También podría gustarte
- Anualidades CompletoDocumento47 páginasAnualidades CompletoYean Guere LavadoAún no hay calificaciones
- BiogasDocumento10 páginasBiogasRuth RisseliAún no hay calificaciones
- Caja de Pagos CompletoDocumento34 páginasCaja de Pagos CompletoYean Guere LavadoAún no hay calificaciones
- BiogasDocumento10 páginasBiogasRuth RisseliAún no hay calificaciones
- Caja de Pagos CompletoDocumento34 páginasCaja de Pagos CompletoYean Guere LavadoAún no hay calificaciones
- Prototipo de Baño SecoDocumento149 páginasPrototipo de Baño SecoYean Guere LavadoAún no hay calificaciones
- MatrizDocumento2 páginasMatrizYean Guere LavadoAún no hay calificaciones
- Anualidades CompletoDocumento47 páginasAnualidades CompletoYean Guere LavadoAún no hay calificaciones
- Final 1Documento6 páginasFinal 1Yean Guere LavadoAún no hay calificaciones
- Trabpr 6 TDocumento17 páginasTrabpr 6 TYean Guere LavadoAún no hay calificaciones
- Tarea 6 MmicrolectronicaDocumento17 páginasTarea 6 MmicrolectronicaYean Guere LavadoAún no hay calificaciones
- MatrizDocumento2 páginasMatrizYean Guere LavadoAún no hay calificaciones
- Teoria 4Documento5 páginasTeoria 4Yean Guere LavadoAún no hay calificaciones
- TRABAJO3Documento9 páginasTRABAJO3Yean Guere LavadoAún no hay calificaciones
- Proceso de FabricaciónDocumento4 páginasProceso de FabricaciónYean Guere LavadoAún no hay calificaciones
- Informe 4Documento13 páginasInforme 4Yean Guere LavadoAún no hay calificaciones
- Adaptación de DipolosDocumento5 páginasAdaptación de DipolosYean Guere LavadoAún no hay calificaciones
- Traba 5 FDocumento10 páginasTraba 5 FYean Guere LavadoAún no hay calificaciones
- LAB4Documento19 páginasLAB4Yean Guere LavadoAún no hay calificaciones
- Informe 5Documento12 páginasInforme 5Yean Guere LavadoAún no hay calificaciones
- Informe 1Documento11 páginasInforme 1Yean Guere LavadoAún no hay calificaciones
- Informe 3Documento15 páginasInforme 3Yean Guere LavadoAún no hay calificaciones
- Informe 2Documento8 páginasInforme 2Yean Guere LavadoAún no hay calificaciones
- EC-2322 Guías de Onda PDFDocumento17 páginasEC-2322 Guías de Onda PDFYean Guere LavadoAún no hay calificaciones
- Informe 1Documento11 páginasInforme 1Yean Guere LavadoAún no hay calificaciones
- Trabajo para HuarotoDocumento3 páginasTrabajo para HuarotoScott Cristobal IngarucaAún no hay calificaciones
- EC-2322 Guías de Onda Rectangulares PDFDocumento23 páginasEC-2322 Guías de Onda Rectangulares PDFYean Guere LavadoAún no hay calificaciones
- Ventajas y DesventajasDocumento8 páginasVentajas y DesventajasYean Guere LavadoAún no hay calificaciones
- Ventajas y DesventajasDocumento8 páginasVentajas y DesventajasYean Guere LavadoAún no hay calificaciones
- Lenguaje Formal e Informal - VenelogíaDocumento4 páginasLenguaje Formal e Informal - VenelogíaCusifainAún no hay calificaciones
- InvestigaciónDocumento11 páginasInvestigaciónGlo RAún no hay calificaciones
- Arquitectura de Un PLCDocumento4 páginasArquitectura de Un PLCDîon D. OviedoAún no hay calificaciones
- Modelo SPEAKING y Elementos de La Comunicación.Documento10 páginasModelo SPEAKING y Elementos de La Comunicación.Sthefany VargasAún no hay calificaciones
- Modelo para La Creación de Entornos de Aprendizaje Basados en Técnicas de Gestión Del ConocimientoDocumento12 páginasModelo para La Creación de Entornos de Aprendizaje Basados en Técnicas de Gestión Del ConocimientoJhoel Flores LimachiAún no hay calificaciones
- Leyendas Bosque Seco EcuatorialDocumento23 páginasLeyendas Bosque Seco EcuatorialAbdias GCAún no hay calificaciones
- MemoriasDocumento2 páginasMemoriasamex4152Aún no hay calificaciones
- Manual Libreoffice ImpressDocumento17 páginasManual Libreoffice ImpressRossi CharpentierAún no hay calificaciones
- Operador TernarioDocumento2 páginasOperador TernarioChucho FrancoAún no hay calificaciones
- Transformacion de Coordenadas UTM PSAD56 A WGS84Documento8 páginasTransformacion de Coordenadas UTM PSAD56 A WGS84armandolibrosAún no hay calificaciones
- Curso CodespDocumento3 páginasCurso CodespEder CanchiAún no hay calificaciones
- A258 A259 Span SMDocumento576 páginasA258 A259 Span SMesecasiAún no hay calificaciones
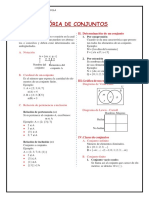
- CONUNTODocumento2 páginasCONUNTOSami MaqueraAún no hay calificaciones
- Servomotor. Introducción y EjemplosDocumento3 páginasServomotor. Introducción y EjemplosjbrunobAún no hay calificaciones
- Recipiente A Presion (Ansys Clasical)Documento17 páginasRecipiente A Presion (Ansys Clasical)camaleon2603Aún no hay calificaciones
- Guia Install Gisin3Documento14 páginasGuia Install Gisin3Jesus PatiñoAún no hay calificaciones
- CM Pert Red BullDocumento7 páginasCM Pert Red BullbetoAún no hay calificaciones
- Vista 50PDocumento41 páginasVista 50PArmando Maldonado100% (1)
- 007 Prueba Del SignoDocumento14 páginas007 Prueba Del SignoAmador PensadorAún no hay calificaciones
- Paso 2 Yofre BonillaDocumento13 páginasPaso 2 Yofre BonillaDuvan Camilo Vargas CelyAún no hay calificaciones
- Tipos de PlanesDocumento6 páginasTipos de PlanesMarco Alexander Perez0% (1)
- Taxonomia de BloomDocumento2 páginasTaxonomia de BloomBelen SCAún no hay calificaciones
- Unidad 3: MRPDocumento6 páginasUnidad 3: MRPlupisAún no hay calificaciones
- Actividad 1Documento5 páginasActividad 1Sebastian CunemeAún no hay calificaciones
- NormalizacionDocumento71 páginasNormalizacionOrlando Choque AAún no hay calificaciones
- Manual de Usuario FormatoDocumento11 páginasManual de Usuario FormatoJosé Antonio Martel AbdalaAún no hay calificaciones
- Plataformas Educativas Software Libre y PropietarioDocumento3 páginasPlataformas Educativas Software Libre y PropietarioMiguel ObregonAún no hay calificaciones
- Formato - Perfil de Cargo Tecnico en MantenimientoDocumento5 páginasFormato - Perfil de Cargo Tecnico en MantenimientoAngelica MartinezAún no hay calificaciones
- Tarea 1 SD14 PDFDocumento1 páginaTarea 1 SD14 PDFDANU45364Aún no hay calificaciones
- Contador Binario 4 BitsDocumento4 páginasContador Binario 4 Bitsedry_12125707100% (1)