También podría gustarte
- Shoplogix PDFDocumento4 páginasShoplogix PDFHcn CNAún no hay calificaciones
- Icstt Rm006 Es PDocumento35 páginasIcstt Rm006 Es PJavier MoromenachoAún no hay calificaciones
- Mensajeria Rslogix5000 PDFDocumento10 páginasMensajeria Rslogix5000 PDFHcn CNAún no hay calificaciones
- Reporte Proyecto de PLCDocumento7 páginasReporte Proyecto de PLCHcn CNAún no hay calificaciones
- Reporte Proyecto de PLCDocumento7 páginasReporte Proyecto de PLCHcn CNAún no hay calificaciones
- DiseñoDocumento2 páginasDiseñoHcn CNAún no hay calificaciones
- Intro Ducci OnDocumento2 páginasIntro Ducci OnHcn CNAún no hay calificaciones
- RomanDocumento21 páginasRomanHcn CNAún no hay calificaciones
- RomanDocumento21 páginasRomanHcn CNAún no hay calificaciones
- LaTeX 2013 PDFDocumento304 páginasLaTeX 2013 PDFManolo Ericson GutiAún no hay calificaciones
- Practica 1Documento8 páginasPractica 1LESLIE POLET SUASTEGUI CABALLEROAún no hay calificaciones
- Resumen EjecutivoDocumento15 páginasResumen Ejecutivoestefani yanquenAún no hay calificaciones
- Teorías Psicológicas Del DueloDocumento2 páginasTeorías Psicológicas Del Duelodon fer92% (12)
- Oraciones Disyuntivas: Coordinantes y SubordinantesDocumento3 páginasOraciones Disyuntivas: Coordinantes y SubordinantesAshanti VargasAún no hay calificaciones
- Lecturas Con Preguntas y Respuestas - 1º SecundariaDocumento23 páginasLecturas Con Preguntas y Respuestas - 1º SecundariaOliver GonzalezAún no hay calificaciones
- Análisis de Acero - P - I - CostosDocumento21 páginasAnálisis de Acero - P - I - CostosJorge Hernández GaliciaAún no hay calificaciones
- Psicoanalisis y ConductismoDocumento7 páginasPsicoanalisis y ConductismoMariel IsclauAún no hay calificaciones
- Problemas en Prestación de Servicios de SaludDocumento7 páginasProblemas en Prestación de Servicios de Saludapi-3817904100% (2)
- Planificacion No.5Documento6 páginasPlanificacion No.5Gabriel TorresAún no hay calificaciones
- Planificación de Proyectos Software - LDCDocumento23 páginasPlanificación de Proyectos Software - LDCDaniel Fuentes LópezAún no hay calificaciones
- 3°? Examen Mensual Febrero (2022-2023)Documento10 páginas3°? Examen Mensual Febrero (2022-2023)Grettel EspinosaAún no hay calificaciones
- INFORMEDocumento29 páginasINFORMEcarlosmorgadohdzAún no hay calificaciones
- Reglamento Interno de La Procuraduría Estatal de Protección Al AmbienteDocumento16 páginasReglamento Interno de La Procuraduría Estatal de Protección Al AmbienteAlejandro SanchezAún no hay calificaciones
- Un Capítulo Pendiente: El Método en El Debate Didáctico Contemporáneo - Gloria EdelsteinDocumento2 páginasUn Capítulo Pendiente: El Método en El Debate Didáctico Contemporáneo - Gloria Edelsteinidontknoman75% (4)
- Landscape A5 EsDocumento391 páginasLandscape A5 EsMartínMaldonadoAún no hay calificaciones
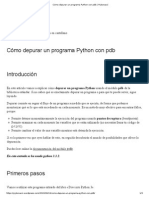
- Cómo Depurar Un Programa Python Con PDB - PybonacciDocumento9 páginasCómo Depurar Un Programa Python Con PDB - PybonacciAndrea VNAún no hay calificaciones
- Tipos de MarketingDocumento1 páginaTipos de MarketingMathius Nuñez CasillaAún no hay calificaciones
- Plan Estrategico de La Optica MaxivisionDocumento27 páginasPlan Estrategico de La Optica MaxivisionJiménez Chávez JaimeAún no hay calificaciones
- Aspectos Generales de ConjuntosDocumento3 páginasAspectos Generales de ConjuntosSusan AlvaradoAún no hay calificaciones
- Prueba de Jarras planta aguaDocumento17 páginasPrueba de Jarras planta aguaNestor Augusto Oyarce100% (1)
- Teoría general de la administración educativaDocumento2 páginasTeoría general de la administración educativaSarahaby FloresAún no hay calificaciones
- Link 208Documento2 páginasLink 208JaimeAún no hay calificaciones
- 3.3.1 Falasias PDFDocumento6 páginas3.3.1 Falasias PDFGabriel GalanAún no hay calificaciones
- Análisis estratégico de Parque Arauco S.A a través de herramientas de Control de GestiónDocumento93 páginasAnálisis estratégico de Parque Arauco S.A a través de herramientas de Control de GestiónDaniela Bravo Vidal88% (8)
- Informe Final Snap Argpaz Uis 111Documento25 páginasInforme Final Snap Argpaz Uis 111Johan Steven Pinto AcostaAún no hay calificaciones
- PSExec Pass The HashDocumento1 páginaPSExec Pass The Hashb3t0m4nAún no hay calificaciones
- GEOMETRIADocumento37 páginasGEOMETRIAAndréss CadenaAún no hay calificaciones
- ITCM Celaya: Potencia de prueba estadística, factores que influyen y cómo aumentarlaDocumento4 páginasITCM Celaya: Potencia de prueba estadística, factores que influyen y cómo aumentarlaAraceli AbarcaAún no hay calificaciones
- Inyectores DieselDocumento12 páginasInyectores DieselAlvaro Alexander Aliaga AvilaAún no hay calificaciones
- Mitosis en cebolla y habaDocumento6 páginasMitosis en cebolla y habaKristelita Cerino MagañaAún no hay calificaciones