También podría gustarte
- Calculo de Momentos de AgrietamientoDocumento8 páginasCalculo de Momentos de AgrietamientoDaniel Puchaicela AbendañoAún no hay calificaciones
- Dias Programados Cristian UgazDocumento176 páginasDias Programados Cristian UgazCristian Ugaz SoberónAún no hay calificaciones
- Trabajo Teorico SapDocumento8 páginasTrabajo Teorico SapCristian Ugaz SoberónAún no hay calificaciones
- Cálculos Previos Concreto ArmadoDocumento31 páginasCálculos Previos Concreto ArmadoCristian Ugaz SoberónAún no hay calificaciones
- Ugaz Soberon Cristian - Practica Calificada Nº02Documento10 páginasUgaz Soberon Cristian - Practica Calificada Nº02Cristian Ugaz SoberónAún no hay calificaciones
- Anal Is Is de Cos To Sunita RiosDocumento318 páginasAnal Is Is de Cos To Sunita RiosRonald Chaiña SalazarAún no hay calificaciones
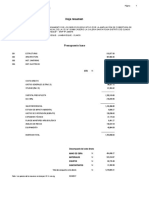
- 06.01. ResumenpresupuestoinfesDocumento1 página06.01. ResumenpresupuestoinfesCristian Ugaz SoberónAún no hay calificaciones
- Metodo de LumenDocumento14 páginasMetodo de LumenCristian Ugaz SoberónAún no hay calificaciones
- 06.02. PresupuestoclienteresumenDocumento9 páginas06.02. PresupuestoclienteresumenCristian Ugaz SoberónAún no hay calificaciones
- Antecedentes Del ProblemaDocumento3 páginasAntecedentes Del ProblemaCristian Ugaz SoberónAún no hay calificaciones
- Hidraulica de Canales - Problemas Resueltos - Maximo Villon Bejar PDFDocumento506 páginasHidraulica de Canales - Problemas Resueltos - Maximo Villon Bejar PDFegodi0000991% (206)
- Ejercicios de MatlabDocumento5 páginasEjercicios de MatlabCristian Ugaz SoberónAún no hay calificaciones
- Ejercicios Ley KirchhoffDocumento4 páginasEjercicios Ley KirchhoffCristian Ugaz SoberónAún no hay calificaciones
- Formula Rio CanalesDocumento1 páginaFormula Rio CanalesJames GamboaAún no hay calificaciones
- Ensayo TriaxialDocumento15 páginasEnsayo TriaxialCristian Ugaz SoberónAún no hay calificaciones
- Determine La Frecuencia CircularDocumento7 páginasDetermine La Frecuencia CircularCristian Ugaz SoberónAún no hay calificaciones
- Introducción, Generalidades y ObjetivosDocumento9 páginasIntroducción, Generalidades y ObjetivosCristian Ugaz SoberónAún no hay calificaciones
- Introducción, Generalidades y ObjetivosDocumento9 páginasIntroducción, Generalidades y ObjetivosCristian Ugaz SoberónAún no hay calificaciones
- Subir Mic !Documento27 páginasSubir Mic !Cristian Ugaz SoberónAún no hay calificaciones
- Ejercicios de MatlabDocumento6 páginasEjercicios de MatlabCristian Ugaz SoberónAún no hay calificaciones
- Estad Caso 1Documento22 páginasEstad Caso 1Cristian Ugaz SoberónAún no hay calificaciones