También podría gustarte
- Peugeot 207 CompactDocumento2 páginasPeugeot 207 Compactfernandolm_ing100% (3)
- Teatro PrimitivoDocumento5 páginasTeatro PrimitivoConstantino GutierrezAún no hay calificaciones
- Circular 15 Campeonato InterescuelasDocumento3 páginasCircular 15 Campeonato InterescuelasVictor Uribes RihueteAún no hay calificaciones
- El Chupacabras de Pirque - 1Documento4 páginasEl Chupacabras de Pirque - 1Marcelo A. Rubilar RubilarAún no hay calificaciones
- Matriz de Evaluacion de Riesgos...Documento4 páginasMatriz de Evaluacion de Riesgos...OLGA PATRICIA MUOZ ARROYOAún no hay calificaciones
- Cuestionario Juego 3 A 5 AnosDocumento4 páginasCuestionario Juego 3 A 5 AnosMichiventasValdiviaAún no hay calificaciones
- Tortilla de MaizDocumento8 páginasTortilla de MaizGabriela CornejohAún no hay calificaciones
- Bases para Concurso CantoDocumento2 páginasBases para Concurso CantoHector Ari LinarezAún no hay calificaciones
- La MurallaDocumento8 páginasLa MurallaCarlos Mauricio HermidaAún no hay calificaciones
- Resumen de HistoriaDocumento1 páginaResumen de Historiamedallita64Aún no hay calificaciones
- Juegos Populares y TradicionalesDocumento2 páginasJuegos Populares y TradicionalesACTIVAT-EFAún no hay calificaciones
- Símbolos SatánicosDocumento12 páginasSímbolos SatánicosMichael ToledoAún no hay calificaciones
- Modulo 09-Fundamentos Del Bsquetbol (Final)Documento26 páginasModulo 09-Fundamentos Del Bsquetbol (Final)Lu Rodriguez HuamanAún no hay calificaciones
- Catálogo de ProductosDocumento66 páginasCatálogo de ProductosEduardo StroppianaAún no hay calificaciones
- Guy Gauthier - El Documental Narrativo - Documental-FicciónDocumento14 páginasGuy Gauthier - El Documental Narrativo - Documental-FicciónFederico AkabaniAún no hay calificaciones
- Pagina de PeliculasDocumento6 páginasPagina de PeliculasJoseluis CoakiraAún no hay calificaciones
- Enunciado Problemas CortosDocumento7 páginasEnunciado Problemas CortosEulogio HerreraAún no hay calificaciones
- TravesurasDocumento3 páginasTravesurasHayde Alejandra Cruz RamosAún no hay calificaciones
- Waka Waka (Danza) - Wikipedia, La Enciclopedia LibreDocumento4 páginasWaka Waka (Danza) - Wikipedia, La Enciclopedia LibreIES CAMINACAAún no hay calificaciones
- Biografía de Un Atleta ProfesionalDocumento2 páginasBiografía de Un Atleta Profesionalkatty britoAún no hay calificaciones
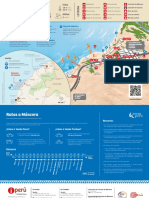
- Info Mancora BajasDocumento2 páginasInfo Mancora BajasximeAún no hay calificaciones
- Actividad 9 Matemáticas BásicasDocumento5 páginasActividad 9 Matemáticas BásicasDiana VanegasAún no hay calificaciones
- Casting 01Documento5 páginasCasting 01cristina lpezhuamanAún no hay calificaciones
- Las Multinacionales. Globalización EconómicaDocumento5 páginasLas Multinacionales. Globalización EconómicaMannuel MoralesAún no hay calificaciones
- Guia 3 ESPAÑOL GRADO 10 PERIODO 3Documento2 páginasGuia 3 ESPAÑOL GRADO 10 PERIODO 3Bryan Ceron100% (1)
- Free PreguntasTema5Documento51 páginasFree PreguntasTema5Maria Montañes AuñonAún no hay calificaciones
- Guia 9° Edu - Fisica Septiembre-NoviembreDocumento2 páginasGuia 9° Edu - Fisica Septiembre-NoviembreJESSICA JULIETH RIOS ROJASAún no hay calificaciones
- Alfonsina y El Mar. AcordesDocumento2 páginasAlfonsina y El Mar. AcordesLilia50% (2)
- Evaluacion Final - Escenario 8 - PRIMER BLOQUE-TEORICO - PRACTICO - SISTEMAS DISTRIBUIDOS - (GRUPO B0111)Documento7 páginasEvaluacion Final - Escenario 8 - PRIMER BLOQUE-TEORICO - PRACTICO - SISTEMAS DISTRIBUIDOS - (GRUPO B0111)Andres Viña CastroAún no hay calificaciones
- Descarga 5Documento1 páginaDescarga 5Nancy CaballeroAún no hay calificaciones