y 2Documento3 páginasEjercicio Individual 1 y 2alexisAún no hay calificaciones
- Definición de BitácoraDocumento3 páginasDefinición de Bitácora22021857Aún no hay calificaciones
- Educación Secundaria: Plan de Reforzamiento para El Período Extraordinario de RecuperaciónDocumento359 páginasEducación Secundaria: Plan de Reforzamiento para El Período Extraordinario de RecuperaciónFredy Adolfo García100% (1)
- Manual de Elaboracion Casera de HidromielDocumento6 páginasManual de Elaboracion Casera de HidromielAngelicaAragonesAún no hay calificaciones
- 14 - Sesion Sobre Medidas Preventivas - Desastres NaturalesDocumento12 páginas14 - Sesion Sobre Medidas Preventivas - Desastres NaturalesJoany BerriosAún no hay calificaciones
- Informe SedachimboteDocumento11 páginasInforme SedachimboteCinthia FigueroaAún no hay calificaciones
- Vivienda UnifamiliarDocumento6 páginasVivienda UnifamiliarAntony SanchezAún no hay calificaciones
- Clase 22 Energía I Trabajo y Potencia Mecánica 2015OKDocumento27 páginasClase 22 Energía I Trabajo y Potencia Mecánica 2015OKGuillermo Alfredo Arenas TorresAún no hay calificaciones
- Lenguaje 1º2bDocumento33 páginasLenguaje 1º2bsusan evelyn lopez riosAún no hay calificaciones
- Ejercicios de MoliendaDocumento4 páginasEjercicios de MoliendaFREDY ALEXANDER SANABRIA BARONAún no hay calificaciones
- Tema 1 Informatica Medica IiDocumento46 páginasTema 1 Informatica Medica Iijose luis rodriguezAún no hay calificaciones
- 10 Reglas para Conversar MejorDocumento2 páginas10 Reglas para Conversar MejorVictoria LopezAún no hay calificaciones
- Practica No. 11 Efecto FotoeléctricoDocumento4 páginasPractica No. 11 Efecto FotoeléctricodannaAún no hay calificaciones
- Protocolos HidroterapiaDocumento6 páginasProtocolos HidroterapiaCatalina Arboleda VilladaAún no hay calificaciones
- Banco de SangreDocumento3 páginasBanco de Sangrealexander abad landa suarezAún no hay calificaciones
- 221 1021392397 JulianneCamilaSotoGuzmanDocumento25 páginas221 1021392397 JulianneCamilaSotoGuzmanLISETHAún no hay calificaciones
- P-Op-Go-003mantenimiento Correctivo y PreventivoDocumento8 páginasP-Op-Go-003mantenimiento Correctivo y PreventivoLuis Henry Ruiz ChavezAún no hay calificaciones
- Lab 3 Virtual - Ley de FaradayDocumento5 páginasLab 3 Virtual - Ley de Faradaymagaly urregoAún no hay calificaciones
- ANC. Actas. Vol III. Oct. Nov 1999 PDFDocumento1058 páginasANC. Actas. Vol III. Oct. Nov 1999 PDFRodrigo Moncho StefaniAún no hay calificaciones
- Memoria de Equipamiento Informático, Telecomunicaciones y MobiliarioDocumento34 páginasMemoria de Equipamiento Informático, Telecomunicaciones y MobiliarioNINFOMENSION mix INFOANIMEPELICOMIXAún no hay calificaciones
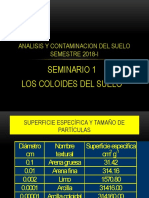
- S1 Coloides Del SueloDocumento25 páginasS1 Coloides Del SueloEduardo Sanchez CarriónAún no hay calificaciones
- Suficientementebueno PDFDocumento4 páginasSuficientementebueno PDFGabriel Deidara SempaiAún no hay calificaciones
- Contrato Vithnar Silva ArosemenaDocumento6 páginasContrato Vithnar Silva ArosemenaMgAún no hay calificaciones
- Flo-Sst-F09-In Formato para Inducción - EntrenamientoDocumento14 páginasFlo-Sst-F09-In Formato para Inducción - EntrenamientoHSEQ FLOPECAún no hay calificaciones
- Revista Conocimiento 52Documento60 páginasRevista Conocimiento 52Revista Conocimiento en línea.Aún no hay calificaciones
- Ifam U2 A2 CLCTDocumento6 páginasIfam U2 A2 CLCTClau CaAún no hay calificaciones
- Sombras de Antepasados OlvidadosDocumento433 páginasSombras de Antepasados OlvidadosGottlieb Leberecht MüllerAún no hay calificaciones
- Anexo 4 - Plantilla Tarea 4 InformeDocumento9 páginasAnexo 4 - Plantilla Tarea 4 InformeYesenia ChicueAún no hay calificaciones
- Diseño de Muros de Contencion Con GeotextilesDocumento80 páginasDiseño de Muros de Contencion Con GeotextilesVanessa Peñaranda71% (7)
- Trastornos AutoinmunitariosDocumento4 páginasTrastornos AutoinmunitariosIsnely MendozaAún no hay calificaciones