También podría gustarte
- Partes Main BoardDocumento8 páginasPartes Main Boardsamir herreraAún no hay calificaciones
- Tareas Del Modulo 2Documento16 páginasTareas Del Modulo 2Santiago Torres100% (1)
- La Guia Definitiva para Escoger OrdenadorDocumento195 páginasLa Guia Definitiva para Escoger OrdenadorCesar Hernan Alvarez ApuelaAún no hay calificaciones
- Evaluación EXAMEN PARCIAL - 2022 - 2Documento6 páginasEvaluación EXAMEN PARCIAL - 2022 - 2Juan ArenasAún no hay calificaciones
- Arquitectura de HarvardDocumento9 páginasArquitectura de HarvardpepeAún no hay calificaciones
- Implementación de API WebDocumento39 páginasImplementación de API WebMartin OjedaAún no hay calificaciones
- Servers SpecDocumento8 páginasServers SpecjhonatanomarAún no hay calificaciones
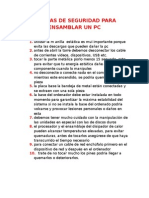
- Normas de Seguridad para Ensamblar Un PCDocumento14 páginasNormas de Seguridad para Ensamblar Un PCJuan Manuel Fabra LozanoAún no hay calificaciones
- Buscador Google - Comandos y Más Trucos - Javier RamosDocumento29 páginasBuscador Google - Comandos y Más Trucos - Javier RamosDaniel Gallardo MoyaAún no hay calificaciones
- Red Hat Enterprise Linux-6-Global File System 2-es-ES PDFDocumento72 páginasRed Hat Enterprise Linux-6-Global File System 2-es-ES PDFFrank J. Silva CasoAún no hay calificaciones
- Administracion Unidad 5 SeguridadDocumento44 páginasAdministracion Unidad 5 SeguridadDaniel Oso MendzAún no hay calificaciones
- Sistemas EmbebidosDocumento31 páginasSistemas EmbebidosgipsikiAún no hay calificaciones
- Apuntes de Sistemas OperativosDocumento92 páginasApuntes de Sistemas OperativosMartín Gonzalez GéneroAún no hay calificaciones
- Unidad N°1 - Unidades Funcionales Del ComputadorDocumento8 páginasUnidad N°1 - Unidades Funcionales Del ComputadorJaime A. Jimenez MartinezAún no hay calificaciones
- PARCIALDocumento39 páginasPARCIALDiego Ponguta CastellanosAún no hay calificaciones
- Componentes Internos de Un Ordenador 1Documento39 páginasComponentes Internos de Un Ordenador 1Javier RubioAún no hay calificaciones
- Cap1 Sist de Información 2022Documento15 páginasCap1 Sist de Información 2022maria isabel quispe apazaAún no hay calificaciones
- Problemas-Cache de ExámenesDocumento13 páginasProblemas-Cache de Exámenesab.Aún no hay calificaciones
- Elementos de Diseño de Un Bus PDFDocumento8 páginasElementos de Diseño de Un Bus PDFWilliam Quimis BarzolaAún no hay calificaciones
- 005-Familia x86Documento15 páginas005-Familia x86Jessy SotoAún no hay calificaciones
- Examen - (AAB01) Cuestionario 2 - Conteste Las Preguntas Del Cuestionario 2 en Línea Referente Al Sistema de Memoria y La CPUDocumento4 páginasExamen - (AAB01) Cuestionario 2 - Conteste Las Preguntas Del Cuestionario 2 en Línea Referente Al Sistema de Memoria y La CPULuis Arley Andrade CuencaAún no hay calificaciones
- Un Sistema Es Un Conjunto de Elementos Relacionados Entre Sí Que Funciona Como Un Todo 5) Tipos de SistemasDocumento6 páginasUn Sistema Es Un Conjunto de Elementos Relacionados Entre Sí Que Funciona Como Un Todo 5) Tipos de Sistemasjoseit 999Aún no hay calificaciones
- Foro AnalíticoDocumento7 páginasForo AnalíticoEsteban PradaAún no hay calificaciones
- Laboratorio Arquitectura de PCDocumento13 páginasLaboratorio Arquitectura de PCEdgard Alberto Ruiz MojicaAún no hay calificaciones
- Monitoreo Tunning PostgresqlDocumento34 páginasMonitoreo Tunning PostgresqlRafaelAún no hay calificaciones
- Mini Guia de Sistemas v1Documento76 páginasMini Guia de Sistemas v1EsmeraldaAún no hay calificaciones
- Cuestionario Sobre Hardware Edwin Nikolay JimenezDocumento15 páginasCuestionario Sobre Hardware Edwin Nikolay JimenezJuan ToledoAún no hay calificaciones
- Implementacion Fisica ComputadorDocumento19 páginasImplementacion Fisica ComputadorElizabeth MishellAún no hay calificaciones
- Administracion Del ProcesadorDocumento4 páginasAdministracion Del ProcesadorVictor Hugo Morales0% (1)
- Ejercicios 1Documento41 páginasEjercicios 1Carlos Leonardo Pérez LizamaAún no hay calificaciones