También podría gustarte
- Codigo Arduino CarroDocumento3 páginasCodigo Arduino CarroLUIS RAYMUNDO GARCIA CALDERONAún no hay calificaciones
- SHD CDocumento10 páginasSHD CJHOSYMAR CORTES RODRIGUEZAún no hay calificaciones
- ArduinoDocumento6 páginasArduinoantonioAún no hay calificaciones
- Diagramas ArduinoDocumento15 páginasDiagramas ArduinoJorge Santiago Cartagena RosalesAún no hay calificaciones
- CODIGO Modelo de Peaje Con Ultrasonico y ServomotorDocumento1 páginaCODIGO Modelo de Peaje Con Ultrasonico y ServomotorCrizz Cardenas0% (2)
- MC CP2B 1 5eeDocumento2 páginasMC CP2B 1 5eeYukary AlarconAún no hay calificaciones
- Piedra Papel o Tijera Arduino-1Documento4 páginasPiedra Papel o Tijera Arduino-1daniel zambrana tejerinaAún no hay calificaciones
- Parcial Circuitos Digitales Corte 2Documento14 páginasParcial Circuitos Digitales Corte 2DavidAún no hay calificaciones
- Ejemplo BàsicoDocumento8 páginasEjemplo BàsicoJosé RomeroAún no hay calificaciones
- Informe Laboratorio 1Documento18 páginasInforme Laboratorio 1Jorge Luis Condori Tallacagua75% (4)
- ARDUINO 1 y 2 Victor LópezDocumento17 páginasARDUINO 1 y 2 Victor LópezVictor LopezAún no hay calificaciones
- P, P, TDocumento3 páginasP, P, TKoyi KabutoAún no hay calificaciones
- Código InvernaderoDocumento4 páginasCódigo InvernaderoJhonattan JavierAún no hay calificaciones
- Arduino Control Car V2 byDocumento7 páginasArduino Control Car V2 byedithAún no hay calificaciones
- ArduinoISP Versión 04m3Documento15 páginasArduinoISP Versión 04m3juan carlos muñoz camposAún no hay calificaciones
- Domótica Con Microcontroladores - 1819Documento12 páginasDomótica Con Microcontroladores - 1819epicseventryAún no hay calificaciones
- Alter Informe Lote 11Documento4 páginasAlter Informe Lote 11Chistian SanchezAún no hay calificaciones
- Parpadeo y Secuencia de LedDocumento16 páginasParpadeo y Secuencia de LedBell BonAún no hay calificaciones
- Program, A Display 7 Segmentos CaseroDocumento8 páginasProgram, A Display 7 Segmentos Caserohelmer ruizAún no hay calificaciones
- CompuertasDocumento12 páginasCompuertasPepe SanchezAún no hay calificaciones
- Unit2 Akhmad Musthofa Munir 40040319650022Documento7 páginasUnit2 Akhmad Musthofa Munir 40040319650022Akhmad MusthofaAún no hay calificaciones
- Examen MicroDocumento14 páginasExamen MicroElias Morales RosasAún no hay calificaciones
- E/S Digital: Pinmode (Pin, Mode)Documento7 páginasE/S Digital: Pinmode (Pin, Mode)banzorro9029Aún no hay calificaciones
- Sistema de Seguridad - HexDocumento2 páginasSistema de Seguridad - HexAndres Sebastian Ardila MarinAún no hay calificaciones
- Programa 1Documento4 páginasPrograma 1LUIS ENRIQUE MENA MENAAún no hay calificaciones
- Encubadora de Huevos Automatica Temperatura y HumedadDocumento4 páginasEncubadora de Huevos Automatica Temperatura y HumedadJuan Francisco Gordillo BezaresAún no hay calificaciones
- CÓDIGO DISPENSADOR DE JABÓN - Ana Karen Mendoza HernandezDocumento2 páginasCÓDIGO DISPENSADOR DE JABÓN - Ana Karen Mendoza HernandezFrancisco EmilioAún no hay calificaciones
- Laberinto CuadradoDocumento4 páginasLaberinto CuadradoPaco SanzAún no hay calificaciones
- Ejerciciosdearduinoresueltos 140806115433 Phpapp02 PDFDocumento31 páginasEjerciciosdearduinoresueltos 140806115433 Phpapp02 PDFcarlagfloresAún no hay calificaciones
- Programas ArduinoDocumento15 páginasProgramas ArduinoDaniel Tenezaca BejaranoAún no hay calificaciones
- Deber 9 Sistemas MicroprocesadosDocumento3 páginasDeber 9 Sistemas Microprocesadosxavier2ramos-1Aún no hay calificaciones
- Vehiculo AutónomoDocumento4 páginasVehiculo AutónomoenriqueAún no hay calificaciones
- Practica 6 CodigoDocumento2 páginasPractica 6 CodigoJaneAún no hay calificaciones
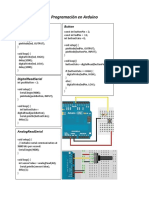
- Programación en ArduinoDocumento34 páginasProgramación en ArduinoJohn Morillo100% (1)
- Informe Previo 7 Soto HenryDocumento6 páginasInforme Previo 7 Soto HenrySantiago FossatiAún no hay calificaciones
- Examen Uc 201212Documento7 páginasExamen Uc 201212Poliester Tejas CuadrosAún no hay calificaciones
- SESION3Documento8 páginasSESION3Monse RLAún no hay calificaciones
- Ejercicios de Arduino ResueltosDocumento28 páginasEjercicios de Arduino ResueltosCristian Montaño CamachoAún no hay calificaciones
- Programas ArduinoDocumento8 páginasProgramas Arduinomicha2mcAún no hay calificaciones
- Actividad 7Documento7 páginasActividad 7Alexander WalkerAún no hay calificaciones
- Arduino3a PDFDocumento40 páginasArduino3a PDFAley C. ColenAún no hay calificaciones
- Capitulo 20 de Arduino Desde Cero en EspañolDocumento5 páginasCapitulo 20 de Arduino Desde Cero en EspañolNilo CAAún no hay calificaciones
- Código para Arduino para La Realización de Un Programa para Mover Un Motor A Pasos Con Inversor de Giro Sin El Uso de LibreríasDocumento4 páginasCódigo para Arduino para La Realización de Un Programa para Mover Un Motor A Pasos Con Inversor de Giro Sin El Uso de LibreríasRobert Gil SanzAún no hay calificaciones
- ContadorDocumento6 páginasContadorZxdIaminxXzlovewithzxXzyouzxAún no hay calificaciones
- Calecita Automatica CDocumento32 páginasCalecita Automatica CDiego RomeroAún no hay calificaciones
- TINKERCADDocumento5 páginasTINKERCADValeria ChavezAún no hay calificaciones
- Ejercicios de Arduino ResueltosDocumento34 páginasEjercicios de Arduino ResueltosKiara Salcedo MamaniAún no hay calificaciones
- Prelaboratorio 6 Electrónica BásicaDocumento1 páginaPrelaboratorio 6 Electrónica BásicaSebastianAún no hay calificaciones
- Electronica y Electricidad Perales Lobaton ClaraDocumento11 páginasElectronica y Electricidad Perales Lobaton Claralesli atencioAún no hay calificaciones
- Practicas 1 y 2 en ArduinoDocumento5 páginasPracticas 1 y 2 en ArduinoJhon Carlos Alfonso PintoAún no hay calificaciones
- Aprender Arduino, electrónica y programación con 100 ejercicios prácticosDe EverandAprender Arduino, electrónica y programación con 100 ejercicios prácticosCalificación: 4.5 de 5 estrellas4.5/5 (14)