También podría gustarte
- Diagrama de CR Dito A La Palabra 02052020Documento1 páginaDiagrama de CR Dito A La Palabra 02052020Antonio Martinez RamirezAún no hay calificaciones
- Se Imiq Buap Pro Secretaria y Pro TesoreriaDocumento3 páginasSe Imiq Buap Pro Secretaria y Pro TesoreriaAntonio Martinez RamirezAún no hay calificaciones
- Resumen Capitulo 1Documento4 páginasResumen Capitulo 1Antonio Martinez RamirezAún no hay calificaciones
- Benemérita Universidad Autonóma de Puebla Facultad de Ingenieria Química Colegio de Ingeniería Química Ingenieria de Proyectos IDocumento2 páginasBenemérita Universidad Autonóma de Puebla Facultad de Ingenieria Química Colegio de Ingeniería Química Ingenieria de Proyectos IAntonio Martinez RamirezAún no hay calificaciones
- Tanques de AlmacenamientoDocumento4 páginasTanques de AlmacenamientoAntonio Martinez RamirezAún no hay calificaciones
- Adsorción de Azul de Metileno en Medio AcuosoDocumento13 páginasAdsorción de Azul de Metileno en Medio AcuosoAntonio Martinez RamirezAún no hay calificaciones
- Examen Tanque Dimensiones WallasDocumento3 páginasExamen Tanque Dimensiones WallasAntonio Martinez RamirezAún no hay calificaciones
- Aplicacion de Ecuaciones de Costos WallasDocumento2 páginasAplicacion de Ecuaciones de Costos WallasAntonio Martinez RamirezAún no hay calificaciones
- Benemérita Universidad Autonóma de Puebla Facultad de Ingenieria Química Colegio de Ingeniería Química Ingenieria de Proyectos IDocumento2 páginasBenemérita Universidad Autonóma de Puebla Facultad de Ingenieria Química Colegio de Ingeniería Química Ingenieria de Proyectos IAntonio Martinez RamirezAún no hay calificaciones
- Intercambiador WallasDocumento2 páginasIntercambiador WallasAntonio Martinez RamirezAún no hay calificaciones
- Aplicacion de Ecuaciones de Costos WallasDocumento8 páginasAplicacion de Ecuaciones de Costos WallasAntonio Martinez Ramirez0% (1)
- Tarea 1 - Mapas Mentales - Antonio Martinez RamirezDocumento7 páginasTarea 1 - Mapas Mentales - Antonio Martinez RamirezAntonio Martinez RamirezAún no hay calificaciones
- Aplicacion de Ecuaciones de Costos WallasDocumento8 páginasAplicacion de Ecuaciones de Costos WallasAntonio Martinez Ramirez0% (1)
- Costos y Punto de EquilibrioDocumento9 páginasCostos y Punto de EquilibrioAntonio Martinez RamirezAún no hay calificaciones
- Un Enfoque Basado en Programación LinealDocumento1 páginaUn Enfoque Basado en Programación LinealAntonio Martinez RamirezAún no hay calificaciones
- Servicios Auxiliares CostosDocumento11 páginasServicios Auxiliares CostosAntonio Martinez RamirezAún no hay calificaciones
- Métodos Cortos - FugDocumento1 páginaMétodos Cortos - FugAntonio Martinez RamirezAún no hay calificaciones
- Tabla de Energia Libre de GibbsDocumento44 páginasTabla de Energia Libre de GibbsAntonio Martinez RamirezAún no hay calificaciones
- 1ra Expo Matemáticas 1Documento6 páginas1ra Expo Matemáticas 1Antonio Martinez RamirezAún no hay calificaciones
- Datos de Metanol - AguaDocumento2 páginasDatos de Metanol - AguaAntonio Martinez RamirezAún no hay calificaciones
- Identificadores ElectronicosDocumento4 páginasIdentificadores ElectronicosAntonio Martinez RamirezAún no hay calificaciones
- Tarea Especial 2Documento52 páginasTarea Especial 2Antonio Martinez Ramirez100% (2)
- 3 Examen ParcialDocumento4 páginas3 Examen ParcialAntonio Martinez RamirezAún no hay calificaciones
- Acido Sulfurico AhoraDocumento4 páginasAcido Sulfurico AhoraAntonio Martinez RamirezAún no hay calificaciones
- Tarea 8Documento12 páginasTarea 8Antonio Martinez Ramirez0% (3)
- Practica 3 Curvas de Congelacion PreDocumento11 páginasPractica 3 Curvas de Congelacion PreAntonio Martinez RamirezAún no hay calificaciones
- Problema. Problema 2 (Capitulo 4-Valiente) .: Ejercicios en ChemcadDocumento1 páginaProblema. Problema 2 (Capitulo 4-Valiente) .: Ejercicios en ChemcadAntonio Martinez RamirezAún no hay calificaciones
- V de GoldwinDocumento3 páginasV de GoldwinAntonio Martinez RamirezAún no hay calificaciones
- Practica 3 Curvas de Congelacion PreDocumento11 páginasPractica 3 Curvas de Congelacion PreAntonio Martinez RamirezAún no hay calificaciones
- Volumen Especifico PDFDocumento3 páginasVolumen Especifico PDFMabel Victoria Lázaro ChoqueAún no hay calificaciones
- Ficha Tecnica Bunker C PDFDocumento3 páginasFicha Tecnica Bunker C PDFel doctol0% (3)
- Aristo Tele SDocumento7 páginasAristo Tele SSharon NavarroAún no hay calificaciones
- Ecuaciones ParamétricasDocumento6 páginasEcuaciones ParamétricasPiclonAún no hay calificaciones
- Escuela de Pensamiento AdministrativoDocumento9 páginasEscuela de Pensamiento AdministrativoRosa GomezAún no hay calificaciones
- Señales en Tiempo Continuo y DiscretoDocumento23 páginasSeñales en Tiempo Continuo y Discretoluis olivaAún no hay calificaciones
- Valores Referenciales Sobre Diferentes Propiedades de Los Suelos - CivilGeeksDocumento12 páginasValores Referenciales Sobre Diferentes Propiedades de Los Suelos - CivilGeeksfraysantanderAún no hay calificaciones
- Extracción Con Solventes PolaresDocumento3 páginasExtracción Con Solventes PolaresMarcos Rivera CastroAún no hay calificaciones
- 2 LlantasDocumento18 páginas2 LlantasErika Andrea RodriguezAún no hay calificaciones
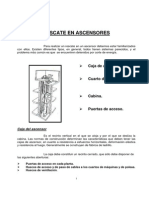
- Rescate en AscensoresDocumento9 páginasRescate en AscensoresRafaelAún no hay calificaciones
- Destilación Simple, Fraccionada y Por Arrastre de VaporDocumento4 páginasDestilación Simple, Fraccionada y Por Arrastre de VaporLeidy GarciaAún no hay calificaciones
- Calculo Traccional GAHDocumento37 páginasCalculo Traccional GAHGuillermo Aguilar Hernandes100% (1)
- Id Uva TodosDocumento76 páginasId Uva TodosJhon Ambrosio NayraAún no hay calificaciones
- TDR - Topo Batihidrofluvial - 2daDocumento43 páginasTDR - Topo Batihidrofluvial - 2daMiguel Angel Patiño DiazAún no hay calificaciones
- Proyecciones de Un SolidoDocumento36 páginasProyecciones de Un Solidojorge paucar quispe100% (1)
- Y Se Hizo La LuzDocumento8 páginasY Se Hizo La LuzAntony Ivan Flores PeraltaAún no hay calificaciones
- De JhonDocumento33 páginasDe JhonJhonatan Abanto ChuquezAún no hay calificaciones
- 4.3. - ACTIVIDADES DE EVALUACION - PracticaDocumento2 páginas4.3. - ACTIVIDADES DE EVALUACION - PracticaLUIS MIGUEL CORDOVA DIAZAún no hay calificaciones
- El Universo Es Un Dragón VerdeDocumento2 páginasEl Universo Es Un Dragón Verdemrwts0% (1)
- Proyecto de GamificaciónDocumento7 páginasProyecto de GamificaciónOscar Gibran García RosalesAún no hay calificaciones
- Fisica Práctica - Ley de HookeDocumento9 páginasFisica Práctica - Ley de HookeDavid Troya RiofríoAún no hay calificaciones
- Nom-014-Stps-2000, Exposición Laboral A Presiones AmbientaleDocumento11 páginasNom-014-Stps-2000, Exposición Laboral A Presiones AmbientaleJuan Zamora100% (1)
- Hidroelectricas y PresasDocumento8 páginasHidroelectricas y PresasStefanny AngolaAún no hay calificaciones
- Deber 7Documento2 páginasDeber 7Mario Aguaguiña M.Aún no hay calificaciones
- Ensayo de Agitadores y MezcladoresDocumento11 páginasEnsayo de Agitadores y MezcladoresMiriamJimenezLopez100% (1)
- 12 - Analisis y Descripcion de Puestos PDFDocumento36 páginas12 - Analisis y Descripcion de Puestos PDFKarenRosasAún no hay calificaciones
- Materials and Treatments SpanishDocumento68 páginasMaterials and Treatments SpanishaurelioAún no hay calificaciones
- Fusible HH Standard MTDocumento3 páginasFusible HH Standard MTGabrielAún no hay calificaciones
- Informe 2 B2Documento22 páginasInforme 2 B2Paul BenitezAún no hay calificaciones
- Dureza Rockwell CenamDocumento19 páginasDureza Rockwell CenamJason ValderramaAún no hay calificaciones