También podría gustarte
- 1-Manual de Windows 10 - CINFO PDFDocumento46 páginas1-Manual de Windows 10 - CINFO PDFEvelyn PS100% (1)
- Reformulado: Municipalidad Distrital de San Juan BautistaDocumento193 páginasReformulado: Municipalidad Distrital de San Juan BautistaJull AlamaAún no hay calificaciones
- Fob PDFDocumento1 páginaFob PDFJull AlamaAún no hay calificaciones
- MS PROJECT. Taller Clase 1 - CCIRADocumento6 páginasMS PROJECT. Taller Clase 1 - CCIRAJull AlamaAún no hay calificaciones
- Docsity Problemas Sobre AnualidadesDocumento29 páginasDocsity Problemas Sobre AnualidadesJull AlamaAún no hay calificaciones
- Pliego TarifarioDocumento3 páginasPliego TarifarioJull AlamaAún no hay calificaciones
- Guia Practica Del Exportador 3Documento11 páginasGuia Practica Del Exportador 3Jull AlamaAún no hay calificaciones
- Apelación de LDS PDFDocumento52 páginasApelación de LDS PDFivan rondinelAún no hay calificaciones
- A 1 PDFDocumento1 páginaA 1 PDFJull AlamaAún no hay calificaciones
- SpinDocumento2 páginasSpinJull AlamaAún no hay calificaciones
- Cuadro de Cargas Aro ActualizadoDocumento2 páginasCuadro de Cargas Aro ActualizadoJull AlamaAún no hay calificaciones
- UbicacionDocumento1 páginaUbicacionJull AlamaAún no hay calificaciones
- Exportacion PDFDocumento118 páginasExportacion PDFCArloz Rosadio CabelloAún no hay calificaciones
- SpinDocumento2 páginasSpinJull AlamaAún no hay calificaciones
- 29-Feb-2020 16-Mar-2020Documento1 página29-Feb-2020 16-Mar-2020Jull AlamaAún no hay calificaciones
- Segunda Guerra MundialDocumento1 páginaSegunda Guerra MundialArmando CrAún no hay calificaciones
- Precios de CítricosDocumento1 páginaPrecios de CítricosJull AlamaAún no hay calificaciones
- Contrato LeasingDocumento6 páginasContrato LeasingGianm ChoqueAún no hay calificaciones
- Apelación de LDS PDFDocumento52 páginasApelación de LDS PDFivan rondinelAún no hay calificaciones
- Proyecto Educativo de CentroDocumento2 páginasProyecto Educativo de CentroJull AlamaAún no hay calificaciones
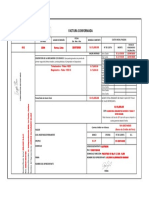
- Factura ConformadaDocumento1 páginaFactura ConformadaJull AlamaAún no hay calificaciones
- 266 20200904073146 PDFDocumento1 página266 20200904073146 PDFJull AlamaAún no hay calificaciones
- Fob PDFDocumento1 páginaFob PDFJull AlamaAún no hay calificaciones
- Texto Del Artículo-2154-2-10-20170213Documento12 páginasTexto Del Artículo-2154-2-10-20170213Luisanyela MglAún no hay calificaciones
- AnexosDocumento2 páginasAnexosJull AlamaAún no hay calificaciones
- ScaddaDocumento1 páginaScaddaJull AlamaAún no hay calificaciones
- Repaso BiquimicaDocumento1 páginaRepaso BiquimicaRonald ArdilesAún no hay calificaciones
- Legis EditadoDocumento4 páginasLegis EditadoJull AlamaAún no hay calificaciones
- RecomendacionesDocumento4 páginasRecomendacionesJull AlamaAún no hay calificaciones
- 2Documento1 página2Jull AlamaAún no hay calificaciones
- TRIBOLOGIADocumento36 páginasTRIBOLOGIAKELLY EPIAAún no hay calificaciones
- Apocalipsis 13Documento10 páginasApocalipsis 13WalterEscalante100% (1)
- XSJLKQ Rubrica Trabajos Individuales Enviados A CasaDocumento1 páginaXSJLKQ Rubrica Trabajos Individuales Enviados A CasaYahel Ochoa100% (1)
- Tarea 5Documento3 páginasTarea 5ined5puertaparadaAún no hay calificaciones
- Caso 1 - XEROX CorporationDocumento5 páginasCaso 1 - XEROX Corporationalcenet50% (2)
- Por Todo MarruecosDocumento412 páginasPor Todo MarruecosLisAún no hay calificaciones
- Cambios Que Traen SanidadDocumento178 páginasCambios Que Traen SanidadConsuelo Samuel100% (1)
- Letra P Parte 1Documento18 páginasLetra P Parte 1Marisel EspinozaAún no hay calificaciones
- Cuestionario Sobre Superacion y Habilidades SocialesDocumento1 páginaCuestionario Sobre Superacion y Habilidades SocialesHoracio PanozzoAún no hay calificaciones
- Facultad de Arquitectura Escuela Académico Profesional de ArquitecturaDocumento20 páginasFacultad de Arquitectura Escuela Académico Profesional de ArquitecturaCristiam LimaAún no hay calificaciones
- Temporada CaníbalDocumento60 páginasTemporada CaníbalMarco DíazAún no hay calificaciones
- Contaminantes InorgánicosDocumento58 páginasContaminantes InorgánicosPilar PiscoAún no hay calificaciones
- GM La Teoría de Los ColibríesDocumento18 páginasGM La Teoría de Los ColibríesJohn Fredy Medina33% (3)
- Estudio Ecomomico y Financiero.Documento4 páginasEstudio Ecomomico y Financiero.uzzi mezillemith lezama lopezAún no hay calificaciones
- Plan Estratégico Caracas 2020Documento13 páginasPlan Estratégico Caracas 2020Adriana MosqueraAún no hay calificaciones
- Extinción de Las Obligaciones TributariasDocumento4 páginasExtinción de Las Obligaciones TributariasPavlichenco Milito100% (1)
- Matriz de Control de Operaciones Seican 2023Documento9 páginasMatriz de Control de Operaciones Seican 2023SEICAN CONTABILIDADAún no hay calificaciones
- Seleccion de Cuentos Literatura InfantilDocumento25 páginasSeleccion de Cuentos Literatura InfantilAndy JaraAún no hay calificaciones
- Intercambio Vial El DerbyDocumento15 páginasIntercambio Vial El DerbyBoris Vasquez LazoAún no hay calificaciones
- 1º-2º Sesion 1 CCSS Exp.8Documento6 páginas1º-2º Sesion 1 CCSS Exp.8claraAún no hay calificaciones
- CUA E ERH - U3Documento3 páginasCUA E ERH - U3elgustoporelcafeAún no hay calificaciones
- 10-Osa MeyiDocumento196 páginas10-Osa MeyiCarrera Garcia ChongoAún no hay calificaciones
- Contexto SocialDocumento3 páginasContexto Socialalejandro tamayoAún no hay calificaciones
- PL 014-17 Politica Criminal y PenitenciariaDocumento324 páginasPL 014-17 Politica Criminal y PenitenciariaAndres Felipe Lloreda JaramilloAún no hay calificaciones
- Tipos de Datos para Almacenamiento en Memoria Act.1Documento4 páginasTipos de Datos para Almacenamiento en Memoria Act.1JOSE LEONARDO CASTAÑEDA PINTOAún no hay calificaciones
- El GüegüenseDocumento6 páginasEl Güegüensejtinoco02Aún no hay calificaciones
- Ficha Tecnica AminoacidosDocumento14 páginasFicha Tecnica AminoacidosalbertoAún no hay calificaciones
- Examen BiocelDocumento7 páginasExamen BiocelLUZAún no hay calificaciones
- Conpes 113Documento2 páginasConpes 113Karina Lucia GómezAún no hay calificaciones
- Texto Estudiante Mat 3º Sumo Primero Tomo 2Documento104 páginasTexto Estudiante Mat 3º Sumo Primero Tomo 2Gerardo Castillo100% (1)