
FUNCIONES Arduino PDF
FUNCIONES Arduino PDF
También podría gustarte
- Ejemplo de Preguntas de Test de Electrónica DigitalDocumento5 páginasEjemplo de Preguntas de Test de Electrónica Digitalirenetb2000Aún no hay calificaciones
- TALLER PARA MAESTROS DE ESCUELA DOMINICAL. Por Karel GolcherDocumento56 páginasTALLER PARA MAESTROS DE ESCUELA DOMINICAL. Por Karel GolcherArmy100% (1)
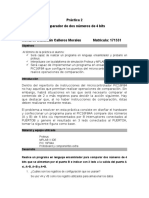
- Práctica-2 Digitales 2Documento4 páginasPráctica-2 Digitales 2Juan MurilloAún no hay calificaciones
- Sensor DispensadorDocumento3 páginasSensor DispensadorMauro Rodriguez0% (1)
- Informe 1 - Funcionamiento Pic16f628aDocumento17 páginasInforme 1 - Funcionamiento Pic16f628aDavid RomeroAún no hay calificaciones
- Practica Arduino Simón DiceDocumento11 páginasPractica Arduino Simón DiceEstebanGuerreroHernandezAún no hay calificaciones
- Mapa Conceptual de Lo Bello y Lo SublimeDocumento1 páginaMapa Conceptual de Lo Bello y Lo SublimeJesy Cortés50% (4)
- Programación Con Arduino - FuncionesDocumento7 páginasProgramación Con Arduino - FuncionesIvon Maritza U GAún no hay calificaciones
- Entrada Eixida Analogica STM32FDocumento20 páginasEntrada Eixida Analogica STM32FandresboliviaAún no hay calificaciones
- ATmega 164p (ESP)Documento378 páginasATmega 164p (ESP)inalac2Aún no hay calificaciones
- Antologia de MicrocontroladoresDocumento128 páginasAntologia de MicrocontroladorestopotopoAún no hay calificaciones
- Arduino FuncionesDocumento16 páginasArduino FuncionesSergio Raul Magaña HernándezAún no hay calificaciones
- Código para Calculadora en ATmega328PDocumento5 páginasCódigo para Calculadora en ATmega328PSebastian Vera MoralesAún no hay calificaciones
- Control in Verna DerosDocumento31 páginasControl in Verna DerosNena ZarateAún no hay calificaciones
- Generando Una Funcion de Onda DeseadaDocumento6 páginasGenerando Una Funcion de Onda DeseadaSteven Alexander Buritica MartinezAún no hay calificaciones
- Guía para Configurar Daq 6008 Como Generador de Señales AnalógicasDocumento9 páginasGuía para Configurar Daq 6008 Como Generador de Señales AnalógicasAndresAún no hay calificaciones
- Onda Senoidal Con ArduinoDocumento5 páginasOnda Senoidal Con ArduinoDuván Ricardo GuzmánAún no hay calificaciones
- Pic 18F4550Documento11 páginasPic 18F4550seykarimAún no hay calificaciones
- DaqDocumento77 páginasDaqLuis FloresAún no hay calificaciones
- Arduino PuertosDocumento7 páginasArduino PuertosGustavoAún no hay calificaciones
- ADC - LCD (PIC18f4550)Documento3 páginasADC - LCD (PIC18f4550)Israel Mendoza VelázquezAún no hay calificaciones
- Programacion Grafica de ArduinoDocumento59 páginasProgramacion Grafica de ArduinoGermán Sánchez100% (1)
- Sensores de Luz (Mikro C)Documento4 páginasSensores de Luz (Mikro C)Memitho Tango UnoAún no hay calificaciones
- ARMDocumento54 páginasARMRonald Wilmer Gomez SegundoAún no hay calificaciones
- Administracion de MemoriaDocumento58 páginasAdministracion de MemoriaDaniel Omar GarciaAún no hay calificaciones
- Secuencia de Leds Con PIC 16f84a y LenguDocumento15 páginasSecuencia de Leds Con PIC 16f84a y LenguZamuel CastilloAún no hay calificaciones
- PIC18F2550 - Comparadores AnalógicosDocumento6 páginasPIC18F2550 - Comparadores AnalógicosLsknho KennyAún no hay calificaciones
- Codigo Tutorial Blynk y Esp8266Documento1 páginaCodigo Tutorial Blynk y Esp8266Ricardo Salamanca EspejoAún no hay calificaciones
- AVR Practica 2 - InterrupcionesDocumento6 páginasAVR Practica 2 - InterrupcionesLiiz SarabiaAún no hay calificaciones
- 7.crear Librerias ArduinoDocumento15 páginas7.crear Librerias Arduinocarlo belliAún no hay calificaciones
- Programador de Pics 16F84 PDFDocumento7 páginasProgramador de Pics 16F84 PDFRaul MonroyAún no hay calificaciones
- Cap13 Red NeuronalDocumento26 páginasCap13 Red Neuronalquisi123Aún no hay calificaciones
- Libro 16F887Documento114 páginasLibro 16F887Angel ToledoAún no hay calificaciones
- ADC Con Pico-BlazeDocumento13 páginasADC Con Pico-BlazeIvan RomoAún no hay calificaciones
- Configuracion de FusesDocumento9 páginasConfiguracion de FusesJuan Pablo Garcia LanderoAún no hay calificaciones
- Arduino Trabajo de InvestigacionDocumento24 páginasArduino Trabajo de InvestigacionalcidesAún no hay calificaciones
- PIC 16F877A Laboratorio 8Documento5 páginasPIC 16F877A Laboratorio 8Alex Daniel GarciaAún no hay calificaciones
- Manual PIC 18F4550-1Documento244 páginasManual PIC 18F4550-1Sandro Julián Panana EspinoAún no hay calificaciones
- Informe Tecnología SATADocumento10 páginasInforme Tecnología SATAdevtapiaAún no hay calificaciones
- Generación de Ondas SPWM Con ArduinoDocumento6 páginasGeneración de Ondas SPWM Con ArduinoYeimir Jiménez0% (1)
- 2 Teoria - Registro de PuertosDocumento4 páginas2 Teoria - Registro de PuertosIvan Andres MuñozAún no hay calificaciones
- Atmega164p EspañolDocumento378 páginasAtmega164p EspañolMarco SolísAún no hay calificaciones
- Construccion de Un Programador de PICsDocumento7 páginasConstruccion de Un Programador de PICsEstebanRojasKrustofsky100% (1)
- ProyectoFinal VLSIDocumento7 páginasProyectoFinal VLSIAdrián PilataxiAún no hay calificaciones
- Presentacion EduardDocumento18 páginasPresentacion EduardCOMANDO986Aún no hay calificaciones
- Evaluacion Continua 1-PDIDocumento7 páginasEvaluacion Continua 1-PDICésar RodríguezAún no hay calificaciones
- Montaje de Una Fuente de Alimentación de LaboratorioDocumento32 páginasMontaje de Una Fuente de Alimentación de LaboratorioHumbertoAún no hay calificaciones
- Manejo de Perifericos para MicrocontroladoreDocumento34 páginasManejo de Perifericos para MicrocontroladorePerensejo Sultanejo100% (1)
- Informe RegistrosDocumento4 páginasInforme RegistrosAlejandraVásquezHernándezAún no hay calificaciones
- Arduino NanoDocumento15 páginasArduino NanoJose Ildefonso Salmoran GarfíasAún no hay calificaciones
- Tablet China AndroidDocumento21 páginasTablet China AndroidRogncxAún no hay calificaciones
- Diagrama Amplificador 1WDocumento1 páginaDiagrama Amplificador 1WDavid Berrio100% (2)
- Practica 5 Wifi Esp32Documento2 páginasPractica 5 Wifi Esp32ANG�LICA JULIETH MADARIAGA GUEVARAAún no hay calificaciones
- Comunicacion Serial Proteus CDocumento15 páginasComunicacion Serial Proteus CPAOLA PADILLAAún no hay calificaciones
- Funciones ArduinoDocumento44 páginasFunciones ArduinoElena MarinescuAún no hay calificaciones
- Arduino UnoDocumento17 páginasArduino UnoErick Villegas TitoAún no hay calificaciones
- Funciones ElementalesDocumento7 páginasFunciones ElementalesSMNeT Soluciones en SistemasAún no hay calificaciones
- Taller ArduinoDocumento28 páginasTaller ArduinoLuis Antonio Mier QuirogaAún no hay calificaciones
- Guía ArduinoDocumento61 páginasGuía ArduinoOmar machuca cruzAún no hay calificaciones
- Entradas y Salidas AnalogasDocumento35 páginasEntradas y Salidas AnalogasTeresa MiAún no hay calificaciones
- Estructura Básica de Un ProgramaDocumento8 páginasEstructura Básica de Un ProgramaArturo Martinez PerezAún no hay calificaciones
- Instituto de Comercio y TecnologiaDocumento8 páginasInstituto de Comercio y TecnologiaKevin CastroAún no hay calificaciones
- Robotica-Motores Reductores DC - PPSXDocumento13 páginasRobotica-Motores Reductores DC - PPSXFrancisco Reyes RaymundoAún no hay calificaciones
- Medidor de Condiciones Ambientales Con ArduinoDocumento3 páginasMedidor de Condiciones Ambientales Con ArduinoFrancisco Reyes RaymundoAún no hay calificaciones
- Demostrando Lo AprendidoDocumento1 páginaDemostrando Lo AprendidoFrancisco Reyes RaymundoAún no hay calificaciones
- Instituto de Educacion Superior Tecnologico Simon BolivarDocumento23 páginasInstituto de Educacion Superior Tecnologico Simon BolivarFrancisco Reyes RaymundoAún no hay calificaciones
- Toe Aula ArregladoDocumento97 páginasToe Aula ArregladoFrancisco Reyes Raymundo100% (1)
- Proyecto IA 2018 01Documento17 páginasProyecto IA 2018 01Francisco Reyes RaymundoAún no hay calificaciones
- Arduino Cap.3 Arte ElectronicoDocumento14 páginasArduino Cap.3 Arte ElectronicoFrancisco Reyes RaymundoAún no hay calificaciones
- Capitulo 2 - Algoritmos - C#Documento17 páginasCapitulo 2 - Algoritmos - C#Francisco Reyes RaymundoAún no hay calificaciones
- Ajitenas TratadoDocumento10 páginasAjitenas TratadoJorge BenitezAún no hay calificaciones
- Taller Comunicación AsertivaDocumento8 páginasTaller Comunicación AsertivaXimena DiazAún no hay calificaciones
- Informe Acerca de La Ética CristianaDocumento3 páginasInforme Acerca de La Ética CristianaGABRIELA BRYGUITTE CRUZ SÁNCHEZAún no hay calificaciones
- Culturas Urbanas de El SalvadorDocumento12 páginasCulturas Urbanas de El SalvadorFERNANDO DIMITRY CLAROS NUÑEZAún no hay calificaciones
- Lamina 11 Recursos de La Narrativa ContemporaneaDocumento2 páginasLamina 11 Recursos de La Narrativa ContemporaneaOriela Andrea Tello Romero100% (1)
- Diapositivas Lectura NiñosDocumento11 páginasDiapositivas Lectura NiñosMarisol Marlene Ventura PurillaAún no hay calificaciones
- Primer GradoDocumento449 páginasPrimer GradoJuan Pablo Perez JaramilloAún no hay calificaciones
- Metodos Numericos Mod 4Documento7 páginasMetodos Numericos Mod 4Jose SuarezAún no hay calificaciones
- La Performance Como Arte y Como Campo Academico-Silvia SitroDocumento7 páginasLa Performance Como Arte y Como Campo Academico-Silvia Sitrolucia vittorelliAún no hay calificaciones
- Asignación #2 Unidad 1Documento3 páginasAsignación #2 Unidad 1Alan CornejoAún no hay calificaciones
- Los Profetas de La Prosperidad Parte 1Documento16 páginasLos Profetas de La Prosperidad Parte 1Zacky Estopier de MoralesAún no hay calificaciones
- Sílabo de Comunicación Interpersonal: Instituto de Educacion Superior Tecnologico Privado "Juanjui"Documento7 páginasSílabo de Comunicación Interpersonal: Instituto de Educacion Superior Tecnologico Privado "Juanjui"IrinaAún no hay calificaciones
- 2019 - Vitale, Lopez Piris Et Al - Estudios - Sobre - Discurso - y - Argumentacion - Trad AngenotDocumento340 páginas2019 - Vitale, Lopez Piris Et Al - Estudios - Sobre - Discurso - y - Argumentacion - Trad AngenotMarianneAún no hay calificaciones
- Guía 8° Estructura y Significado CanciónDocumento3 páginasGuía 8° Estructura y Significado CanciónisidorarensimezaAún no hay calificaciones
- SasDocumento92 páginasSasLuis LuengoAún no hay calificaciones
- INVE.1301.EF - Plan de InvestigaciónDocumento6 páginasINVE.1301.EF - Plan de InvestigaciónSteven Torres BaltodanoAún no hay calificaciones
- Ensayo Sobre La Importancia Del Libro de DanielDocumento4 páginasEnsayo Sobre La Importancia Del Libro de DanielKatherine C. Ordoñez Neyra100% (1)
- Reales 05Documento2 páginasReales 05Granados Bello Jorge FernandoAún no hay calificaciones
- Lab 3 Diseño Dig. - Material de PrácticaDocumento5 páginasLab 3 Diseño Dig. - Material de PrácticaLeonardo CastilloAún no hay calificaciones
- Tarea de Informaticca 1Documento3 páginasTarea de Informaticca 1Yerley Bravo SincelejoAún no hay calificaciones
- Examen Mental en AdolescentesDocumento8 páginasExamen Mental en AdolescentesCamila Rojas0% (1)
- Cuestionario Honey Alonso de Estilos de Aprendizaje en ExcelDocumento21 páginasCuestionario Honey Alonso de Estilos de Aprendizaje en ExcelAndre MenesesAún no hay calificaciones
- Entre Nivel Primario Y Nivel Secundario: Una Propuesta de ArticulaciónDocumento64 páginasEntre Nivel Primario Y Nivel Secundario: Una Propuesta de ArticulaciónClarisa LasalaAún no hay calificaciones
- RefranesDocumento14 páginasRefranesalberto21Aún no hay calificaciones
- Cancionero Caphonuano 2008Documento106 páginasCancionero Caphonuano 2008KATHERIN WENDY ALFARO MEDINAAún no hay calificaciones
- Conceptos Basicos Sobre La Radio y El Guion RadiofonicoDocumento5 páginasConceptos Basicos Sobre La Radio y El Guion RadiofonicocvgrossoAún no hay calificaciones
- Capitulo 9Documento13 páginasCapitulo 9David Callupe ReáteguiAún no hay calificaciones
- Evaluación Final - Electivo IvDocumento3 páginasEvaluación Final - Electivo IvAmarilis ColquepiscoAún no hay calificaciones































































































También podría gustarte
- Ejemplo de Preguntas de Test de Electrónica DigitalDocumento5 páginasEjemplo de Preguntas de Test de Electrónica Digitalirenetb2000Aún no hay calificaciones
- TALLER PARA MAESTROS DE ESCUELA DOMINICAL. Por Karel GolcherDocumento56 páginasTALLER PARA MAESTROS DE ESCUELA DOMINICAL. Por Karel GolcherArmy100% (1)
- Práctica-2 Digitales 2Documento4 páginasPráctica-2 Digitales 2Juan MurilloAún no hay calificaciones
- Sensor DispensadorDocumento3 páginasSensor DispensadorMauro Rodriguez0% (1)
- Informe 1 - Funcionamiento Pic16f628aDocumento17 páginasInforme 1 - Funcionamiento Pic16f628aDavid RomeroAún no hay calificaciones
- Practica Arduino Simón DiceDocumento11 páginasPractica Arduino Simón DiceEstebanGuerreroHernandezAún no hay calificaciones
- Mapa Conceptual de Lo Bello y Lo SublimeDocumento1 páginaMapa Conceptual de Lo Bello y Lo SublimeJesy Cortés50% (4)
- Programación Con Arduino - FuncionesDocumento7 páginasProgramación Con Arduino - FuncionesIvon Maritza U GAún no hay calificaciones
- Entrada Eixida Analogica STM32FDocumento20 páginasEntrada Eixida Analogica STM32FandresboliviaAún no hay calificaciones
- ATmega 164p (ESP)Documento378 páginasATmega 164p (ESP)inalac2Aún no hay calificaciones
- Antologia de MicrocontroladoresDocumento128 páginasAntologia de MicrocontroladorestopotopoAún no hay calificaciones
- Arduino FuncionesDocumento16 páginasArduino FuncionesSergio Raul Magaña HernándezAún no hay calificaciones
- Código para Calculadora en ATmega328PDocumento5 páginasCódigo para Calculadora en ATmega328PSebastian Vera MoralesAún no hay calificaciones
- Control in Verna DerosDocumento31 páginasControl in Verna DerosNena ZarateAún no hay calificaciones
- Generando Una Funcion de Onda DeseadaDocumento6 páginasGenerando Una Funcion de Onda DeseadaSteven Alexander Buritica MartinezAún no hay calificaciones
- Guía para Configurar Daq 6008 Como Generador de Señales AnalógicasDocumento9 páginasGuía para Configurar Daq 6008 Como Generador de Señales AnalógicasAndresAún no hay calificaciones
- Onda Senoidal Con ArduinoDocumento5 páginasOnda Senoidal Con ArduinoDuván Ricardo GuzmánAún no hay calificaciones
- Pic 18F4550Documento11 páginasPic 18F4550seykarimAún no hay calificaciones
- DaqDocumento77 páginasDaqLuis FloresAún no hay calificaciones
- Arduino PuertosDocumento7 páginasArduino PuertosGustavoAún no hay calificaciones
- ADC - LCD (PIC18f4550)Documento3 páginasADC - LCD (PIC18f4550)Israel Mendoza VelázquezAún no hay calificaciones
- Programacion Grafica de ArduinoDocumento59 páginasProgramacion Grafica de ArduinoGermán Sánchez100% (1)
- Sensores de Luz (Mikro C)Documento4 páginasSensores de Luz (Mikro C)Memitho Tango UnoAún no hay calificaciones
- ARMDocumento54 páginasARMRonald Wilmer Gomez SegundoAún no hay calificaciones
- Administracion de MemoriaDocumento58 páginasAdministracion de MemoriaDaniel Omar GarciaAún no hay calificaciones
- Secuencia de Leds Con PIC 16f84a y LenguDocumento15 páginasSecuencia de Leds Con PIC 16f84a y LenguZamuel CastilloAún no hay calificaciones
- PIC18F2550 - Comparadores AnalógicosDocumento6 páginasPIC18F2550 - Comparadores AnalógicosLsknho KennyAún no hay calificaciones
- Codigo Tutorial Blynk y Esp8266Documento1 páginaCodigo Tutorial Blynk y Esp8266Ricardo Salamanca EspejoAún no hay calificaciones
- AVR Practica 2 - InterrupcionesDocumento6 páginasAVR Practica 2 - InterrupcionesLiiz SarabiaAún no hay calificaciones
- 7.crear Librerias ArduinoDocumento15 páginas7.crear Librerias Arduinocarlo belliAún no hay calificaciones
- Programador de Pics 16F84 PDFDocumento7 páginasProgramador de Pics 16F84 PDFRaul MonroyAún no hay calificaciones
- Cap13 Red NeuronalDocumento26 páginasCap13 Red Neuronalquisi123Aún no hay calificaciones
- Libro 16F887Documento114 páginasLibro 16F887Angel ToledoAún no hay calificaciones
- ADC Con Pico-BlazeDocumento13 páginasADC Con Pico-BlazeIvan RomoAún no hay calificaciones
- Configuracion de FusesDocumento9 páginasConfiguracion de FusesJuan Pablo Garcia LanderoAún no hay calificaciones
- Arduino Trabajo de InvestigacionDocumento24 páginasArduino Trabajo de InvestigacionalcidesAún no hay calificaciones
- PIC 16F877A Laboratorio 8Documento5 páginasPIC 16F877A Laboratorio 8Alex Daniel GarciaAún no hay calificaciones
- Manual PIC 18F4550-1Documento244 páginasManual PIC 18F4550-1Sandro Julián Panana EspinoAún no hay calificaciones
- Informe Tecnología SATADocumento10 páginasInforme Tecnología SATAdevtapiaAún no hay calificaciones
- Generación de Ondas SPWM Con ArduinoDocumento6 páginasGeneración de Ondas SPWM Con ArduinoYeimir Jiménez0% (1)
- 2 Teoria - Registro de PuertosDocumento4 páginas2 Teoria - Registro de PuertosIvan Andres MuñozAún no hay calificaciones
- Atmega164p EspañolDocumento378 páginasAtmega164p EspañolMarco SolísAún no hay calificaciones
- Construccion de Un Programador de PICsDocumento7 páginasConstruccion de Un Programador de PICsEstebanRojasKrustofsky100% (1)
- ProyectoFinal VLSIDocumento7 páginasProyectoFinal VLSIAdrián PilataxiAún no hay calificaciones
- Presentacion EduardDocumento18 páginasPresentacion EduardCOMANDO986Aún no hay calificaciones
- Evaluacion Continua 1-PDIDocumento7 páginasEvaluacion Continua 1-PDICésar RodríguezAún no hay calificaciones
- Montaje de Una Fuente de Alimentación de LaboratorioDocumento32 páginasMontaje de Una Fuente de Alimentación de LaboratorioHumbertoAún no hay calificaciones
- Manejo de Perifericos para MicrocontroladoreDocumento34 páginasManejo de Perifericos para MicrocontroladorePerensejo Sultanejo100% (1)
- Informe RegistrosDocumento4 páginasInforme RegistrosAlejandraVásquezHernándezAún no hay calificaciones
- Arduino NanoDocumento15 páginasArduino NanoJose Ildefonso Salmoran GarfíasAún no hay calificaciones
- Tablet China AndroidDocumento21 páginasTablet China AndroidRogncxAún no hay calificaciones
- Diagrama Amplificador 1WDocumento1 páginaDiagrama Amplificador 1WDavid Berrio100% (2)
- Practica 5 Wifi Esp32Documento2 páginasPractica 5 Wifi Esp32ANG�LICA JULIETH MADARIAGA GUEVARAAún no hay calificaciones
- Comunicacion Serial Proteus CDocumento15 páginasComunicacion Serial Proteus CPAOLA PADILLAAún no hay calificaciones
- Funciones ArduinoDocumento44 páginasFunciones ArduinoElena MarinescuAún no hay calificaciones
- Arduino UnoDocumento17 páginasArduino UnoErick Villegas TitoAún no hay calificaciones
- Funciones ElementalesDocumento7 páginasFunciones ElementalesSMNeT Soluciones en SistemasAún no hay calificaciones
- Taller ArduinoDocumento28 páginasTaller ArduinoLuis Antonio Mier QuirogaAún no hay calificaciones
- Guía ArduinoDocumento61 páginasGuía ArduinoOmar machuca cruzAún no hay calificaciones
- Entradas y Salidas AnalogasDocumento35 páginasEntradas y Salidas AnalogasTeresa MiAún no hay calificaciones
- Estructura Básica de Un ProgramaDocumento8 páginasEstructura Básica de Un ProgramaArturo Martinez PerezAún no hay calificaciones
- Instituto de Comercio y TecnologiaDocumento8 páginasInstituto de Comercio y TecnologiaKevin CastroAún no hay calificaciones
- Robotica-Motores Reductores DC - PPSXDocumento13 páginasRobotica-Motores Reductores DC - PPSXFrancisco Reyes RaymundoAún no hay calificaciones
- Medidor de Condiciones Ambientales Con ArduinoDocumento3 páginasMedidor de Condiciones Ambientales Con ArduinoFrancisco Reyes RaymundoAún no hay calificaciones
- Demostrando Lo AprendidoDocumento1 páginaDemostrando Lo AprendidoFrancisco Reyes RaymundoAún no hay calificaciones
- Instituto de Educacion Superior Tecnologico Simon BolivarDocumento23 páginasInstituto de Educacion Superior Tecnologico Simon BolivarFrancisco Reyes RaymundoAún no hay calificaciones
- Toe Aula ArregladoDocumento97 páginasToe Aula ArregladoFrancisco Reyes Raymundo100% (1)
- Proyecto IA 2018 01Documento17 páginasProyecto IA 2018 01Francisco Reyes RaymundoAún no hay calificaciones
- Arduino Cap.3 Arte ElectronicoDocumento14 páginasArduino Cap.3 Arte ElectronicoFrancisco Reyes RaymundoAún no hay calificaciones
- Capitulo 2 - Algoritmos - C#Documento17 páginasCapitulo 2 - Algoritmos - C#Francisco Reyes RaymundoAún no hay calificaciones
- Ajitenas TratadoDocumento10 páginasAjitenas TratadoJorge BenitezAún no hay calificaciones
- Taller Comunicación AsertivaDocumento8 páginasTaller Comunicación AsertivaXimena DiazAún no hay calificaciones
- Informe Acerca de La Ética CristianaDocumento3 páginasInforme Acerca de La Ética CristianaGABRIELA BRYGUITTE CRUZ SÁNCHEZAún no hay calificaciones
- Culturas Urbanas de El SalvadorDocumento12 páginasCulturas Urbanas de El SalvadorFERNANDO DIMITRY CLAROS NUÑEZAún no hay calificaciones
- Lamina 11 Recursos de La Narrativa ContemporaneaDocumento2 páginasLamina 11 Recursos de La Narrativa ContemporaneaOriela Andrea Tello Romero100% (1)
- Diapositivas Lectura NiñosDocumento11 páginasDiapositivas Lectura NiñosMarisol Marlene Ventura PurillaAún no hay calificaciones
- Primer GradoDocumento449 páginasPrimer GradoJuan Pablo Perez JaramilloAún no hay calificaciones
- Metodos Numericos Mod 4Documento7 páginasMetodos Numericos Mod 4Jose SuarezAún no hay calificaciones
- La Performance Como Arte y Como Campo Academico-Silvia SitroDocumento7 páginasLa Performance Como Arte y Como Campo Academico-Silvia Sitrolucia vittorelliAún no hay calificaciones
- Asignación #2 Unidad 1Documento3 páginasAsignación #2 Unidad 1Alan CornejoAún no hay calificaciones
- Los Profetas de La Prosperidad Parte 1Documento16 páginasLos Profetas de La Prosperidad Parte 1Zacky Estopier de MoralesAún no hay calificaciones
- Sílabo de Comunicación Interpersonal: Instituto de Educacion Superior Tecnologico Privado "Juanjui"Documento7 páginasSílabo de Comunicación Interpersonal: Instituto de Educacion Superior Tecnologico Privado "Juanjui"IrinaAún no hay calificaciones
- 2019 - Vitale, Lopez Piris Et Al - Estudios - Sobre - Discurso - y - Argumentacion - Trad AngenotDocumento340 páginas2019 - Vitale, Lopez Piris Et Al - Estudios - Sobre - Discurso - y - Argumentacion - Trad AngenotMarianneAún no hay calificaciones
- Guía 8° Estructura y Significado CanciónDocumento3 páginasGuía 8° Estructura y Significado CanciónisidorarensimezaAún no hay calificaciones
- SasDocumento92 páginasSasLuis LuengoAún no hay calificaciones
- INVE.1301.EF - Plan de InvestigaciónDocumento6 páginasINVE.1301.EF - Plan de InvestigaciónSteven Torres BaltodanoAún no hay calificaciones
- Ensayo Sobre La Importancia Del Libro de DanielDocumento4 páginasEnsayo Sobre La Importancia Del Libro de DanielKatherine C. Ordoñez Neyra100% (1)
- Reales 05Documento2 páginasReales 05Granados Bello Jorge FernandoAún no hay calificaciones
- Lab 3 Diseño Dig. - Material de PrácticaDocumento5 páginasLab 3 Diseño Dig. - Material de PrácticaLeonardo CastilloAún no hay calificaciones
- Tarea de Informaticca 1Documento3 páginasTarea de Informaticca 1Yerley Bravo SincelejoAún no hay calificaciones
- Examen Mental en AdolescentesDocumento8 páginasExamen Mental en AdolescentesCamila Rojas0% (1)
- Cuestionario Honey Alonso de Estilos de Aprendizaje en ExcelDocumento21 páginasCuestionario Honey Alonso de Estilos de Aprendizaje en ExcelAndre MenesesAún no hay calificaciones
- Entre Nivel Primario Y Nivel Secundario: Una Propuesta de ArticulaciónDocumento64 páginasEntre Nivel Primario Y Nivel Secundario: Una Propuesta de ArticulaciónClarisa LasalaAún no hay calificaciones
- RefranesDocumento14 páginasRefranesalberto21Aún no hay calificaciones
- Cancionero Caphonuano 2008Documento106 páginasCancionero Caphonuano 2008KATHERIN WENDY ALFARO MEDINAAún no hay calificaciones
- Conceptos Basicos Sobre La Radio y El Guion RadiofonicoDocumento5 páginasConceptos Basicos Sobre La Radio y El Guion RadiofonicocvgrossoAún no hay calificaciones
- Capitulo 9Documento13 páginasCapitulo 9David Callupe ReáteguiAún no hay calificaciones
- Evaluación Final - Electivo IvDocumento3 páginasEvaluación Final - Electivo IvAmarilis ColquepiscoAún no hay calificaciones