También podría gustarte
- ControlPWM_EQEP_ADCDocumento7 páginasControlPWM_EQEP_ADCRenato OviedoAún no hay calificaciones
- AAaDocumento26 páginasAAaHarol Taysú Taboada MartinezAún no hay calificaciones
- DSPDocumento17 páginasDSPAlberto Mamani QuintoAún no hay calificaciones
- DSP 1Documento18 páginasDSP 1Renato OviedoAún no hay calificaciones
- PC4 LaboratorioDocumento10 páginasPC4 LaboratorioEdgar Andres Cevallos RamirezAún no hay calificaciones
- Laboratorios CodigosDocumento9 páginasLaboratorios CodigosDavid RochaAún no hay calificaciones
- Control PID Código C Compilador CCSDocumento3 páginasControl PID Código C Compilador CCSemely jose sumoza figueredoAún no hay calificaciones
- 2023 ProgramasDocumento8 páginas2023 ProgramasNéstor Galeano ArenasAún no hay calificaciones
- Control Pid Con Lm35 para ArduinoDocumento6 páginasControl Pid Con Lm35 para ArduinoJuan Navarrete GuzmanAún no hay calificaciones
- Programación para ServomotorDocumento2 páginasProgramación para Servomotor121041239Aún no hay calificaciones
- Código Del Proyecto - Pic C CompilerDocumento5 páginasCódigo Del Proyecto - Pic C CompilerChristian Waldir Machaca MoscairaAún no hay calificaciones
- Modulo PWMDocumento6 páginasModulo PWMpedro_aguilar_43Aún no hay calificaciones
- Implementacion de Pid Con Atmega8Documento7 páginasImplementacion de Pid Con Atmega8Milo VanvanAún no hay calificaciones
- Motor-PID Con PicsDocumento9 páginasMotor-PID Con PicsFabian Hernandez AguilarAún no hay calificaciones
- Examen Parcial Procesadores Digitales de SeñalesDocumento6 páginasExamen Parcial Procesadores Digitales de SeñalesArturo CMAún no hay calificaciones
- Codigo PROYECTO4Documento9 páginasCodigo PROYECTO4Heraldo FortunaAún no hay calificaciones
- Pid PDFDocumento3 páginasPid PDFccovaAún no hay calificaciones
- PC4 LaboratorioDocumento7 páginasPC4 LaboratorioEdgar Andres Cevallos RamirezAún no hay calificaciones
- CTRL ArduinoDocumento13 páginasCTRL Arduinogilbert velascoAún no hay calificaciones
- Examen Final Prog Digital-2023-IDocumento10 páginasExamen Final Prog Digital-2023-ILazloAún no hay calificaciones
- Configuración ADC DSP2833xDocumento1 páginaConfiguración ADC DSP2833xronnyAún no hay calificaciones
- PWM_10%_TIMER1Documento3 páginasPWM_10%_TIMER1Luis Arturo Dan FongAún no hay calificaciones
- PWM en Mpalb Xc8 Con Teclado MatricialDocumento15 páginasPWM en Mpalb Xc8 Con Teclado Matricialjesus chavezAún no hay calificaciones
- Informe Final Laboratorio 2 MicroDocumento7 páginasInforme Final Laboratorio 2 MicroJosue Marcelo ChavarriaAún no hay calificaciones
- Medir Velocidad Con EncoderDocumento10 páginasMedir Velocidad Con EncoderbgodinezcAún no hay calificaciones
- Programas C2000Documento27 páginasProgramas C2000sheshomaruAún no hay calificaciones
- CodigosDocumento2 páginasCodigosGabiie ReyesAún no hay calificaciones
- TimerDocumento8 páginasTimerJop MiloAún no hay calificaciones
- Prueba T3Documento2 páginasPrueba T3Fati EspindolaAún no hay calificaciones
- Práctica de EmbebidosDocumento8 páginasPráctica de EmbebidosJosueAún no hay calificaciones
- Timer Initialization For JM60Documento2 páginasTimer Initialization For JM60zhenronAún no hay calificaciones
- Ejemplos de Programación Con PicDocumento42 páginasEjemplos de Programación Con PicFernando GasparAún no hay calificaciones
- Codigos Base Burst Desarrollo MagnetoDocumento3 páginasCodigos Base Burst Desarrollo MagnetoAdriana KomykAún no hay calificaciones
- Micro - LAB03-COMPLETODocumento57 páginasMicro - LAB03-COMPLETOantoniAún no hay calificaciones
- KL27 GPIO e IRQDocumento9 páginasKL27 GPIO e IRQdavidt1516Aún no hay calificaciones
- Paso 6 CesarDocumento13 páginasPaso 6 CesarSantiago BarónAún no hay calificaciones
- Config PIC16F84 TempDocumento7 páginasConfig PIC16F84 Tempivantm15Aún no hay calificaciones
- PDF Control de Velocidad de Un Motor DC Con Pic - CompressDocumento15 páginasPDF Control de Velocidad de Un Motor DC Con Pic - CompressJonathan Jimenez JardonAún no hay calificaciones
- PWM y temporizadores PIC18F4550Documento7 páginasPWM y temporizadores PIC18F4550gabyguilloAún no hay calificaciones
- PDF Control de Velocidad de Un Motor DC Con Pic - CompressDocumento15 páginasPDF Control de Velocidad de Un Motor DC Con Pic - CompressJonathan Jimenez JardonAún no hay calificaciones
- Lab N3Documento3 páginasLab N3Nico PerezAún no hay calificaciones
- MICROCONTROLADORES Y SISTEMAS EMBEBIDOS - LECTURA DE SENSORES Y TRANSMISIÓN DE DATOS POR UARTDocumento4 páginasMICROCONTROLADORES Y SISTEMAS EMBEBIDOS - LECTURA DE SENSORES Y TRANSMISIÓN DE DATOS POR UARTDaniel Quesada BejaranoAún no hay calificaciones
- Trabajo AcademicoDocumento23 páginasTrabajo AcademicoEDSSON ALEXANDER ALBAN ATOCHEAún no hay calificaciones
- Pre Informe - ADCDocumento9 páginasPre Informe - ADCNapo NapoAún no hay calificaciones
- Sensor CO2Documento7 páginasSensor CO2Julian Rodolfo Pérez KnulstAún no hay calificaciones
- AtenuadoresDocumento2 páginasAtenuadoresLuis Antonio PérezAún no hay calificaciones
- Temp InterrupcionesDocumento1 páginaTemp InterrupcionesDulceAún no hay calificaciones
- Main Ejercicio 5Documento5 páginasMain Ejercicio 5JUAN CARLOS CAMPOS RAMIREZAún no hay calificaciones
- Control de Temperatura Con PWN Usando PICDocumento14 páginasControl de Temperatura Con PWN Usando PICPamela Rodriguez RodriguezAún no hay calificaciones
- Micro CDocumento16 páginasMicro Cramirex_umsaAún no hay calificaciones
- Funciones para El Control Del Motor y de Barrido Con Registros PWMDocumento7 páginasFunciones para El Control Del Motor y de Barrido Con Registros PWMDeybi RamirezAún no hay calificaciones
- ADC - LCD (PIC18f4550)Documento3 páginasADC - LCD (PIC18f4550)Israel Mendoza VelázquezAún no hay calificaciones
- PWM en MSP430G2553: Configuración y generación de señal PWMDocumento5 páginasPWM en MSP430G2553: Configuración y generación de señal PWMPoliester Tejas CuadrosAún no hay calificaciones
- Codigo Integracion PastilleroDocumento6 páginasCodigo Integracion PastilleroDiego Fernando SalamancaAún no hay calificaciones
- Practica Calificada 02 - Grupo 1Documento15 páginasPractica Calificada 02 - Grupo 1Carlos MoreAún no hay calificaciones
- Diseño de termómetro clínicoDocumento21 páginasDiseño de termómetro clínicoSoretroath CutAún no hay calificaciones
- ArrutiSanchez 3CM14 P11Documento8 páginasArrutiSanchez 3CM14 P11Miranda Pardo AngelAún no hay calificaciones
- Manual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)De EverandManual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)Calificación: 2 de 5 estrellas2/5 (1)
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaDe EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaAún no hay calificaciones
- Puesta en marcha y regulación de instalaciones de climatización y ventilación-extracción. IMAR0208De EverandPuesta en marcha y regulación de instalaciones de climatización y ventilación-extracción. IMAR0208Aún no hay calificaciones
- Soporte - ProcesadorDocumento8 páginasSoporte - Procesadoryamile diazAún no hay calificaciones
- SOL - EXAMEN Tecnologías 1º ESO 1 EvaluaciónDocumento2 páginasSOL - EXAMEN Tecnologías 1º ESO 1 EvaluaciónAnonymous yxcFcgJmk100% (4)
- Manual Basico de Microcontroladores PicDocumento68 páginasManual Basico de Microcontroladores PicCarls Guiovani Guirrardelli VegaAún no hay calificaciones
- 1er. Laboratorio 5to Compu 2018Documento13 páginas1er. Laboratorio 5to Compu 2018ckdkgvfdkgAún no hay calificaciones
- VSATDocumento6 páginasVSATFelipe CapchaAún no hay calificaciones
- Filtros ArmonicosDocumento5 páginasFiltros ArmonicosNicolas Rojo100% (1)
- Tester Probador de Fuentes de PCDocumento4 páginasTester Probador de Fuentes de PCAlexander NavaAún no hay calificaciones
- Lab 03 EtropoDocumento9 páginasLab 03 EtropoDiego A CruzAún no hay calificaciones
- Lista de Sites Actualizado PAPDocumento1071 páginasLista de Sites Actualizado PAPMoisesAún no hay calificaciones
- Circuito Cargador Solar 12VDocumento5 páginasCircuito Cargador Solar 12VProspero Araya FuentesAún no hay calificaciones
- Actividad Fundamental 1Documento5 páginasActividad Fundamental 1René AlejandroAún no hay calificaciones
- 1.2 El Procesador y Sus Registros InternosDocumento18 páginas1.2 El Procesador y Sus Registros InternosFrank Diaz100% (1)
- Aplificadores de Potencia Tema (5)Documento26 páginasAplificadores de Potencia Tema (5)Sumano AbrahamAún no hay calificaciones
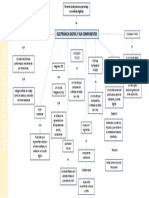
- Mapa Conceptual Electrónica Digital y Sus ComponentesDocumento1 páginaMapa Conceptual Electrónica Digital y Sus ComponentesBeatrizAún no hay calificaciones
- Introducción a las antenas y sus características fundamentalesDocumento12 páginasIntroducción a las antenas y sus características fundamentalesSiranuchAún no hay calificaciones
- El AutotransformadorDocumento28 páginasEl Autotransformadormamani mamani paulAún no hay calificaciones
- CPLDDocumento27 páginasCPLDKevin Maldonado100% (1)
- Amplificador - Nexo NX242Documento38 páginasAmplificador - Nexo NX242Luis Daga AlvaAún no hay calificaciones
- Hardware y SoftwareDocumento8 páginasHardware y SoftwareKarol RiveraAún no hay calificaciones
- Practica Modulación AMDocumento8 páginasPractica Modulación AMAlfredo MorenoAún no hay calificaciones
- Sistemas Satelitales - 01Documento51 páginasSistemas Satelitales - 01HaroldAlvarezChaucaAún no hay calificaciones
- Trabajo OsciladoresDocumento28 páginasTrabajo OsciladoresPaul Kevin Rengifo SandovalAún no hay calificaciones
- Informe 1 INTRODUCCION A LA ELECTRONICA DIGITALDocumento4 páginasInforme 1 INTRODUCCION A LA ELECTRONICA DIGITALAlex AJ50% (2)
- S07 - Conversor AC-ACDocumento35 páginasS07 - Conversor AC-ACAlejandra RoqueAún no hay calificaciones
- Tema 3. Transistores de Union Bipolar BJTDocumento29 páginasTema 3. Transistores de Union Bipolar BJTChristian deluquezAún no hay calificaciones
- Cuestionarios ComunicacionesDocumento40 páginasCuestionarios ComunicacionesKarlita SanchezAún no hay calificaciones
- Lab #8 Electronicos 1Documento8 páginasLab #8 Electronicos 1Christian CappilloAún no hay calificaciones
- IEEE ElectronicaDocumento13 páginasIEEE ElectronicaAndrés MayorgaAún no hay calificaciones
- APU Banco de PruebasDocumento2 páginasAPU Banco de PruebasJesús AlfredoAún no hay calificaciones
- 8558 Lab P1 1 Rivera Esteban InformeDocumento16 páginas8558 Lab P1 1 Rivera Esteban InformeEsteban RiveraAún no hay calificaciones