También podría gustarte
- Robotica Movil BasicaDocumento6 páginasRobotica Movil BasicaGhery Huanca TorrezAún no hay calificaciones
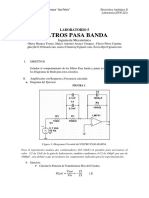
- Filtro Pasa BandaDocumento11 páginasFiltro Pasa BandaGhery Huanca TorrezAún no hay calificaciones
- Química AgrícolaDocumento493 páginasQuímica AgrícolaGhery Huanca TorrezAún no hay calificaciones
- Piramide Cim: (Computer Integrated Manufacturing)Documento1 páginaPiramide Cim: (Computer Integrated Manufacturing)Ghery Huanca TorrezAún no hay calificaciones
- 2 TermoparesDocumento3 páginas2 TermoparesGhery Huanca TorrezAún no hay calificaciones
- Laboratorio de TermodinamicaDocumento6 páginasLaboratorio de TermodinamicaGhery Huanca TorrezAún no hay calificaciones
- Entalpia de Vaporizacion Del AguaDocumento4 páginasEntalpia de Vaporizacion Del AguaGhery Huanca TorrezAún no hay calificaciones
- PoissonDocumento4 páginasPoissonGhery Huanca TorrezAún no hay calificaciones
- Aceptacion y RechazoDocumento5 páginasAceptacion y RechazoGhery Huanca TorrezAún no hay calificaciones
- Qué Es Un TermistorDocumento4 páginasQué Es Un TermistorGhery Huanca TorrezAún no hay calificaciones
- Lab 8 Balanza de CorrienteDocumento6 páginasLab 8 Balanza de CorrienteGhery Huanca Torrez100% (1)
- Frecuencia de ResonanciaDocumento5 páginasFrecuencia de ResonanciaGhery Huanca Torrez100% (1)
- Estructura de Descomposición Del TrabajoDocumento34 páginasEstructura de Descomposición Del TrabajoNelly LolanAún no hay calificaciones
- Caso de EstudioDocumento2 páginasCaso de EstudioKimberly LunaAún no hay calificaciones
- Apostemos Que Me CasoDocumento7 páginasApostemos Que Me CasoBrayan Picoy ValerioAún no hay calificaciones
- Investigacion de OperacionesDocumento130 páginasInvestigacion de OperacionescarlosAún no hay calificaciones
- Proyecto Final SimulacionDocumento22 páginasProyecto Final SimulacionJavier SayavedraAún no hay calificaciones
- Ventajas y Desventajas Del InternetDocumento4 páginasVentajas y Desventajas Del InternetBrenda SalvatierraAún no hay calificaciones
- Lab 5 FortalezasDocumento7 páginasLab 5 FortalezasClaudia PeñalozaAún no hay calificaciones
- Proyecto CañonDocumento3 páginasProyecto CañonHenry RiveraAún no hay calificaciones
- Informe Técnico de Cableado Estructurado de La Carrera Ingeniería Civil Del Instituto Politécnico Santiago MariñoDocumento5 páginasInforme Técnico de Cableado Estructurado de La Carrera Ingeniería Civil Del Instituto Politécnico Santiago Mariñowilrojo1983Aún no hay calificaciones
- Industria 4.0bGEINFORDocumento18 páginasIndustria 4.0bGEINFORmmendoza569Aún no hay calificaciones
- Temario Autocad 2011 2d y 3dDocumento8 páginasTemario Autocad 2011 2d y 3ddaranda_72Aún no hay calificaciones
- Tiempo de Ejecución Insercion SortDocumento3 páginasTiempo de Ejecución Insercion SortdanielAún no hay calificaciones
- Diagramas de FlujoDocumento38 páginasDiagramas de Flujoj_u_a_n1995100% (1)
- Alfabetizacion Taller 2 ElectivoDocumento12 páginasAlfabetizacion Taller 2 ElectivoRozasReyesGermánAún no hay calificaciones
- Algebra - I Primer ParcialDocumento7 páginasAlgebra - I Primer ParcialMichael Slater Ocaña PuiconAún no hay calificaciones
- Analisis Caso FacebookDocumento6 páginasAnalisis Caso FacebookErick Gonzales PadillaAún no hay calificaciones
- Fundamentos de html2Documento19 páginasFundamentos de html2DonaldRamonRizoAún no hay calificaciones
- Tareas Básicas en Access 2010Documento21 páginasTareas Básicas en Access 2010jjairrAún no hay calificaciones
- Expo MatematicaDocumento6 páginasExpo Matematicarosario sanchez suclliAún no hay calificaciones
- Hablemos de LOD en BIMDocumento2 páginasHablemos de LOD en BIMErwinAún no hay calificaciones
- Suma de RiemannDocumento2 páginasSuma de RiemannJavier Garcia RajoyAún no hay calificaciones
- Unidad 3 Paso 4 Propiedades IsometricasDocumento36 páginasUnidad 3 Paso 4 Propiedades IsometricasJohanaAún no hay calificaciones
- 1 - TUTORIAL BASICO LOGISIM - OdpDocumento10 páginas1 - TUTORIAL BASICO LOGISIM - OdpItsel VázquezAún no hay calificaciones
- Articulo El Modelo de Ciclo de Vida para Validacion de LimpiezaDocumento4 páginasArticulo El Modelo de Ciclo de Vida para Validacion de Limpiezajpabloqf100% (1)
- 6.1.5.6 Lab - System Utilities in WindowsDocumento12 páginas6.1.5.6 Lab - System Utilities in WindowsAnonymous OCxP8JlcF100% (2)
- Informe de ProbabilidadDocumento32 páginasInforme de Probabilidadharold0% (1)
- Evaluacion Sumativa Matematica N°1 4° Basico 2019Documento5 páginasEvaluacion Sumativa Matematica N°1 4° Basico 2019Carolina AusenteAún no hay calificaciones
- Unidad 1Documento4 páginasUnidad 1Andreina CevallosAún no hay calificaciones
- Aireplay NG - Es AircrackDocumento4 páginasAireplay NG - Es Aircrackzombira32Aún no hay calificaciones
- Taller Primera Clase ITDocumento6 páginasTaller Primera Clase ITGerman AriasAún no hay calificaciones