También podría gustarte
- Presentacion 2 InstrumentacionDocumento20 páginasPresentacion 2 InstrumentacionRaul CanalesAún no hay calificaciones
- Clase IX Introducción Economía Segundo Semestre 2012Documento13 páginasClase IX Introducción Economía Segundo Semestre 2012Raul CanalesAún no hay calificaciones
- Sistema OPCDocumento74 páginasSistema OPCCristian ProbosteAún no hay calificaciones
- Guia de Ejercicios Resueltos Micro Eco No MiaDocumento15 páginasGuia de Ejercicios Resueltos Micro Eco No MiaRaul CanalesAún no hay calificaciones
- Tesis MagisterDocumento98 páginasTesis MagisterRaul CanalesAún no hay calificaciones
- Clase IV Introducción Economía Segundo Semestre 2012Documento23 páginasClase IV Introducción Economía Segundo Semestre 2012Raul CanalesAún no hay calificaciones
- Informe Control TemperaturaDocumento17 páginasInforme Control TemperaturaRaul Canales100% (1)
- Instrumentacion Informe AnalogicoDocumento22 páginasInstrumentacion Informe AnalogicoRaul CanalesAún no hay calificaciones
- Informe InfilinkDocumento72 páginasInforme InfilinkRaul CanalesAún no hay calificaciones
- Informe AnalogosDocumento14 páginasInforme AnalogosRaul CanalesAún no hay calificaciones
- Informe ANALOGODocumento16 páginasInforme ANALOGORaul CanalesAún no hay calificaciones
- Cap 12-2013 LaplaceDocumento32 páginasCap 12-2013 LaplaceMarcelo RiosAún no hay calificaciones
- Sensores de NivelDocumento31 páginasSensores de NivelRaul CanalesAún no hay calificaciones
- Informe Control TemperaturaDocumento17 páginasInforme Control TemperaturaRaul Canales100% (1)
- Guia SCADA TIAPORTAL13 01 Introduccion y Motor v0.1Documento16 páginasGuia SCADA TIAPORTAL13 01 Introduccion y Motor v0.1Raul CanalesAún no hay calificaciones
- Arquitectura de Controladores Logicos ProgramablesDocumento1 páginaArquitectura de Controladores Logicos ProgramablesRaul CanalesAún no hay calificaciones
- 1.1.-Tipos de Datos PLC PDFDocumento27 páginas1.1.-Tipos de Datos PLC PDFJuan Muñoz50% (2)
- Edo Var SeparablesDocumento8 páginasEdo Var SeparablesGabriel GutierrezAún no hay calificaciones
- Guia N°4 PLC Con Variador de FrecuenciaDocumento1 páginaGuia N°4 PLC Con Variador de FrecuenciaRaul CanalesAún no hay calificaciones
- Guia N°1 Controladores PIDDocumento1 páginaGuia N°1 Controladores PIDRaul CanalesAún no hay calificaciones
- Guia HMI Delta (Introducción A DOPSoft)Documento7 páginasGuia HMI Delta (Introducción A DOPSoft)Raul Canales33% (3)
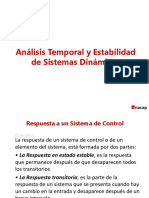
- Analisis Temporal de Sistemas DinamicosDocumento36 páginasAnalisis Temporal de Sistemas DinamicosRaul CanalesAún no hay calificaciones
- Clase 4 Diagramas de Bloques 1207151362505551 9Documento22 páginasClase 4 Diagramas de Bloques 1207151362505551 9Raul CanalesAún no hay calificaciones
- Guia N°1 Controladores PID PDFDocumento1 páginaGuia N°1 Controladores PID PDFRaul CanalesAún no hay calificaciones
- UGM Informe Workshop Interaction DesignDocumento21 páginasUGM Informe Workshop Interaction DesignRaul CanalesAún no hay calificaciones
- Formato de CampeonatoDocumento3 páginasFormato de CampeonatoRaul CanalesAún no hay calificaciones
- 03 - Diagramas de Bloques ReduccionDocumento9 páginas03 - Diagramas de Bloques ReduccionJuan Linares100% (3)
- Guia #3 Problemas Dinamica de FluidosDocumento4 páginasGuia #3 Problemas Dinamica de FluidosRaul CanalesAún no hay calificaciones
- Formato de CampeonatoDocumento3 páginasFormato de CampeonatoRaul CanalesAún no hay calificaciones
- Reglamento Oficial de La Asociacion Boliviana de Futbol de MesaDocumento39 páginasReglamento Oficial de La Asociacion Boliviana de Futbol de MesaRaul CanalesAún no hay calificaciones
- Tema2 MecánicaDocumento15 páginasTema2 MecánicaEmilio BonnetAún no hay calificaciones
- Evidencia 3 - Fenomenos Físicos - 2020Documento6 páginasEvidencia 3 - Fenomenos Físicos - 2020Bernardo AlmazanAún no hay calificaciones
- Taller Parcial 1 Descubriendo La FísicaDocumento30 páginasTaller Parcial 1 Descubriendo La FísicaEliana SalasAún no hay calificaciones
- Prob 1 BandasDocumento16 páginasProb 1 BandasLudwig Iván Soria ZárateAún no hay calificaciones
- Serie 2Documento21 páginasSerie 2Kelly CondoriAún no hay calificaciones
- IntegralesDocumento23 páginasIntegralesoliverAún no hay calificaciones
- Fase 2 - Grupo 8 - Ley de FourierDocumento15 páginasFase 2 - Grupo 8 - Ley de FourierMery RamirezAún no hay calificaciones
- Propiedades Mecánicas de Diferentes MaterialesDocumento16 páginasPropiedades Mecánicas de Diferentes MaterialesErickAún no hay calificaciones
- FRICCIONDocumento46 páginasFRICCIONranduAún no hay calificaciones
- Boletín de Problemas de Física 1 - 2020-21Documento32 páginasBoletín de Problemas de Física 1 - 2020-21Fran VegaAún no hay calificaciones
- Syllabus FisicaDocumento8 páginasSyllabus FisicaAnthony FeriaAún no hay calificaciones
- Resistencia Ejercicios 1Documento7 páginasResistencia Ejercicios 1Ulises OlveraAún no hay calificaciones
- Informe Fuerza EléctricaDocumento20 páginasInforme Fuerza EléctricaBryanAún no hay calificaciones
- z2 Con AASHTO LRFD 2014 - Ing. Arturo Rodríguez Serquén-7Documento6 páginasz2 Con AASHTO LRFD 2014 - Ing. Arturo Rodríguez Serquén-7JAVIER SIETEAún no hay calificaciones
- Lima 2011 EspDocumento71 páginasLima 2011 EspRaul PozoAún no hay calificaciones
- Ejemplo Proyecto Analisis NumericoDocumento19 páginasEjemplo Proyecto Analisis NumericotomAún no hay calificaciones
- 10mo Grado Fisica 25-08-2018 DignaDocumento4 páginas10mo Grado Fisica 25-08-2018 DignaJosé SánchezAún no hay calificaciones
- GasoductoDocumento44 páginasGasoductoRUTHAún no hay calificaciones
- MRUVDocumento10 páginasMRUVAriel Villarroel RomanoAún no hay calificaciones
- Memoria de Calculo Muro de Contencion Nro 6Documento6 páginasMemoria de Calculo Muro de Contencion Nro 6Marco Antonio Cusirimay FuseAún no hay calificaciones
- HORARIO - 2021-0 NACIONAL Ing CivilDocumento6 páginasHORARIO - 2021-0 NACIONAL Ing CivilEddy Vasquez MolinaAún no hay calificaciones
- Practica Calificada 2Documento4 páginasPractica Calificada 2adrianAún no hay calificaciones
- Unidad 1-Hidraulica de CanalesDocumento22 páginasUnidad 1-Hidraulica de CanalesRa Ferez100% (1)
- Energía Cinética Energía Potencial Energía ElásticaDocumento1 páginaEnergía Cinética Energía Potencial Energía Elásticadomenica remacheAún no hay calificaciones
- Informe de Laboratorio 2º de FisicoquimicaDocumento38 páginasInforme de Laboratorio 2º de FisicoquimicathonyAún no hay calificaciones
- Ejercicio Viscosimetria 01Documento2 páginasEjercicio Viscosimetria 01gabeol27Aún no hay calificaciones
- Trans 6Documento13 páginasTrans 6Jona AgueroAún no hay calificaciones
- 1 Cinematica de ParticulasDocumento47 páginas1 Cinematica de ParticulasphrasalverbsAún no hay calificaciones
- 2 PC Física II CivilDocumento1 página2 PC Física II CivilJair Molina LopezAún no hay calificaciones
- Capa Limite InformeDocumento11 páginasCapa Limite InformeJunior DavidAún no hay calificaciones