También podría gustarte
- Luis CastroDocumento4 páginasLuis CastroIvan LopezAún no hay calificaciones
- Los Quemadores de KHDDocumento6 páginasLos Quemadores de KHDlevishamilton100% (2)
- Yakov Perelman Problemas e Experimentos Recreativos EspanholDocumento323 páginasYakov Perelman Problemas e Experimentos Recreativos EspanholBrandon Arce100% (1)
- FundamentosndenredesndenfibranOptica 7160f5a57d15b8cDocumento139 páginasFundamentosndenredesndenfibranOptica 7160f5a57d15b8cTHE CTR STARTAún no hay calificaciones
- 0 - Nota Explicación Uniones API o PREMIUMDocumento14 páginas0 - Nota Explicación Uniones API o PREMIUMDioni GarciaAún no hay calificaciones
- Informe Karol - Topografia GeneralDocumento7 páginasInforme Karol - Topografia GeneralLuis MendozaAún no hay calificaciones
- Circuitos Electronicos 2 - Final 4Documento6 páginasCircuitos Electronicos 2 - Final 4Ricardo TorresAún no hay calificaciones
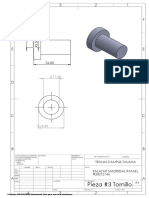
- Pieza #3 TornilloDocumento1 páginaPieza #3 TornilloRAFAEL ARTURO SALAZAR MADRIGALAún no hay calificaciones
- MicroDocumento10 páginasMicroYariahna del Carmen Rossi MaussaAún no hay calificaciones
- Estudio de Los Números y Decodificación Actualizada-David TopiDocumento37 páginasEstudio de Los Números y Decodificación Actualizada-David TopiClaudia MosqueraAún no hay calificaciones
- Curso de Numerologia Gratis Actualizado Febrero 2021Documento14 páginasCurso de Numerologia Gratis Actualizado Febrero 2021zevnovatyAún no hay calificaciones
- Concepto Del Teorema Del BinomioDocumento8 páginasConcepto Del Teorema Del BinomioANGEL ESLI NAJERA LOPEZAún no hay calificaciones
- Predimencionamiento de PresasDocumento18 páginasPredimencionamiento de PresasJaime Auqui ArecheAún no hay calificaciones
- Ejercicios Propuestos Suelos IIDocumento15 páginasEjercicios Propuestos Suelos IIPier Diego H CamAún no hay calificaciones
- Cristalizacion de Medicamentos AspirinaDocumento6 páginasCristalizacion de Medicamentos AspirinaJavier Felipe Rojas AcevedoAún no hay calificaciones
- Estadistica II ContabilidadDocumento68 páginasEstadistica II ContabilidadFranklin BricAún no hay calificaciones
- Conservación Por Frío, Regriferación y Congelación - Procesos Lácteos, 2022-2Documento21 páginasConservación Por Frío, Regriferación y Congelación - Procesos Lácteos, 2022-2JeikAún no hay calificaciones
- El Modelo Atómico de BohrDocumento3 páginasEl Modelo Atómico de BohrWilmer Cubas SolanoAún no hay calificaciones
- Presentacion Ionomeros VitreosDocumento17 páginasPresentacion Ionomeros VitreosDairy Maricel Osorto PortilloAún no hay calificaciones
- U1 Logicaproposicional 4toDocumento10 páginasU1 Logicaproposicional 4toVidal Anchiraico100% (1)
- (Publicaciones ETSI Aeronáuticos) Dr. Luis Conde - Apuntes de Física I-ETSIA - Universidad Politécnica de Madrid (UPM) (2008) PDFDocumento131 páginas(Publicaciones ETSI Aeronáuticos) Dr. Luis Conde - Apuntes de Física I-ETSIA - Universidad Politécnica de Madrid (UPM) (2008) PDFgaboelgaAún no hay calificaciones
- 05 Armonia ElementalDocumento3 páginas05 Armonia ElementalDaniela AcuñaAún no hay calificaciones
- Reparar Arranque 2Documento3 páginasReparar Arranque 2Gabo EnriqueAún no hay calificaciones
- Taller de Fundicion Ingeniería de ManufacturaDocumento2 páginasTaller de Fundicion Ingeniería de ManufacturaJorge Isaac Flores SamaniegoAún no hay calificaciones
- Informe 1 - Ensayos Martillo, PLP y Prep. MuestrasDocumento18 páginasInforme 1 - Ensayos Martillo, PLP y Prep. MuestrasDanielIgnacioLuengoCordovaAún no hay calificaciones
- Separata 16 CyT 5°Documento2 páginasSeparata 16 CyT 5°AnccohuaylloAún no hay calificaciones
- Características de RTMPDocumento3 páginasCaracterísticas de RTMPcontareaAún no hay calificaciones
- Webconferencia 5 Fisicoquímica 951-16-01Documento26 páginasWebconferencia 5 Fisicoquímica 951-16-01Liliana GutierrezAún no hay calificaciones
- Estructura Interna de La Tierra - PDFDocumento3 páginasEstructura Interna de La Tierra - PDFBalya Grandez SantillánAún no hay calificaciones