También podría gustarte
- Rau Nunez Cabello - TALLER DE ESTADISTICA Y PROBABILIDADDocumento38 páginasRau Nunez Cabello - TALLER DE ESTADISTICA Y PROBABILIDADmimajiAún no hay calificaciones
- CLASE9Documento17 páginasCLASE9Laime CarrilloAún no hay calificaciones
- Transformada FourierDocumento76 páginasTransformada FourierLaime CarrilloAún no hay calificaciones
- Clase1 PDFDocumento16 páginasClase1 PDFJanner GamarraAún no hay calificaciones
- Analisis de Señales-2Documento11 páginasAnalisis de Señales-2Laime CarrilloAún no hay calificaciones
- Libro 8º CienciasDocumento226 páginasLibro 8º CienciasAlexis RennerAún no hay calificaciones
- Análisis de señales continuas y discretasDocumento19 páginasAnálisis de señales continuas y discretasLaime CarrilloAún no hay calificaciones
- CLASE10Documento24 páginasCLASE10Laime CarrilloAún no hay calificaciones
- CLASE11Documento25 páginasCLASE11Laime CarrilloAún no hay calificaciones
- Manual MATLAB PDFDocumento33 páginasManual MATLAB PDFFredy Andres Valencia100% (1)
- ConvolucioncontinuaDocumento12 páginasConvolucioncontinuaLaime CarrilloAún no hay calificaciones
- Convolucion DiscretaDocumento18 páginasConvolucion DiscretaLaime CarrilloAún no hay calificaciones
- Reclamaciones Por Valoración Del VideoDocumento7 páginasReclamaciones Por Valoración Del VideoLaime CarrilloAún no hay calificaciones
- BIOLOGIADocumento5 páginasBIOLOGIALaime CarrilloAún no hay calificaciones
- T5 2ESO Sistemas Materiales VToreno 2.0Documento10 páginasT5 2ESO Sistemas Materiales VToreno 2.0Josedu MartinezAún no hay calificaciones
- MatematicaDocumento25 páginasMatematicaLaime CarrilloAún no hay calificaciones
- Clasificacion de Los Seres Vivos - MicrobiologiaDocumento10 páginasClasificacion de Los Seres Vivos - MicrobiologiaLaime CarrilloAún no hay calificaciones
- Orientaciones y Formatos para Reclamaciones ECDF III - FecodeDocumento3 páginasOrientaciones y Formatos para Reclamaciones ECDF III - FecodeLector Estelar ArabeAún no hay calificaciones
- HONGOSDocumento8 páginasHONGOSLaime CarrilloAún no hay calificaciones
- Guia Taller Iniciacion Cast PDFDocumento258 páginasGuia Taller Iniciacion Cast PDFJacqueline AvendañoAún no hay calificaciones
- ANEXO No. 02 FICHAS RESUMEN ANALTICO EDUCATIVODocumento93 páginasANEXO No. 02 FICHAS RESUMEN ANALTICO EDUCATIVOLaime CarrilloAún no hay calificaciones
- Anexo 10 Portafolio de ServiciosDocumento1 páginaAnexo 10 Portafolio de ServiciosLaime CarrilloAún no hay calificaciones
- Terminos y Condiciones Encuentro NAL 2018Documento13 páginasTerminos y Condiciones Encuentro NAL 2018Laime CarrilloAún no hay calificaciones
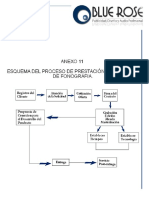
- Anexo 11b Flujograma Del Servicio de FonografiaDocumento1 páginaAnexo 11b Flujograma Del Servicio de FonografiaLaime CarrilloAún no hay calificaciones
- Plazas de Primarias Vacantes PDFDocumento6 páginasPlazas de Primarias Vacantes PDFLaime CarrilloAún no hay calificaciones
- Aprendizaje ColaborativoDocumento500 páginasAprendizaje ColaborativoMarus LaraAún no hay calificaciones
- Anexo 17b Mapa de MacrolocalizacionDocumento1 páginaAnexo 17b Mapa de MacrolocalizacionLaime CarrilloAún no hay calificaciones
- Resolucion 000764 de 9 de Noviembre de 2017 PDFDocumento4 páginasResolucion 000764 de 9 de Noviembre de 2017 PDFLaime CarrilloAún no hay calificaciones
- Relacion Docentes Convocatoria 2016-2017Documento20 páginasRelacion Docentes Convocatoria 2016-2017Laime CarrilloAún no hay calificaciones
- Listado de Admitidos programa Derecho 2018Documento2 páginasListado de Admitidos programa Derecho 2018Laime CarrilloAún no hay calificaciones
- Propiedades de la adición y sustracciónDocumento6 páginasPropiedades de la adición y sustracciónAAún no hay calificaciones
- Unidad 1.3 Calculo DiferencialDocumento3 páginasUnidad 1.3 Calculo DiferenciallauraAún no hay calificaciones
- Representacion de SeñalesDocumento45 páginasRepresentacion de SeñalesDavid LemaAún no hay calificaciones
- Cálculo vectorial: álgebra y geometría de vectoresDocumento41 páginasCálculo vectorial: álgebra y geometría de vectoresIvette VillegasAún no hay calificaciones
- CALCULO 2 Capitulo 2Documento15 páginasCALCULO 2 Capitulo 2Dario Angel Miranda PamuriAún no hay calificaciones
- Unidad 4 Con RespuestasDocumento19 páginasUnidad 4 Con RespuestasCharo Morales Avendaño100% (1)
- Repaso Unidad 4Documento11 páginasRepaso Unidad 4Gabriel De Nalda BertolinAún no hay calificaciones
- Vectores CartesianosDocumento14 páginasVectores CartesianosJc Domínguez50% (2)
- Guia3 3er-Lapso 3er-AñoDocumento5 páginasGuia3 3er-Lapso 3er-AñoJesús ChacónAún no hay calificaciones
- Hoja de Ejercicios de Algebra LinealDocumento2 páginasHoja de Ejercicios de Algebra LinealEdison Espinel SevillaAún no hay calificaciones
- Tipos de VectoresDocumento6 páginasTipos de VectoresAlma Rubi HMoraAún no hay calificaciones
- Division Algebraica y Cocientes NotablesDocumento6 páginasDivision Algebraica y Cocientes NotablesJean Piere AguinagaAún no hay calificaciones
- Jancsa, Patricia - Algebras de LieDocumento40 páginasJancsa, Patricia - Algebras de LieFelipe OrtizAún no hay calificaciones
- SISTEMA DE LOS N y ZDocumento4 páginasSISTEMA DE LOS N y ZJhon Suma GamarraAún no hay calificaciones
- Cálculo de valores propios en dimensión finitaDocumento71 páginasCálculo de valores propios en dimensión finitaElías GómezAún no hay calificaciones
- La Geometrıa ElıpticaDocumento14 páginasLa Geometrıa ElıpticaLINA MARCELA ZULUAGA ÁLVAREZAún no hay calificaciones
- AlgebraDocumento24 páginasAlgebraRefugio CarmonaAún no hay calificaciones
- Notas Curso Propedéutico Matemáticas - Dr. Mohamed BadaouiDocumento132 páginasNotas Curso Propedéutico Matemáticas - Dr. Mohamed BadaouiVíctor Hugo Reséndiz Estrada100% (1)
- 5º Vac - MatematicaDocumento86 páginas5º Vac - MatematicaelvisAún no hay calificaciones
- Analisis Vectorial UPNDocumento36 páginasAnalisis Vectorial UPNJuan Carlos Bazán CenturiónAún no hay calificaciones
- Matrices de Orden InferiorDocumento3 páginasMatrices de Orden InferiorJohnny CerdaAún no hay calificaciones
- 4° Matemática EstereometriaDocumento11 páginas4° Matemática EstereometriaClaudia HafelinAún no hay calificaciones
- Aplicaciones Del Cálculo y Estadística Sesión 1-Semana 6 PDFDocumento19 páginasAplicaciones Del Cálculo y Estadística Sesión 1-Semana 6 PDFRenato Pongo FernandezAún no hay calificaciones
- Solución de Foro Unidad 1 de Matematica Aplicada by Katherine Leon PDFDocumento7 páginasSolución de Foro Unidad 1 de Matematica Aplicada by Katherine Leon PDFdelicrispetasAún no hay calificaciones
- Polinomios EspecialesDocumento12 páginasPolinomios Especialesluifabiano123ccoraAún no hay calificaciones
- Mapa ConceptualDocumento1 páginaMapa Conceptualcarlos sagreroAún no hay calificaciones
- Algebra Liear para Cursos UniversitariosDocumento455 páginasAlgebra Liear para Cursos Universitariosflor de lisz100% (1)
- Guía de Múltiplos y DivisoresDocumento9 páginasGuía de Múltiplos y DivisoresMaría Belén Carvalho CepedaAún no hay calificaciones
- VarcomDocumento162 páginasVarcomElmer Escobar RomeroAún no hay calificaciones
- UyuyuyDocumento2 páginasUyuyuyasaichi akawaraAún no hay calificaciones