También podría gustarte
- Plan de Calidad Tuberias HDPEDocumento9 páginasPlan de Calidad Tuberias HDPERoggers Cayllahua Gutierrez100% (1)
- Geografía para Primero de SecundariaDocumento6 páginasGeografía para Primero de SecundariaAnder Sanchez67% (3)
- PRUEBA FORMATIVA - TRIGONOMETRÍA.FG - PRIM.2022vDocumento2 páginasPRUEBA FORMATIVA - TRIGONOMETRÍA.FG - PRIM.2022vRomina Mamani100% (1)
- Programa de Lodos Pozo SAL-18Documento16 páginasPrograma de Lodos Pozo SAL-18Jhonny Cruz Muñoz100% (1)
- Reparar Un Bombillo Ahorrador o Lámpara AhorradoraDocumento14 páginasReparar Un Bombillo Ahorrador o Lámpara Ahorradoraaarcaarc100% (1)
- Cartilla Mapa ClimaticoDocumento9 páginasCartilla Mapa ClimaticoVictor TomastoAún no hay calificaciones
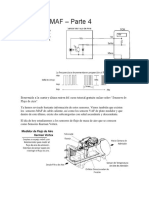
- Sensores MAFDocumento4 páginasSensores MAFAlberto M FuentesAún no hay calificaciones
- 3 Metodología para Realizar El Inventario de DañosDocumento108 páginas3 Metodología para Realizar El Inventario de DañosOficina InterventoriasAún no hay calificaciones
- Resena EjerciciosDocumento2 páginasResena EjerciciosLuna LopezAún no hay calificaciones
- Libro de Trigonometria Preuniversitaria PDFDocumento12 páginasLibro de Trigonometria Preuniversitaria PDFcalculo variableAún no hay calificaciones
- Diseño EstructuralDocumento3 páginasDiseño EstructuralJorgeLópezAún no hay calificaciones
- Clase Potencias II Medio (Recordatorio)Documento33 páginasClase Potencias II Medio (Recordatorio)Angelo StalinAún no hay calificaciones
- Ecuaciones para ExponerDocumento12 páginasEcuaciones para ExponerKatheryne ShirleyAún no hay calificaciones
- Desbalance MecanicoDocumento10 páginasDesbalance MecanicorichardAún no hay calificaciones
- Contenido de HumedadDocumento10 páginasContenido de HumedadWalterFredyGutierrezCanazaAún no hay calificaciones
- La ElectricidadDocumento5 páginasLa ElectricidadElver Jimenez CastilloAún no hay calificaciones
- CARLOS CALIZAYA - RECONOCIMIENTO DE MINERALES BlancoDocumento8 páginasCARLOS CALIZAYA - RECONOCIMIENTO DE MINERALES BlancoIsabelCamaAún no hay calificaciones
- INFORME IEEE Visita TecnicaDocumento2 páginasINFORME IEEE Visita TecnicaJefferson Criollo100% (1)
- Informe de Salida A CampoDocumento9 páginasInforme de Salida A CampoAnonymous oPcBoAAAún no hay calificaciones
- Manual de Practicas Física ClasicaDocumento52 páginasManual de Practicas Física ClasicaHector Ma NAún no hay calificaciones
- C Uestion A Rio Electrostatic ADocumento3 páginasC Uestion A Rio Electrostatic ALópez García Johann NizaelAún no hay calificaciones
- 1.3 SismosDocumento30 páginas1.3 SismosDangelo Rodrigo Cortes CanalesAún no hay calificaciones
- 3.3. Empuje y FlotaciónDocumento7 páginas3.3. Empuje y FlotaciónJohn Anthony EscobarAún no hay calificaciones
- Daewoo Dwa y DWC 121r, Dwa-150rDocumento36 páginasDaewoo Dwa y DWC 121r, Dwa-150rStevenAún no hay calificaciones
- Procesamiento Digital de Señales: Obtención de La Transformada Discreta de Fourier para Señales Periódicas SinusoidalesDocumento20 páginasProcesamiento Digital de Señales: Obtención de La Transformada Discreta de Fourier para Señales Periódicas SinusoidalesJonathan Gabriel Catari AlanocaAún no hay calificaciones
- Convesión de UnidadesDocumento29 páginasConvesión de Unidadesjefferson gupulemaAún no hay calificaciones
- Zavala Michael Media Mediana Moda Datos Agrupados IntervalosDocumento6 páginasZavala Michael Media Mediana Moda Datos Agrupados IntervalosMichael ZavalaAún no hay calificaciones
- UD15. Circuitos Eléctricos de Corriente ContinuaDocumento47 páginasUD15. Circuitos Eléctricos de Corriente Continuapericop13pAún no hay calificaciones