También podría gustarte
- Mauricio Carlos MagnoDocumento2 páginasMauricio Carlos MagnoMauricio CarvaJarcAún no hay calificaciones
- Evaluación Técnica Del Pavimento y Comparación de Métodos de Diseño de Capas de Refuerzo Asfáltico Por Guillermo Thenoux ZDocumento1 páginaEvaluación Técnica Del Pavimento y Comparación de Métodos de Diseño de Capas de Refuerzo Asfáltico Por Guillermo Thenoux ZedwinAún no hay calificaciones
- Tipos TablerosDocumento17 páginasTipos Tablerosargelis castilloAún no hay calificaciones
- El Problema de AsignacionDocumento5 páginasEl Problema de AsignacionAlex Helder HuancaraAún no hay calificaciones
- Modelo de Inventario Caja OriginalDocumento79 páginasModelo de Inventario Caja Originalnair carmenAún no hay calificaciones
- Solucion de Problemas de Ingenieria Con MatlabDocumento352 páginasSolucion de Problemas de Ingenieria Con Matlabalverick18100% (2)
- Examen Parcial Dic16Documento3 páginasExamen Parcial Dic16José Antonio Marín ArcasAún no hay calificaciones
- Crea Tu RPG en C++ y Allegro 4Documento301 páginasCrea Tu RPG en C++ y Allegro 4Carlos Villamizar0% (1)
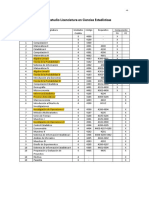
- Estadistica Pensum - UCV (UNIVERSIDAD CENTRAL DE VENEZUELA)Documento1 páginaEstadistica Pensum - UCV (UNIVERSIDAD CENTRAL DE VENEZUELA)WILMOISAún no hay calificaciones
- Introducción A La Programación de DriversDocumento25 páginasIntroducción A La Programación de DriversmybbAún no hay calificaciones
- CargadoresDocumento14 páginasCargadoresSuriel OlguinAún no hay calificaciones
- U3 Criterios de Evaluacion de ActividadesDocumento4 páginasU3 Criterios de Evaluacion de ActividadesAlma MurilloAún no hay calificaciones
- Modulo Sap PsDocumento4 páginasModulo Sap Pshector m100% (1)
- Esta Actualización Incorpora Un Nuevo Botón en La Parte de AbajoDocumento3 páginasEsta Actualización Incorpora Un Nuevo Botón en La Parte de AbajoCristián PalmaAún no hay calificaciones
- Ejercicios de Investigación OperativaDocumento43 páginasEjercicios de Investigación OperativaDanielaAún no hay calificaciones
- Web 5.simulador Medidas de Dispersion Variable Discreta y Continua 16-01 2018Documento23 páginasWeb 5.simulador Medidas de Dispersion Variable Discreta y Continua 16-01 2018Pérez EdithAún no hay calificaciones
- Guia de Aprendizaje Alfabetizacion InformaticaDocumento9 páginasGuia de Aprendizaje Alfabetizacion InformaticaInstructor TicAún no hay calificaciones
- Sistema Deteccion de Humos Por Aspiracion Asd20Documento12 páginasSistema Deteccion de Humos Por Aspiracion Asd20Bototo EscobarAún no hay calificaciones
- Introducción A La Simulacion de Eventos DiscretosDocumento12 páginasIntroducción A La Simulacion de Eventos DiscretosEnrique MarquezAún no hay calificaciones
- Base de Datos Postgresql PDFDocumento4 páginasBase de Datos Postgresql PDFlualbaleAún no hay calificaciones
- Topología Del ProcesoDocumento2 páginasTopología Del ProcesoJonathan GonzalezAún no hay calificaciones
- Tarea Semana 5 Normativa de Calidad y AmbienteDocumento5 páginasTarea Semana 5 Normativa de Calidad y AmbienteErick Garcia SerranoAún no hay calificaciones
- Act 1 Mate para TDDocumento10 páginasAct 1 Mate para TDL Lugo0% (1)
- Tarjeta de PagoDocumento7 páginasTarjeta de PagoAnaEstherGomezYanapaAún no hay calificaciones
- Cargar y Sustituir Documentos Utilizando La Herramienta de Procesamiento en MasaDocumento5 páginasCargar y Sustituir Documentos Utilizando La Herramienta de Procesamiento en MasaAdemir AlvinesAún no hay calificaciones
- Guia Homer PDFDocumento23 páginasGuia Homer PDFJuank0122Aún no hay calificaciones
- Unidad 2 Analisis Cinematico de MecanismosDocumento22 páginasUnidad 2 Analisis Cinematico de MecanismosDianaAuroraAún no hay calificaciones
- Banesco PDFDocumento2 páginasBanesco PDFAnonymous 82NY5qMuAún no hay calificaciones
- 04 - Capacitación para Prevención de Riesgos - Tarea.v1Documento2 páginas04 - Capacitación para Prevención de Riesgos - Tarea.v1Anonymous jiWp45Y0% (9)
- 1er Parcial - Sistemas Operativos 2 - 2003 Nocturno - Ingenieria SolucionDocumento2 páginas1er Parcial - Sistemas Operativos 2 - 2003 Nocturno - Ingenieria SolucionMauro ParulaAún no hay calificaciones